



S120矢量轴支持基本定位功能,在激活基本定位功能时“位置控制”功能被自动激活(r0108.3=1),并且只有对位置控制进行正确的配置才能保证基本定位器的正常工作。
1.一般特性
位置控制器主要包括以下部分:
1)位置实际值处理。
2)位置控制器。
3)监控。
2.位置实际值处理
位置实际值处理可将位置实际值转换为中性长度单位LU(LengthUnit)。通过编码器接口Gn_XIST1、Gn_XIST2、Gn_STW和Gn_ZSW进行位置信息采集。而这些接口提供包含编码器线数和细分分辨率(增量)的位置信息。
不管位置控制器是否使能,一旦系统起动并通过编码器接口获得有效值后,便立即开始处理位置实际值。通过参数p2502(编码器分配)可以指定由哪个编码器(1、2或3)来采集位置实际值。
在分配编码器后会自动执行以下互联:
1)p0480[0](G1_STW)=编码器控制字r2520[0]。
2)p0480[1](G2_STW)=编码器控制字r2520[1]。
3)p0480[2](G3_STW)=编码器控制字r2520[2]。
p2502=1电动机编码器1用作位置控制如图8-74所示。
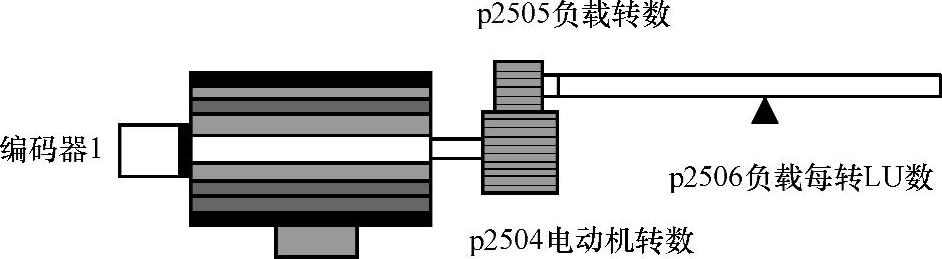
图8-74 p2502=1电动机编码器1用作位置控制(https://www.xing528.com)
p2502=2外部编码器2用作位置控制如图8-75所示。
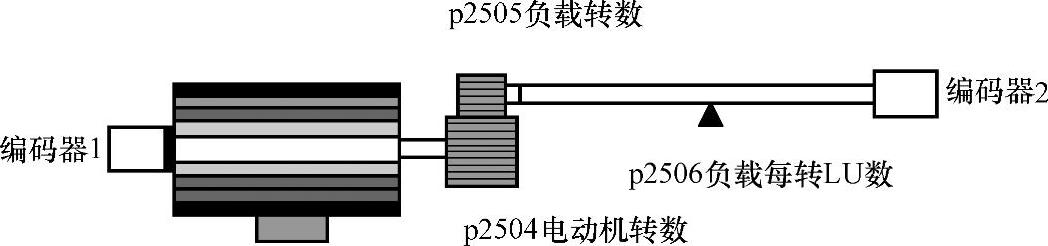
图8-75 p2502=2外部编码器2用作位置控制
在使用旋转编码器时,物理量和中性长度单位LU的关系由参数p2506(负载每转的LU数)确定。参数p2506和p2504、p2505共同确定了编码器增量和中性长度单位LU之间的关系。
示例:
旋转编码器、滚珠丝杠螺距为10mm/rev。要求每10mm的分辨率为1μm,即:1LU=1μm。则:p2506=10mm/1μm=10000LU。
3.位置控制器
位置控制器是一个比例积分控制器(默认采用纯比例控制)。比例增益可以由模拟量互联输入p2537(位置控制器适配)和参数p2538(Kp)的乘积加以调节。没有前馈的位置控制器,转速设定值由模拟量互联输入p2541(限制)设定极限。这个模拟量互联输入已经和输出p2540预联。位置控制器的使能信号可通过二进制互联输入p2549(位置控制器1使能)和p2550(位置控制器2使能)相与来激活。位置控制器如图8-76所示。
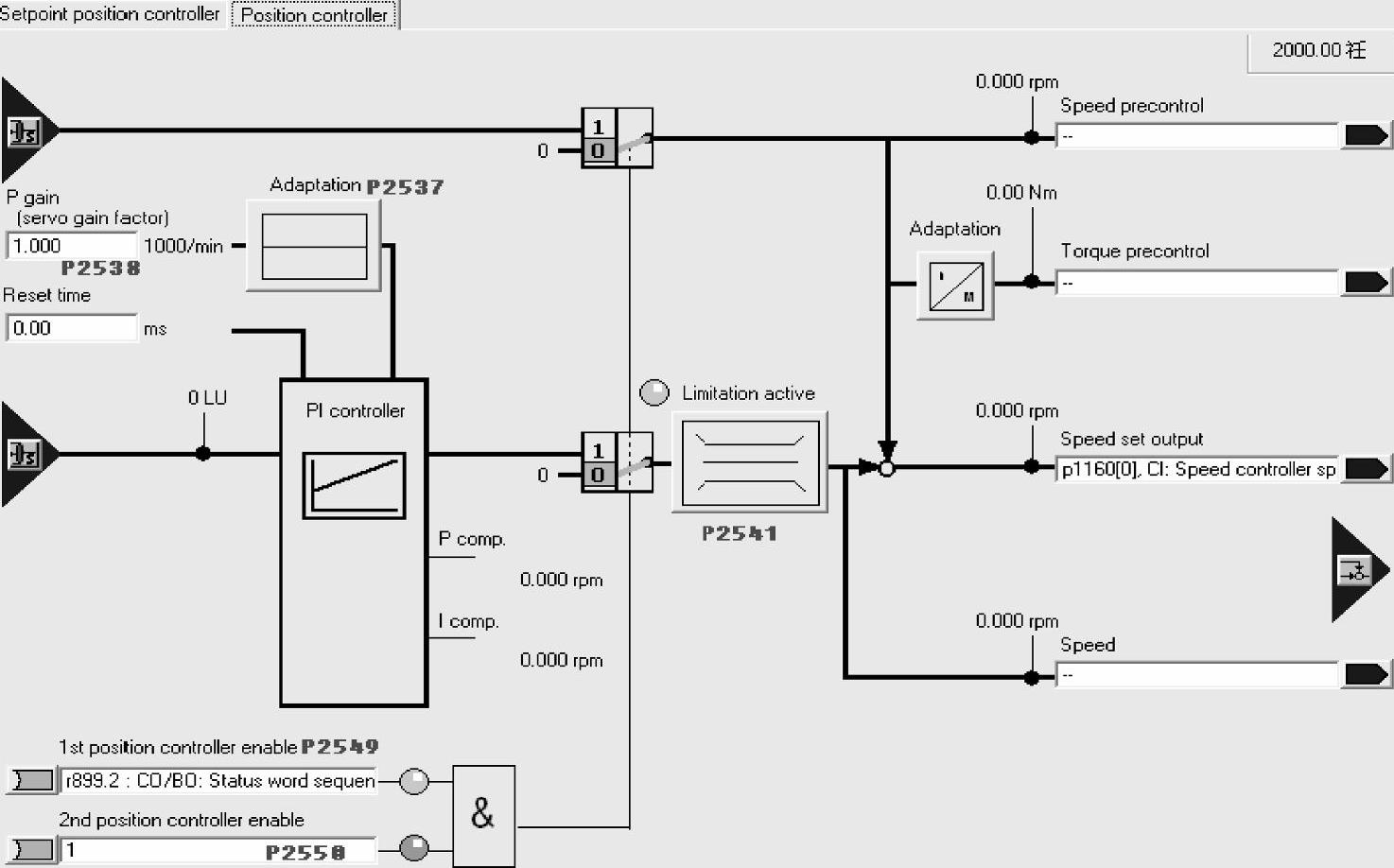
图8-76 位置控制器
4.监控
位置控制器可以监控静态、定位状态和跟随误差。静态监控由二进制互联输入p2551(设定值静止)和p2542(静态窗口)激活。如果在监控时间(p2543)到达后没有进入静态窗口,则输出故障F07450。定位监控由二进制互联输入p2551(设定值静止)、p2554=0(运动指令不生效)以及p2544(定位窗口)激活。在监控时间(p2545)到达后会检查定位窗口。如果没有进入该窗口,则输出故障F07451。
位置监控如图8-77所示。
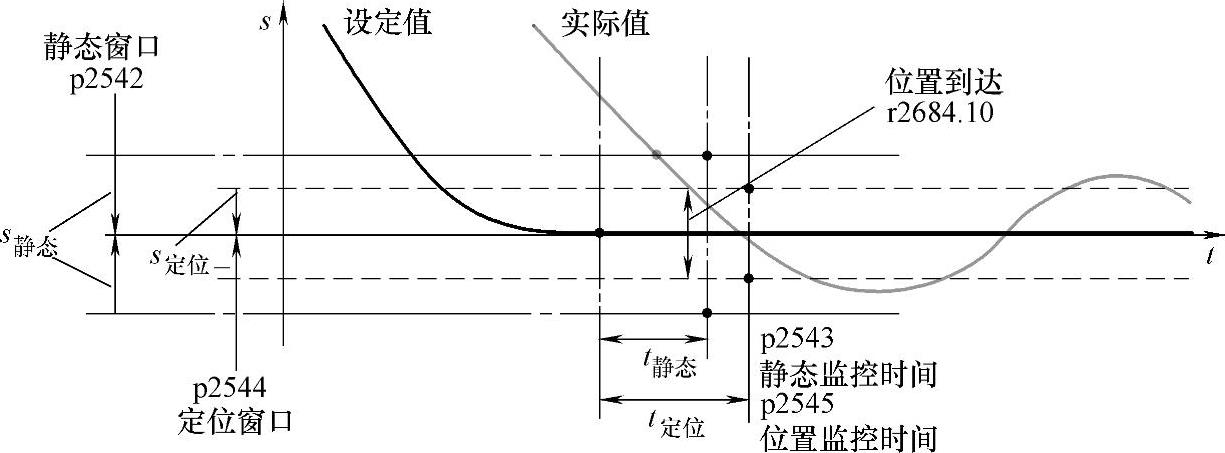
图8-77 位置监控
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。