



【摘要】:速度控制器自适应功能用于抑制可能出现的速度控制器的振荡。此外可以设置p1400.6=1优化和转速相关的Tn_n适配分量。该Tn_n值除以自由适配的系数,得到新的Tn_n。以此来取消自动下调速度控制器的动态特性。图8-27 Kp_n/Tn_n自适应速度控制器Kp_n/Tn_n的自动调整如图8-28所示。图8-28 速度控制器Kp_n/Tn_n的自动调整无编码器运行中弱磁范围内的特例在无编码器运行中p1464的值大于p1465的值,因此特性相反:提速时Kp上升,而Tn下降,随着转速上升动态性能会上调。
速度控制器自适应功能用于抑制可能出现的速度控制器的振荡。此功能在工厂设置中默认为激活状态。在调试和旋转测量时可自动计算所需值。
如果仍然出现转速振荡,还可以通过激活自由连接Kp_n自适应信号(在p1455上连接一个信号源)来优化Kp_n分量。由此得出的系数再与转速相关的Kp_n适配值相乘,得到新的Kp_n。参数p1456~p1459用于设置自由Kp_n适配的作用范围。
此外可以设置p1400.6=1优化和转速相关的Tn_n适配分量。该Tn_n值除以自由适配的系数,得到新的Tn_n。
设置p1400.5=0可以禁用Kp_n/Tn_n自适应功能。以此来取消自动下调速度控制器的动态特性。
Kp_n/Tn_n自适应如图8-27所示。
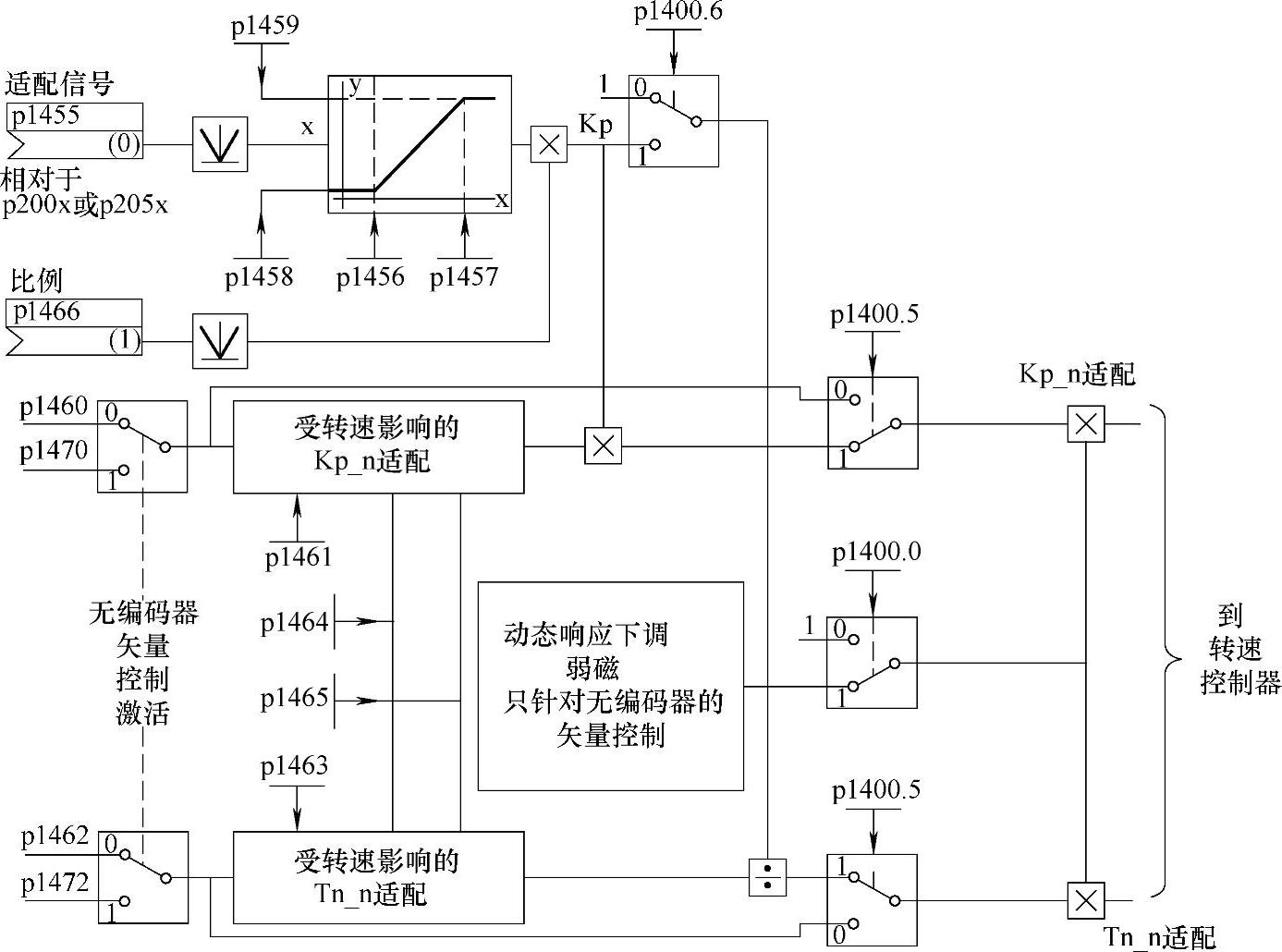
图8-27 Kp_n/Tn_n自适应
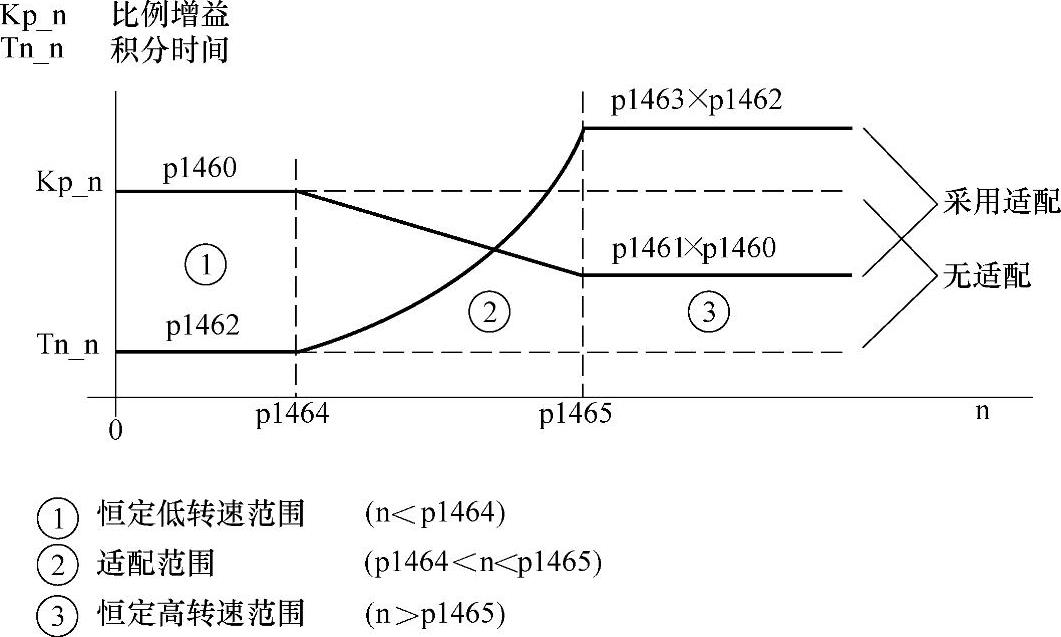
速度控制器Kp_n/Tn_n的自动调整如图8-28所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-28 速度控制器Kp_n/Tn_n的自动调整
无编码器运行中弱磁范围内的特例
在无编码器运行中p1464的值大于p1465的值,因此特性相反:提速时Kp上升,而Tn下降,随着转速上升动态性能会上调。
在无编码器运行模式下,设置p1400.0=1可激活弱磁区域的动态响应特性下调。
Kp/Tn~磁通设定值
Kp/Tn随磁通设定值成比例降低(最小系数0.25)。
激活该功能可以降低控制器在弱磁区域内的动态特性。速度控制器在弱磁区域前都保持较高的动态特性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。