



在不带编码器的矢量控制中(Sensorless Vector Control,SLVC),实际磁通或电动机的实际转速原则上须通过电动机电气模型计算得出,该模型借助电流或电压进行计算。
而在0 Hz左右的低频区内,模型无法精确地计算出电动机实际转速。因此在低频范围内矢量控制会从闭环切换为开环。
开闭环切换条件
开环控制和闭环控制之间的切换是由时间条件和频率条件(p1755、p1756和p1758)控制的。如果斜坡函数发生器输入端的设定频率和实际频率同时低于“p1755 x(1-(p1756/100%))”的乘积,则时间条件无效。SLVC的切换条件如图8-25所示。
在开环控制中,模型计算出的转速实际值与设定值相同。为使电动机在重载起动时(如起重应用)立即输出静态或动态的转矩,必须依据负载所需的最大转矩来设置增加输出转矩参数:p1610—设置增强静态转矩;p1611—设置增强动态转矩。
在驱动异步电动机(ASM)时,p1610设为0%时只注入励磁电流r0331;设为100%时注入电动机额定电流p0305。
在驱动永磁同步电动机(PEM)时,p1610=0%时电动机将获得由附加力矩r1515推导出的前馈电流值,而不是注入励磁电流。为了防止电动机在加速过程中堵转(失步),可以提高p1611或使能速度控制器的加速前馈,这同时也可以有效地防止电动机在低速区内过热。
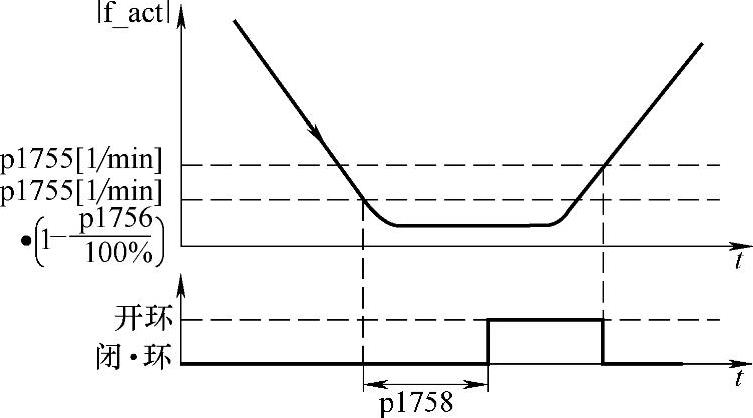
图8-25 SLVC的切换条件
如果驱动的转动惯量几乎保持恒定,请优先使用p1496加速前馈控制这种方法,而不是增大动态附加转矩p1611。
驱动系统的转动惯量可通过旋转测量确定:p1900=3且p1960=1。
在低频区内不带编码器的矢量控制有下面几个特点:
1)p1750.2=1和p1750.3=1时,驱动在被动负载条件下处于闭环控制,直至输出频率约为0Hz(p0500=2,该运行方式只适用于被动负载)。
2)当斜坡函数发生器前的速度设定值大于p1755时,异步电动机完全励磁后在闭环控制中起动。
3)如果驱动超过闭环/开环切换转速p1755运行的时间比p1758中设置的等待时间段,且斜坡函数发生器前的速度设定值超出p1755,电动机不用切换到开环控制也可以反向。
4)在转矩控制模式下,电动机原则上会在低速区切换到开环控制。
被动负载是指只能被电动机驱动而不能驱动电动机的负载,例如:惰性质量、泵、风扇、离心机、挤出机、运行驱动、水平输送装置等。此类负载的电动机可长时间处于静止状态,无需保持电流。在静止状态下运行时仅会向电动机注入励磁电流,且负载自身不生成有效转矩并且因此只对异步电动机的驱动力矩做出反应。
无编码器的矢量控制方式驱动被动负载时,可进行以下设置:(https://www.xing528.com)
1)p0500=2(工艺应用=无编码器闭环控制中的被动负载,直至f=0)。
2)之后设置p0578=1(计算工艺相关参数)。
此时会自动设置以下参数:
—p1574=2 V(使用他励同步电动机时=4V);
—p1750.2=1,被动负载条件下在0Hz前一直在闭环控制中运行;
—p1802=4(RZM/FLB,不进行过调制);
—p1803=106%(出厂设置)。
经过这些设置后,被动负载功能自动激活。
注意
当负载转矩大于无编码矢量控制时的转矩限制时,电动机会制动直到停机状态。当使用异步电动机驱动被动负载时,可以设置p1750.6=1,在超出时间p1758后不切换到开环控制;当使用同步电动机驱动被动负载时,也可以设置p1750.6=1,在超出时间p1758后不切换到闭环控制。如有必要时可延长p2177“电动机堵转延时”以防止频繁的堵转故障。驱动主动负载时不允许使用此功能!
如果在电动机调试内设置了p0500,就可以通过p0340和p3900自动计算。p0578因此自动设置。在此运行方式中,频率接近为0 Hz时不可进行静态再生运行。
无编码器的矢量闭环控制如图8-26所示。
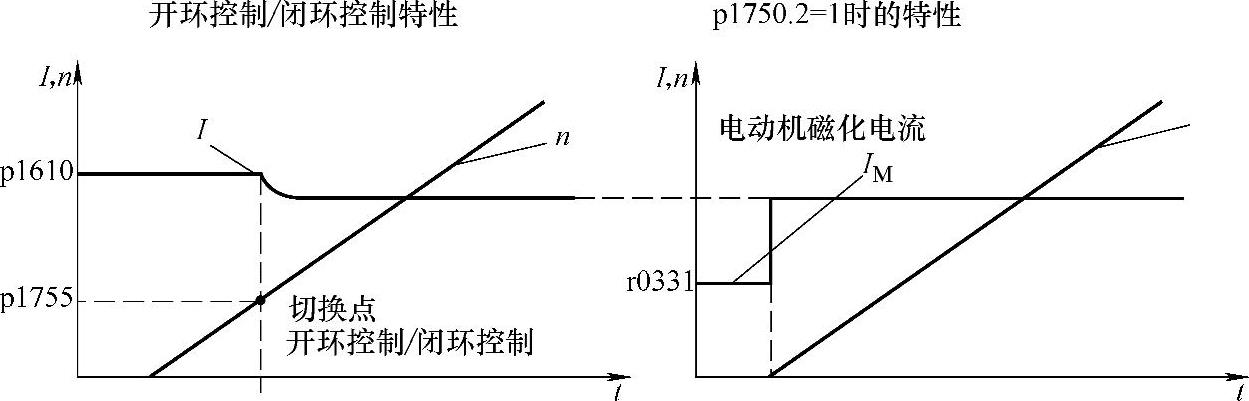
图8-26 无编码器的矢量闭环控制
主动负载是指可以使电动机反向的负载(例如提升机构上的负载),电动机在这种负载条件下必须在转速开环控制中起动。为此必须设置p1750.6=0(电动机堵转时进入开环控制)。此时静态转矩设定值p1610必须大于最大可能出现的负载转矩。
注意
针对低速区内再生负载转矩比较高的应用,可以额外设置p1750.7=1。电动机模型的开环/闭环切换转速因此提高,电动机可以更快地进入开环控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。