



为简化成组驱动的调试,即同一变频器上接有多个相同电动机的情况,可在STARTER中或通过专家列表,在参数p0306中设置并联电动机的数量。
根据设置的电动机数量,系统内部会自动计算等效电动机。电动机数据识别功能可以确定等效电动机的数据。电动机并联时也可使用编码器(仅在第1个电动机上)。
1.特性
1)在同一变频器上可以最多允许并联50台电动机。
2)原始电动机数据组(p0300等参数)保持不变,仅会根据并联电动机的数量在闭环控制中改变传送的数据组。
3)电动机并联时可以执行电动机数据静态识别。
4)在电动机旋转没有任何限制时,可以执行动态识别(旋转测量)。在动态识别中,电动机负载不均,齿轮箱间隙太大等都会对测量结果产生不利影响。
5)在电动机并联时,应尽量确保电缆长度均匀分布,使各个电动机的电流分布尽量相同。
2.矢量控制模式下通过STARTER调试
在STARTER调试窗口中有参数p0306。在后续的设定中,p0306会计入电流极限p0640和基准电流p2002。参数p0306的取值范围为1~50,且会受电动机数据组(MDS)影响。
3.电动机并联时的设置方法
1)电动机需要并联时,首先在下拉菜单中选中需要的电动机,然后激活选项“Parallel connection of motor”。
2)在输入栏“Number”中输入并联电动机的数量。
集成了DRIVE-CLiQ接口(SINAMICS集成编码器模块)的电动机也可并联。第一个电动机通过其编码器上的DRIVE-CLiQ接入系统。其它参与并联的其它电动机型号必须相同。根据参数p0306的设置以及DRIVE-CLiQ接口传送上来的信息可以确定所有需要的电动机数据。矢量控制模式下的并联电动机选择如图8-24所示。(https://www.xing528.com)
4.S120中电动机并联的功能特性
1)铭牌参数和等效电路图参数为单个驱动的数据。
2)并联数据组没有代码号。总电动机数据由p0306和单个电动机的代码计算得出。并联的每个电动机的互锁机制相同。
3)“Motor data”窗口中只显示已选单个电动机的数据。
3.电动机并联的限制
并联的前提是,各个电动机已经通过负载机械相连。如果需要断开某个电动机,必须通过DDS/MDS切换在p0306中减少电动机数量。得出的等效电路图会因此发生改变,并可能需要重新运行数据组,例如:在电动机数量减少后,重新识别电动机数据。否则功率单元会使用错误的电动机数据。
如果需要在编码器运行时使电动机和编码器断开,则可以使用EDS切换,或使用两个SMC。
若驱动通过负载相连且电动机转速相同而又不超过失步转速,在带编码器的矢量控制模式下,并联驱动控制相当于单台驱动控制。
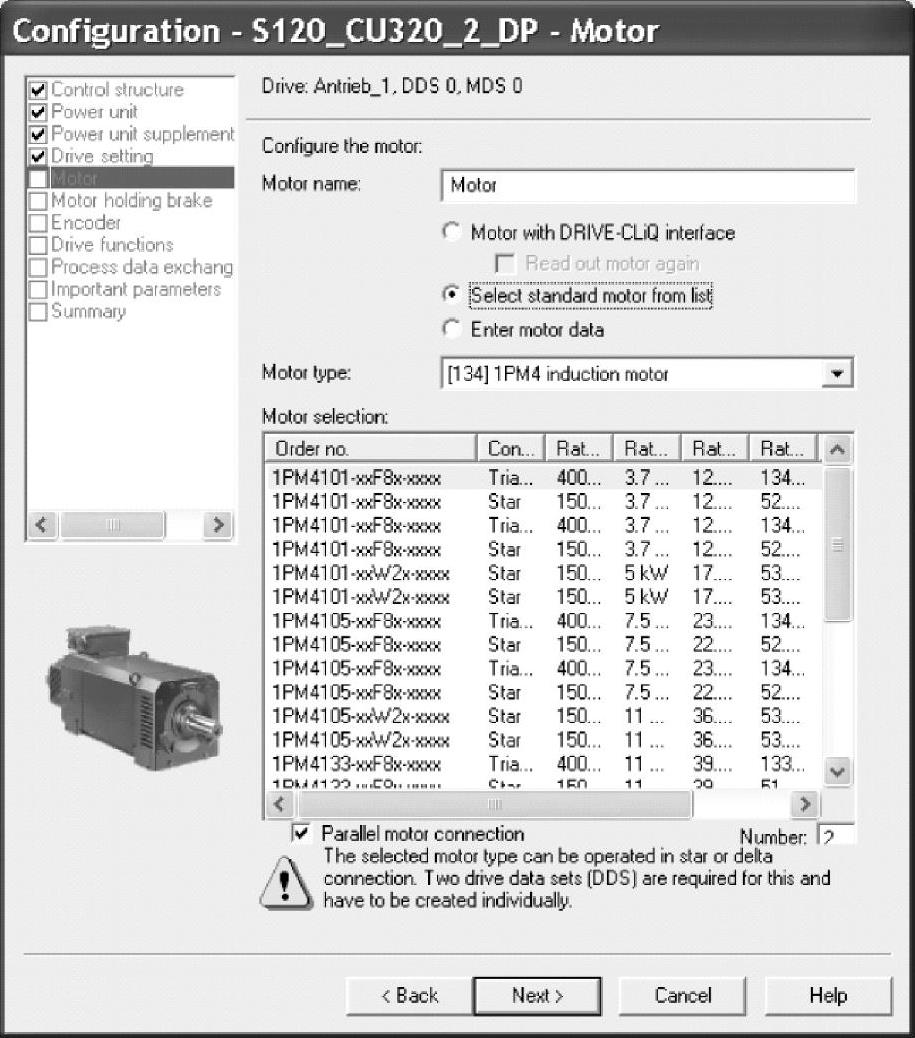
图8-24 矢量控制模式下的并联电动机选择
反例:
几台电动机的转速通过一具有较大传动比的齿轮箱传导到负载上,此时存在较大的齿轮间隙和较高的弹性形变。若负载带动某个电动机旋转,而另一些仍保持静止,则没有编码器的驱动出现失步。
如果一台电动机出现故障,此电动机保护开关会因过电动机电流而断开。此时功率单元被控制器关断;电动机出现匝间短路故障时,功率单元进入故障状态。然后必须从并联回路中删除该电动机。参数p0306可以通过DDS/MDS切换修改。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。