



永磁同步电动机较三相交流异步电动机具有响应快、起动转矩大、控制简单和功率因数高的优点。其能够在低速下输出大转矩并且具有较高的动态响应能力。目前S120驱动永磁同步电动机方案已获得广泛应用。
1.离线基本配置
永磁同步电动机离线配置流程和方法与异步电动机配置过程基本一致,仅在选择电动机类型和输入电动机数据时略有不同,如图7-45,图7-46所示。
永磁同步电动机多采用带编码器的矢量控制,下面仅以带Zero Mark的HTL增量式编码器为例进行介绍,通过Zero Mark还可对转子的磁极位置精确测量。其配置如图7-47,图7-48所示。
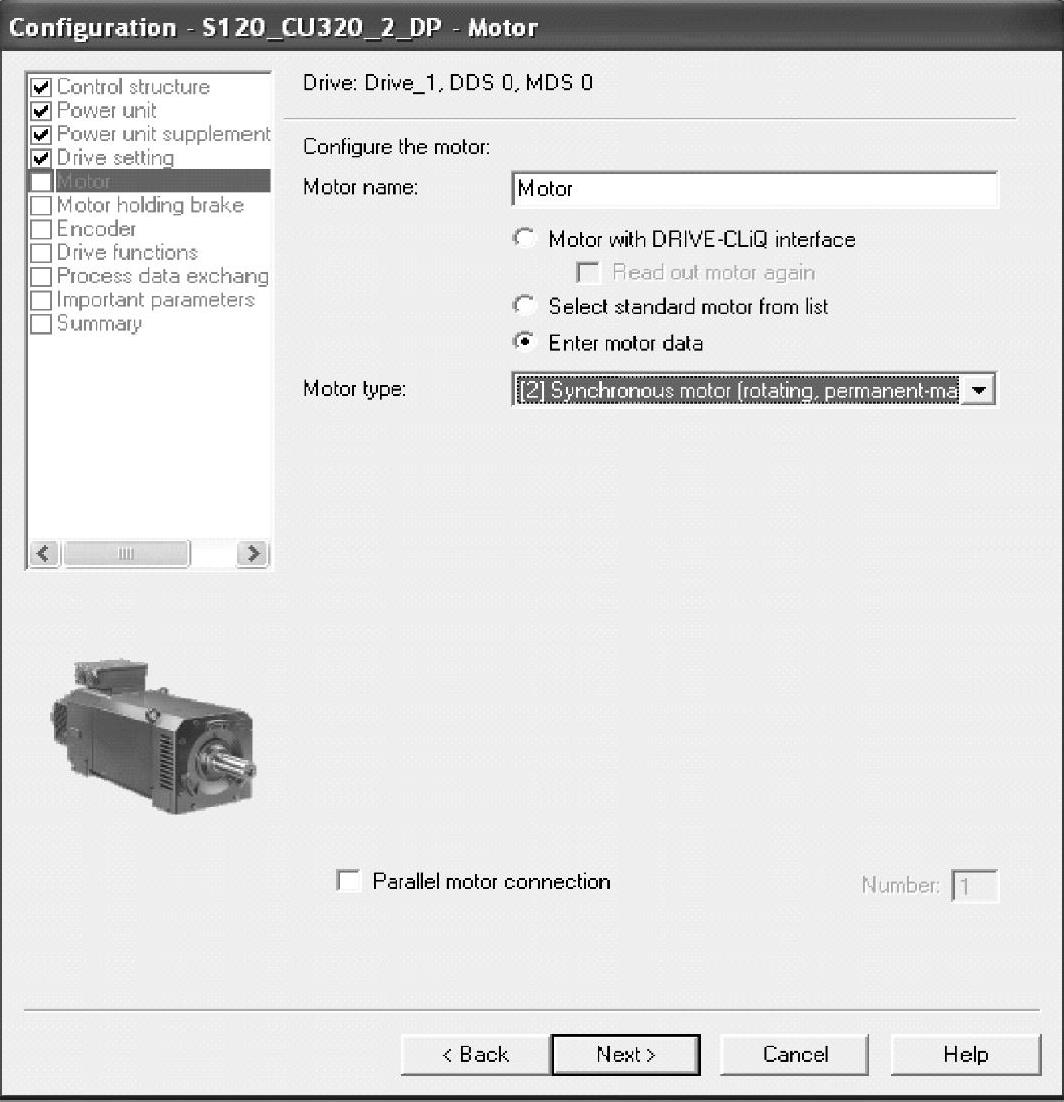
图7-45 选择永磁同步电动机
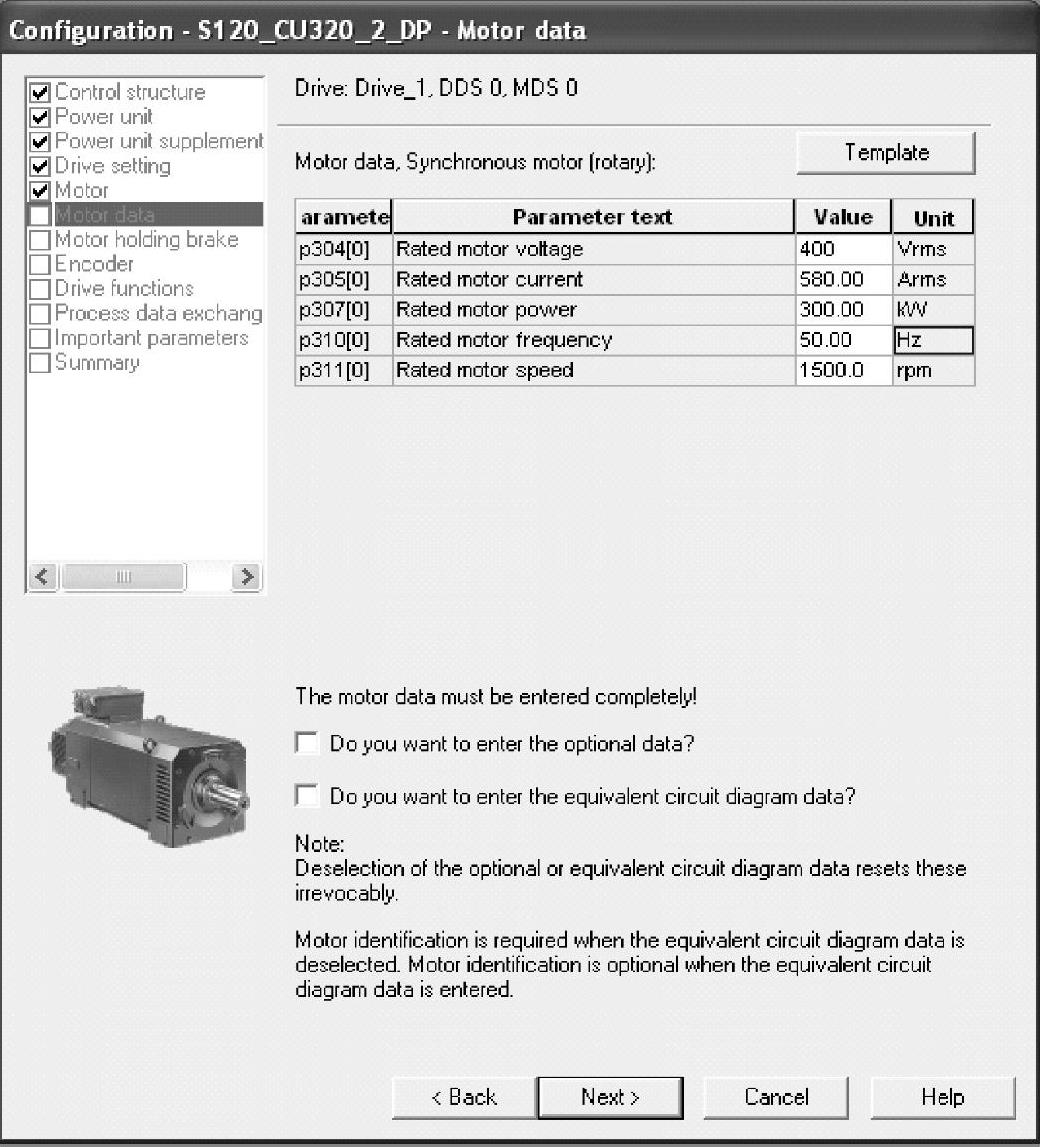
图7-46 输入电动机铭牌参数
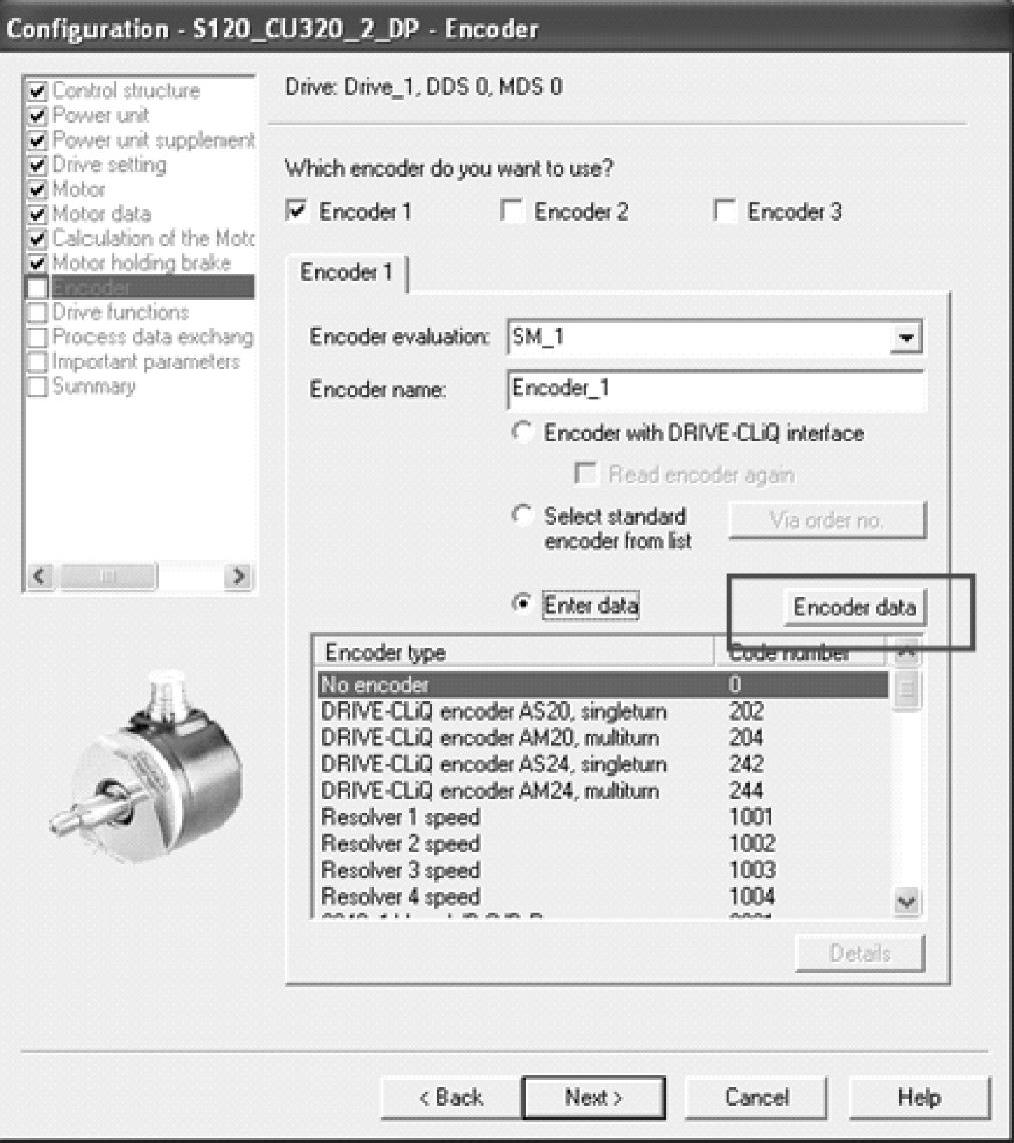
图7-47 选择编码器类型
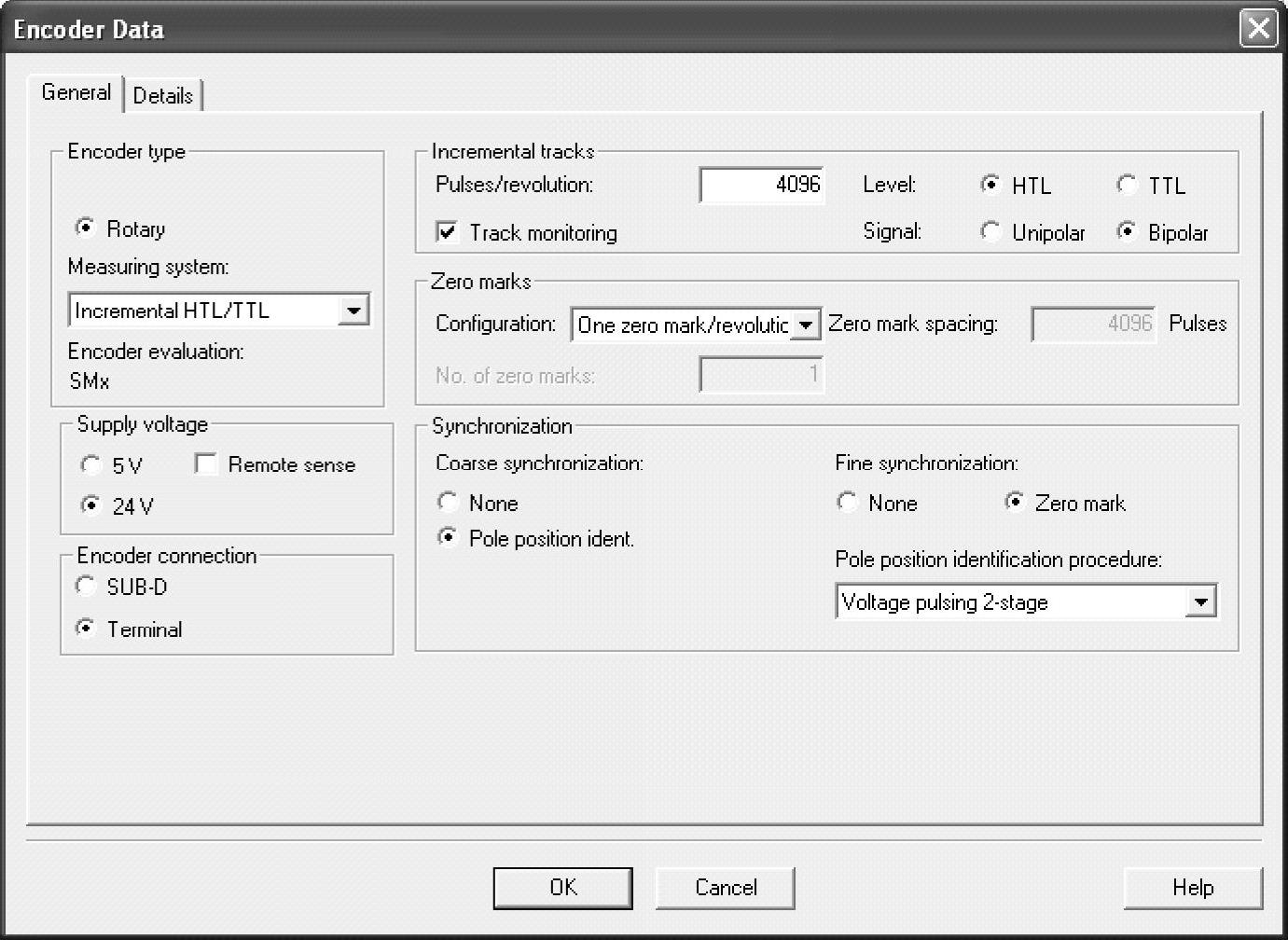
图7-48 SMC30连接双极性HTL编码器
2.永磁同步电动机的优化
在完成上述步骤后,可以进行逆变模块的模拟运行,过程与异步电动机相同。
在模拟运行完毕且电动机侧接线完毕后,可以给变频器上电,上电无误后可以对永磁同步电动机进行优化。
1.电动机辨识:p1910=1
电动机辨识的条件:电动机冷态,脱开机械负载。
永磁同步电动机的电动机辨识也是用来确定电动机等效电路参数的,因此与异步电动机的辨识激活过程一致。逆变单元与永磁同步电动机的等效电路如图7-49所示。
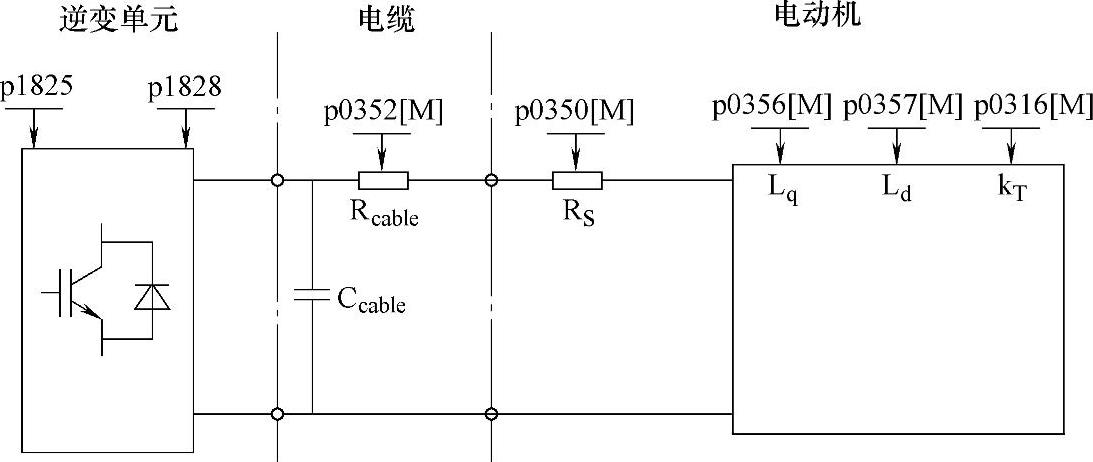
图7-49 逆变单元与永磁同步电动机等效电路
电动机辨识步骤:
首先设置p1910=1,CU报警A07991提示已激活电动机辨识;然后起动变频器,自动执行电动机辨识,电动机辨识完成后,p1910自动恢复为0。r0047可显示测量电流状态,电动机辨识在线修改如下参数:p0350,p0356,p0357,p1825,p1828...p1830。
2.磁极位置辨识与自动编码器校准(https://www.xing528.com)
对于永磁同步电动机,为了实现磁场定向控制,需要在起动时通过磁极位置辨识测量出电气上的磁极位置。因此在完成电动机辨识之后,需要进行转子磁极位置辨识。通常情况电气上的磁极位置可以通过对编码器(此编码器必须能够获得绝对的位置信息,如带C/D-、R-track的Sin/Cos编码器、旋转变压器以及绝对值编码器)进行机械调整而获得,这种情况下就不需要进行磁极位置的辨识。对于带Zero mark的HTL增量式编码器,在电动机起动时必须进行转子磁极位置的辨识,否则在重载的情况下,无法保证电动机能正常起动。通过磁极位置辨识可以测出电气上的磁极位置从而决定在电动机起动时转子的位置。
磁极位置辨识需要设置参数p1982=1(使能磁极位置的辨识),p1980=4(voltage pul-sing,2-stage),然后起动逆变单元,设备自动检测磁极位置,在测量期间电动机必须保持静止,以保证转子磁极位置不变。在检测到转子磁极位置以后,系统就将d轴定在转子磁极的实际位置,这时转矩电流的频率和相位完全通过编码器信号来计算得出,逆变单元只需要控制电流的大小就可以实现对电动机转矩的控制,从而实现对永磁同步电动机的精确控制。
对转子磁极位置的精确测量,直接影响对同步电动机的控制效果和电动机电流的大小,但是转子磁极位置辨识方式并不能实现对转子位置的精确测量。为了实现对转子磁极位置的精确测量和修正,对于上述编码器,可以对电动机编码器的零脉冲与转子磁极位置之间的角度进行检测,因为电动机编码器一旦安装好以后,编码器零脉冲与转子磁极位置的角度关系就是唯一的确定值。
因此需要执行自动编码器校准:设置p1990=1(电动机抱闸,此时必须打开,以保证电动机可以自由转动),然后通过控制面板起动逆变单元,将速度给定设置的小一些,速度越低,辨识的效果越好。辨识的结果写入到参数p431(零脉冲与转子磁极位置之间的角度)。
3.旋转测量
永磁同步电动机的旋转测量与异步电动机的旋转测量步骤相同。
(1)旋转测量p1960=1/2(1=无编码器,2=带编码器)
旋转测量的条件:电动机冷态,抱闸装置没有闭合,脱开机械负载。
对于带编码器应用,先通过V/f方式起动电动机,查看编码器反馈速度R61与设定速度的方向、大小是否一致。
电动机连接负载前,用p1960=1(不带编码器)或p1960=2(带编码器)来激活“旋转测量”,旋转测量可以用来计算电动机转动惯量、转矩常数等相关参数。
旋转测量步骤:
电动机空载下,设定p1960=1/2后,CU报警A07980提示已激活旋转测量;然后起动变频器,电动机自动旋转,旋转测量完毕后电动机停转,p1960自动恢复为0。
(2)速度控制器优化:p1960=3/4(3=无编码器/4=带编码器)
速度控制器优化的条件:电动机冷态,抱闸装置没有闭合,电动机转动过程中机械系统无危险。
对于带编码器应用,先通过V/f方式起动电动机,查看编码器反馈速度R61与设定速度的方向、大小是否一致。
电动机连接可以自由旋转的有效负载后,需要用p1960=3(不带编码器)或p1960=4(带编码器)来激活速度控制器优化。
注意:在速度控制器优化之前,需要设定p1967动态性能参数。若此参数设置过大会造成运行不稳定和转矩波动较大,因此建议在工艺条件允许的情况下,尽量减小p1967的值,以保证驱动系统在整个调速范围内的稳态精度。
速度控制器优化步骤:
电动机轴端连接可以自由旋转的负载后,设定p1967,p1960=3/4等参数,CU报警A07980提示已激活旋转测量;然后起动变频器,电动机旋转并自动优化速度调节器参数,优化完毕后电动机停转,p1960自动恢复为0。
注意
执行完优化后,需要执行“Copy RAM to Rom”对参数进行永久保存,并执行一次上载。确保CF卡、RAM和离线项目数据保持一致。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。