



利用励磁控制系统抑制次同步振荡的想法最早于1975年由日本学者提出[3],用于抑制由自励磁引起的次同步振荡。后来国内外学者在此基础上进行研究,提出了不同的控制策略[4-9]。20世纪70年代末,美国的Navajo电厂将基于励磁控制的方法作为该电厂抑制次同步振荡措施之一,并投入实际运行,所提出的控制器被称为附加励磁阻尼控制器(SEDC)[10,11]。IEEE次同步谐振工作组于1980年在抑制次同步振荡措施的总结报告中,将这种励磁系统附加控制作为抑制SSO的推荐措施之一[1]。在我国,上都电厂和伊敏电厂也安装了SEDC装置[12,13]。本节重点介绍SEDC的基本工作原理及设计方法。
9.3.1.1 基本工作原理
SEDC的结构如图9-1所示,与PSS的结构相似,主要包括滤波环节、移相环节、放大环节以及限幅环节。SEDC通常以发电机的转速偏差或发电机输出功率的振荡分量作为输入,采用分模态控制时,经过与发电机轴系扭振模态频率相对应的滤波器,形成各模态的振荡分量,再分别对这些模态分量进行移相和比例放大,最终叠加后形成统一的控制量,经限幅后作为励磁系统电压调节器的辅助信号参与对励磁电压的调节,从而在发电机的励磁绕组中产生相应的电流分量,进而形成抑制发电机组次同步振荡的阻尼转矩[6,14]。如图9-2所示,图中ΔTe0为未加入SEDC时发电机的电磁转矩偏差,当ΔTe0位于第三、四象限时,ΔTe0在Δω轴上的投影为负,也就是阻尼转矩为负,可能导致系统不稳定。SEDC若能提供适当的正阻尼转矩,最好是与Δω同相位的纯粹的正阻尼转矩ΔTe1,使得ΔTe0与ΔTe1的合成转矩ΔTe2位于第一象限,那么对应的阻尼转矩分量为正,有利于抑制次同步振荡。
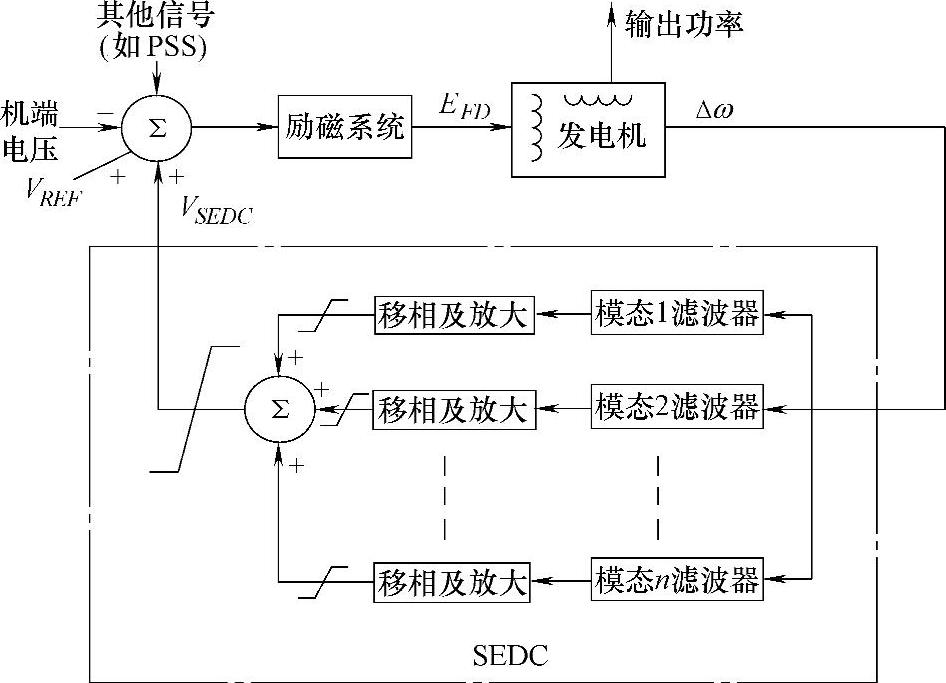
图9-1 SEDC结构示意图
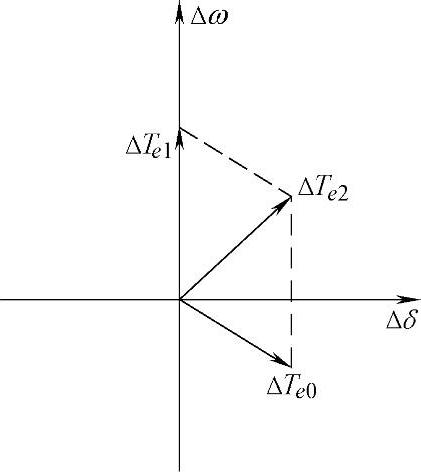
图9-2 转矩相量图
9.3.1.2 参数设计
下面以图5-18所示伊冯/呼辽交直流系统为典型算例,针对6.5.1节所述呼伦贝尔电厂发电机组的次同步振荡问题设计SEDC参数。
1.模态滤波器设计
模态滤波器应能够提取出本模态的信号,并滤除相邻模态的信号,因此,各模态滤波器由本模态的带通滤波器和相邻模态的带阻滤波器构成。当几个模态的频率比较接近时,滤波器的设计就变得比较困难。带通和带阻滤波器的形式很多,这里选择Butterworth滤波器。
模态1滤波器的幅频相频特性如图9-3所示。
由图9-3可见,模态1滤波器在中心频率处所对应的相位约为-26°,该相位需在后面的相位补偿环节进行补偿。
模态2滤波器的幅频相频特性如图9-4所示。
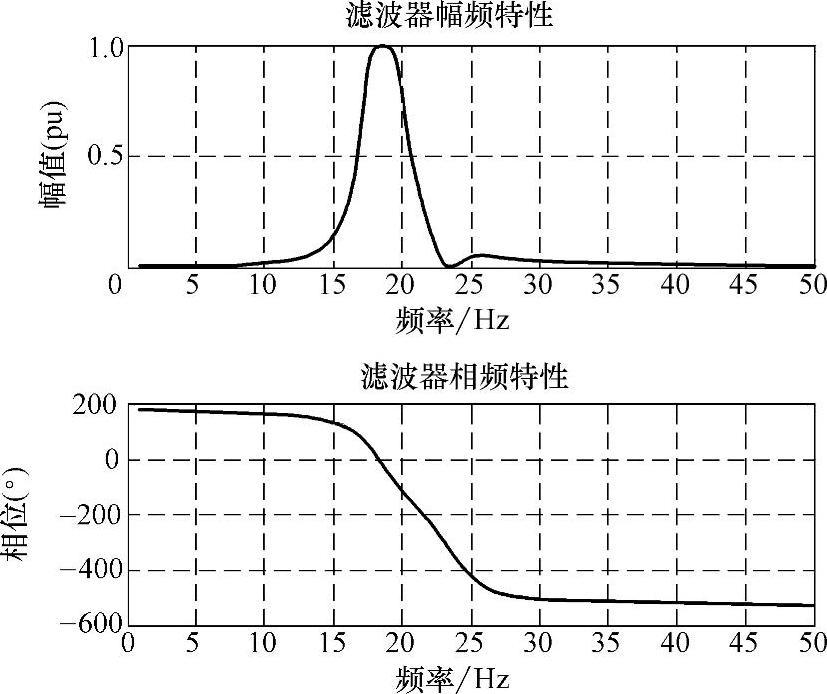
图9-3 模态1滤波器的幅频相频特性
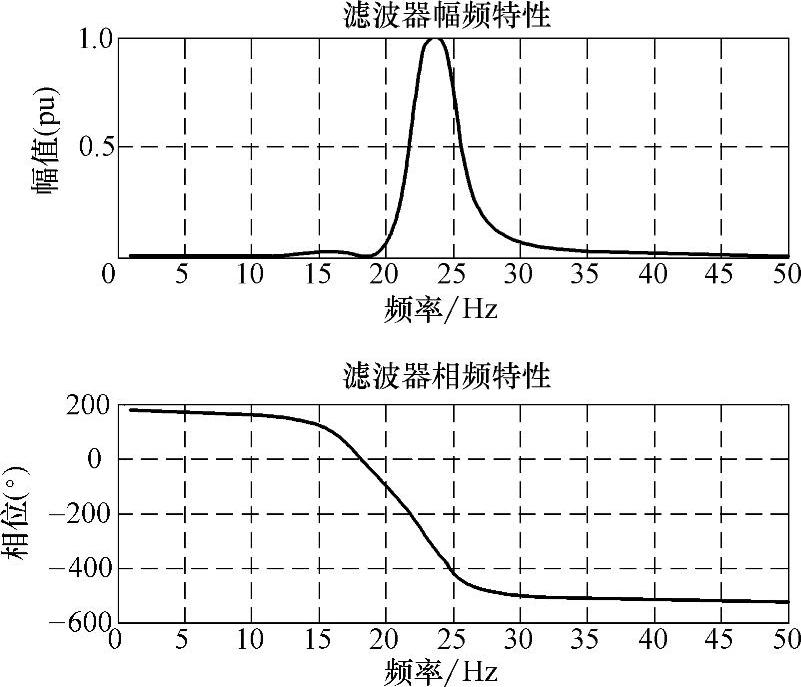
图9-4 模态2滤波器的幅频相频特性
由图9-4可见,模态2滤波器在中心频率处所对应的相位约为-324°,该相位需在后面的相位补偿环节进行补偿。
2.相位补偿环节设计
设计SEDC相位补偿环节,需要先求出各模态待补偿相位,计算待补偿相位时,既要考虑滤波器引入的相位偏差,又要考虑从励磁控制器输入端到发电机电磁转矩Te的相位特性。可以采用测试信号法求出从励磁控制器输入端到发电机电磁转矩Te的相位特性,具体做法是:在励磁控制器的输入端加入一系列小幅正弦扰动信号ΔVS,频率从1Hz至50Hz,待系统稳定后截取公共周期上的ΔTe和ΔVS信号,进行傅里叶分解,求出ΔTe与ΔVS的相位差,即为从励磁控制器输入端到发电机电磁转矩Te的相位特性,如图9-5所示。改变发电机出力以及系统接线方式,在不同运行方式下测试从励磁控制器输入端到发电机电磁转矩Te的相位特性,测试结果表明,运行方式对相位特性的影响不大,可以基于图9-5所示的相位特性设计SEDC相位补偿环节。
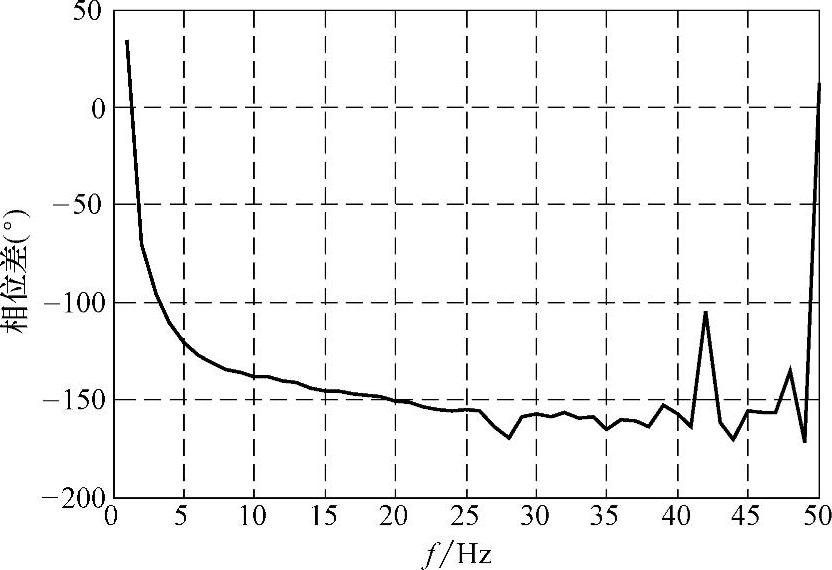
图9-5 从励磁控制器输入端到发电机 电磁转矩Te的相位特性
相位补偿环节可选用式(9-1)所示的形式:

式(9-1)中,相位补偿环节的时间常数Ta和Tb可根据式(9-2)选择:

式(9-2)中,ωx为待补偿模态的角频率,ϕ为在ωx处待补偿的角度。(https://www.xing528.com)
由图9-5可知,励磁系统和发电机在模态1处的待补偿相位为-148°,模态1滤波器在中心频率处所对应的相位约为-26°,两者之和为-174°。所以,模态1选用3个相位补偿环节,每个补偿58°,利用式(9-2)计算得到相位补偿环节的时间常数:Ta=0.0297,Tb=0.0024。由图9-5可知,励磁系统和发电机在模态2处的待补偿相位为-155°,模态2滤波器在中心频率处所对应的相位约为-324°,两者之和为-479°,加上360°为-119°。所以,模态2选用3个相位补偿环节,每个补偿39°,利用式(9-2)计算得到相位补偿环节的时间常数:Ta=0.0141,Tb=0.0032。
3.限幅环节设计
作为一种附加励磁控制,SEDC对励磁控制系统的主控制环是一种干扰,其输出幅值不能太大,必须进行限幅。限幅环节参数的选取一方面可以参考PSS的限幅值设定,另一方面也要考虑抑制次同步振荡所需的阻尼转矩,以及发电机端所能承受的电压波动。由于呼伦贝尔电厂主要面临的不是发散的次同步振荡,而是频繁超标的低幅次同步振荡,所以这里将限幅值设为±0.05pu。
9.3.1.3 仿真验证
在PSCAD/EMTDC仿真软件中搭建图5-18所示系统,主要包括:
1)各发电厂模型,包括伊敏一、二、三期发电厂及鄂温克电厂、呼伦贝尔电厂。
2)各发电厂发电机组控制系统模型,包括励磁系统、PSS及调速器。
3)500kV及部分220kV输电线路模型。
4)呼辽直流输电系统模型,呼辽直流输电为双极±500kV,每极12脉动,配有交直流滤波器,采用典型的HVDC控制策略(整流侧定功率/定电流,逆变侧定电压/定熄弧角控制)。
5)在直流输电系统的整流侧控制中附加次同步阻尼控制器(SSDC)。
6)伊冯固定串联电容器(FSC)及晶闸管可控串联电容器(TCSC)模型。其中,TC-SC采用闭环阻抗控制方式。
1.小扰动仿真
由于呼伦贝尔电厂主要面临模态1的SSO问题,所以我们在此重点分析模态1。在直流功率参考值中增加扰动量,激发与呼伦贝尔电厂实际次同步振荡录波图类似的模态振荡曲线,SEDC模态1的增益分别取2、5、10,转速偏差的模态1分量如图9-6所示。
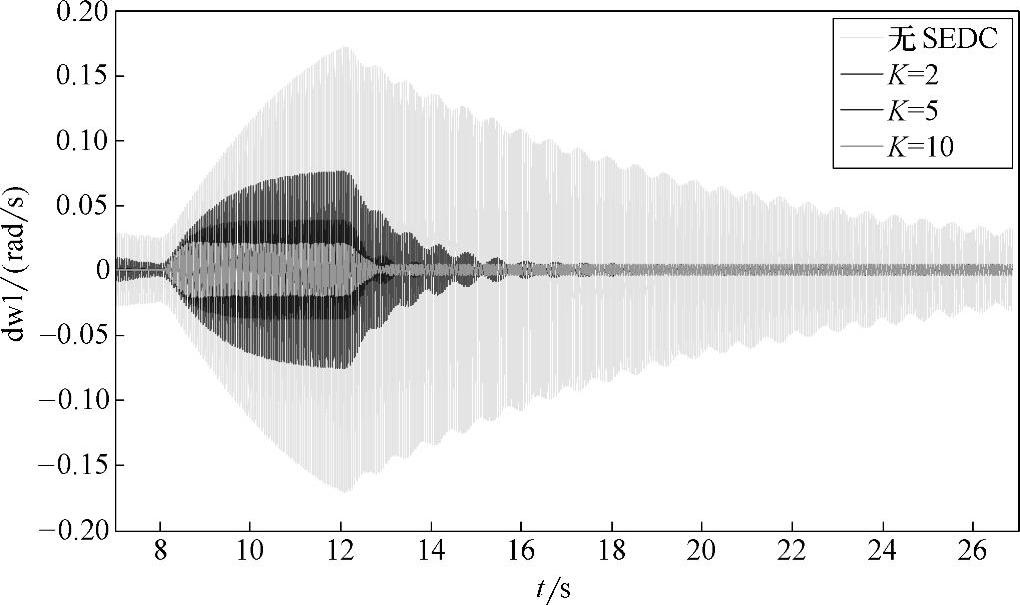
图9-6 SEDC模态1增益不同时,转速偏差的模态1分量
表9-1 不同增益SEDC对振荡峰值的抑制效果对比

由表9-1可见,无SEDC时,小扰动引起的转速偏差模态1分量的振荡峰值为0.17rad/s;当SEDC模态1的增益为2时,可将小扰动引起的转速偏差模态1分量的振荡峰值降至0.076rad/s,低于扭应力继电器(TSR)报警值0.1rad/s;当SEDC模态1的增益为5时,可将小扰动引起的转速偏差模态1分量的振荡峰值降至0.038rad/s;当SEDC模态1的增益为10时,可将小扰动引起的转速偏差模态1分量的振荡峰值降至0.021rad/s。小扰动下,SEDC输出均未达到限幅值。可见,SEDC抑制小扰动是很有效的,在不引起输出限幅的情况下,增益越大越好。
2.大扰动仿真
在图5-18所示的系统中,在呼伦贝尔换流站母线设置三相瞬时接地故障,0.05s后故障消除。转速偏差的模态1分量如图9-7所示。这里,SEDC模态1的增益为10,SEDC模态2的增益为20。
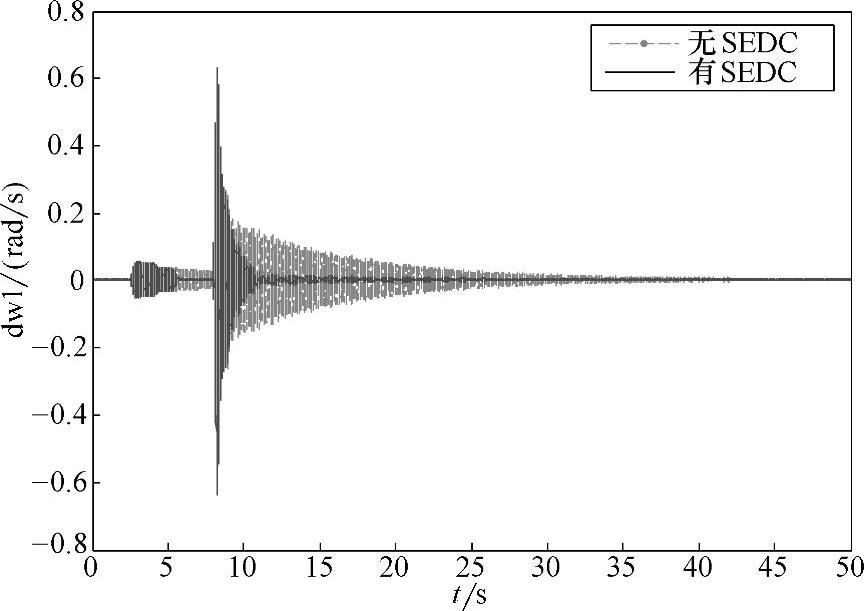
图9-7 大扰动时转速偏差的模态1分量
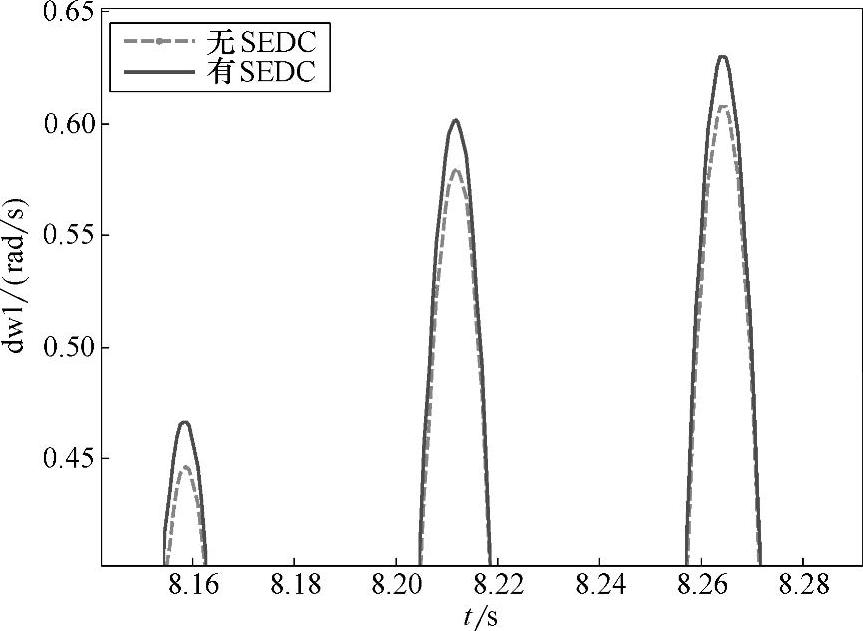
图9-8 大扰动时转速偏差的模态1分量(局部放大图)
由图9-7可见,SEDC能够比较有效地抑制故障引起的大扰动,但对于初始幅值的抑制效果不佳,甚至使初始幅值略微增大,图9-7中,从故障开始时刻8s至8.8s,SEDC使振荡幅值略微增大,局部放大如图9-8所示。
SEDC是附加控制环节,属于二次设备,成本远低于晶闸管可控串联电容器和阻塞滤波器等一次设备,具有良好的经济性,而且安装、调试、维护方便。但SEDC参数协调比较复杂,增益较大时容易达到限幅值,并且与励磁系统其他功能冲突;增益较小时降低了所提供的正阻尼幅值,削弱了抑制效果,增益难以协调。尽管SEDC存在以上不足之处,但它仍是解决SSO问题主要考虑的方案。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。