



6.4.3.1 STATCOM的数学模型
忽略STATCOM产生的谐波分量及变压器电阻,在abc三相坐标系中,系统与STATCOM之间的三相电压平衡方程为式(6-46)[20]:

式中,usa、usb、usc为STATCOM接入点的系统三相电压瞬时值;
uia、uib、uic为STATCOM输出的三相电压瞬时值;
ia、ib、ic为系统流入STATCOM的三相电流瞬时值。
abc坐标系与同步旋转dq坐标系之间的电压、电流变换关系为式(6-47)及式(6-48):

式中,变换矩阵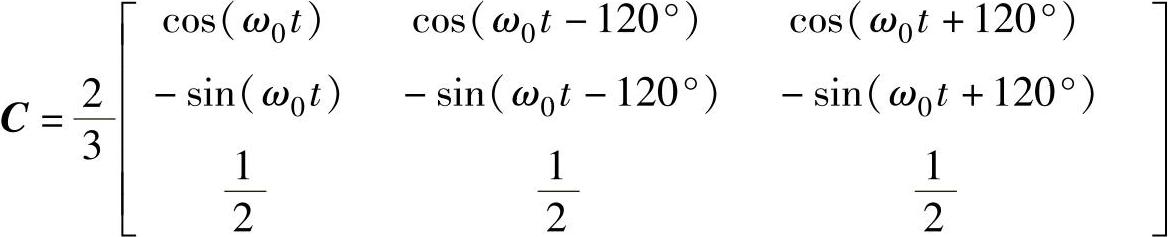 。
。
将式(6-47)、式(6-48)代入式(6-46)中可以得到dq两相旋转坐标系中的电压平衡方程为式(6-49),对应传递函数的框图如图6-32所示。

由以上公式和传递函数框图可以看出,d轴电流与q轴电流的大小都会受到彼此的影响,不能够实现完全的解耦控制。现引入变量Δud、Δuq并满足式(6-50):

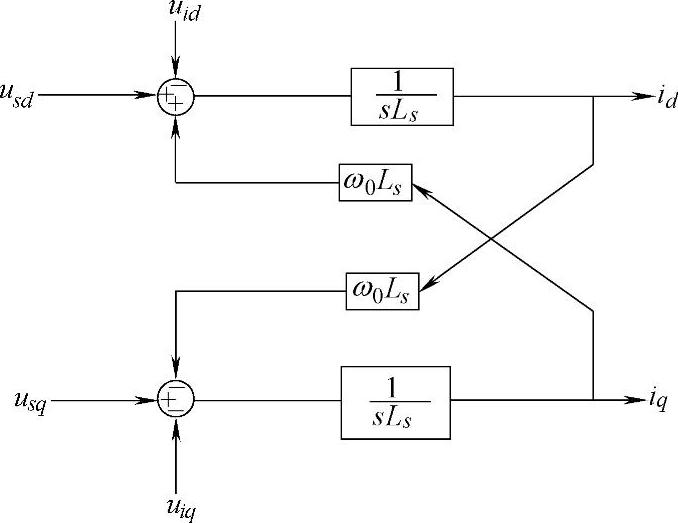
图6-32 STATCOM在dq坐标系下的传递函数框图
为实现对d轴电流与q轴电流的稳态无差跟踪控制,在实际的控制中,采用比例积分控制方式。因此可定义式(6-51):
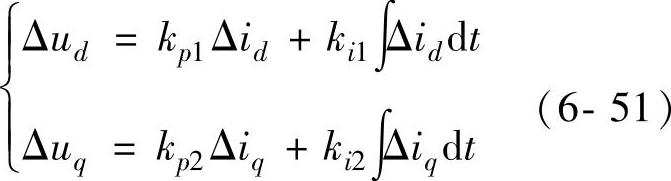
式中,Δid=id-id_ref;
Δiq=iq-iq_ref;
id_ref为STATCOM输出电流d轴分量的参考值;
iq_ref为STATCOM输出电流q轴分量的参考值;
kp1、kp2、ki1、ki2为dq轴电流PI控制器的比例、积分常数。
将式(6-51)代入式(6-50)可得到式(6-52):

由此可实现STATCOM输出dq轴电流的完全解耦,控制框图如图6-33所示。
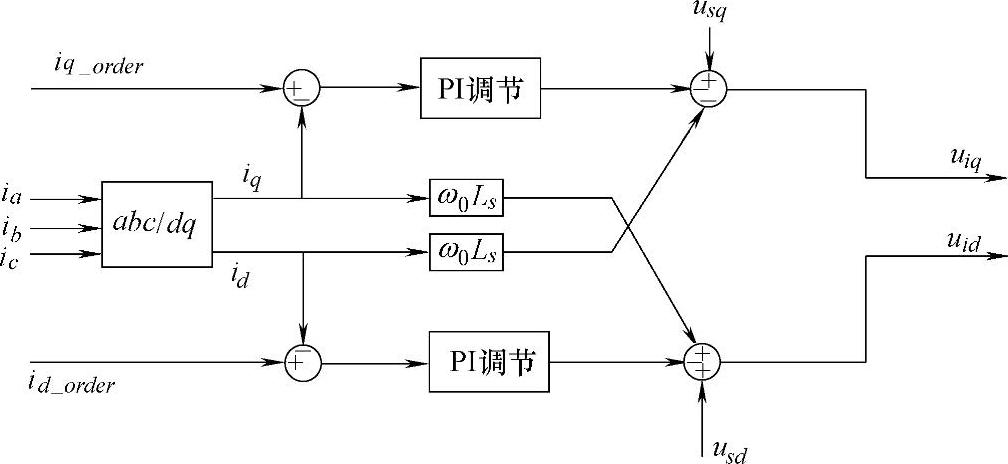
图6-33 dq解耦后STATCOM的控制框图
dq坐标下的控制原理如图6-34所示,电流的参考方向为由系统流向换流器,当系统电压三相平衡时,由变换矩阵C得到的系统电压dq分量中只含有d轴分量,因此系统电压的空间相量位于d轴上。系统与STATCOM之间的有功功率P由系统电压Us与电流的d轴分量Id决定,即 。系统与STATCOM之间的无功功率Q由系统电压Us与电流的q轴分量Iq决定,即
。系统与STATCOM之间的无功功率Q由系统电压Us与电流的q轴分量Iq决定,即 。当控制无功电流使得Iq>0时,无功电流超前系统电压90°,系统向STATCOM提供容性无功功率,也就是说STATCOM向系统输出感性无功功率。当控制无功电流使得Iq<0时,无功电流滞后系统电压90°,系统向STATCOM提供感性无功功率。由此可以通过控制电流的q轴分量,控制系统与STATCOM之间的无功功率交换。同理,控制电流的d轴分量,可以控制系统与STATCOM之间的有功功率交换。由此,可以实现STATCOM与系统之间有功与无功的解耦控制。
。当控制无功电流使得Iq>0时,无功电流超前系统电压90°,系统向STATCOM提供容性无功功率,也就是说STATCOM向系统输出感性无功功率。当控制无功电流使得Iq<0时,无功电流滞后系统电压90°,系统向STATCOM提供感性无功功率。由此可以通过控制电流的q轴分量,控制系统与STATCOM之间的无功功率交换。同理,控制电流的d轴分量,可以控制系统与STATCOM之间的有功功率交换。由此,可以实现STATCOM与系统之间有功与无功的解耦控制。
6.4.3.2 抑制SSO的附加控制策略
目前采用的STATCOM主要用于电压支撑和无功补偿,其控制目标通常为接入点的系统电压或系统中某条线路的无功功率。对于这种接线及控制方式的STAT-COM,仅仅依靠常规的电压控制是不能够为系统在次同步振荡过程中提供足够的正阻尼,需采用附加的控制方式对次同步振荡加以抑制。
目前文献中所使用的附加控制策略,一种是附加次同步振荡阻尼控制,另一种为次同步电流反注入控制。下面分别对这两种控制策略进行介绍。
1.附加次同步振荡阻尼控制策略
附加次同步振荡阻尼控制框图如图6-35所示,其中Us为STATCOM接入点系统电压的有效值,Us_ref为接入点系统电压参考值,γ为STAT-COM输出基波电压与接入点系统电压之间的相位,S(ωm)为含有发电机轴系扭振频率的电气量,如发电机转速、发电机输出功率或通过STATCOM接入点的相关电气量计算获得。
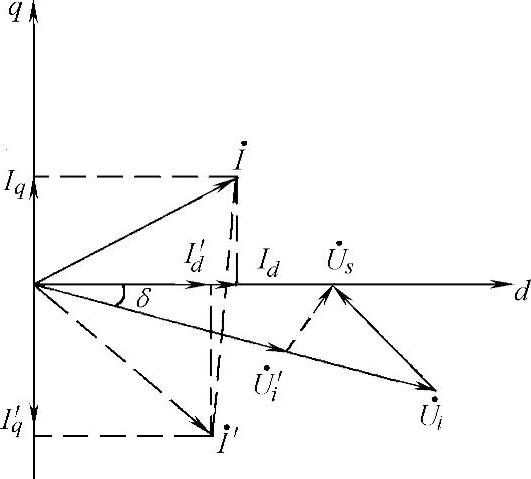
图6-34 STATCOM在dq坐标下的控制相量图(https://www.xing528.com)
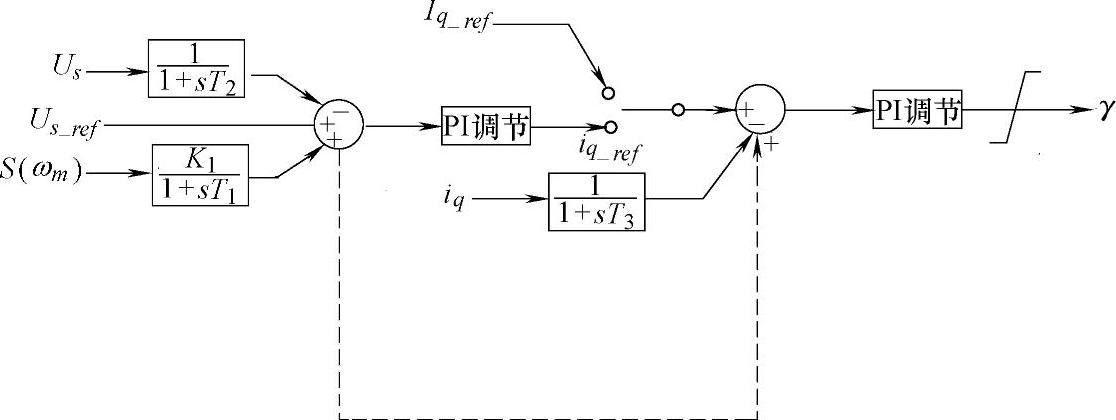
图6-35 附加次同步振荡阻尼控制框图
在未发生次同步振荡时,该控制策略可运行于两种工作模式:
1)电压调节模式。在这种模式下,控制器以接入点电压偏差作为输入信号,经PI调节形成q轴电流控制信号的指令值iq_ref,通过与实际测量到的STATCOM与系统间交换的电流q轴分量做差再经PI调节后形成控制角γ。STATCOM通过控制其与系统间交换的无功功率来调节其接入点的系统电压。
2)无功控制模式。在这种模式下,q轴电流控制信号的指令值为Iq_ref,由指定输出的无功功率值决定,而不再由电压调节器产生,STATCOM的无功输出量为常数。在某些情况下,为了保持系统中某条线路的无功功率,也可以计算出该线路相应电流的q轴分量取偏差经PI调节后,形成STATCOM输出的电流q轴分量指令值。
当系统中存在次同步振荡问题时,通过引入含有相应发电机轴系扭振频率的电气量,调节STATCOM与系统之间的无功功率的大小,通过调节接入点的系统电压来微调发电机的电磁功率,从而达到抑制次同步振荡的作用。由图6-35可以看出,用于抑制次同步振荡的附加控制量既可以加到外环的电压控制环节中,又可以直接作为内环的q轴电流参考值[21-23]。
2.次同步电流反注入控制策略
图6-36所示控制策略以STATCOM接入点的系统电压偏差量作为q轴的外环输入信号,经PI调节后形成STATCOM输出电流q轴分量的参考值,与实际电流的q轴分量取差值。其中,实际电流的q轴分量包括两项,一项为STATCOM与系统之间的交换电流q轴分量iq,另一项为线路中次同步电流q轴分量ilq_sub;以STATCOM直流侧电容电压偏差量作为d轴的外环输入信号,经PI调节后形成STATCOM输出电流d轴分量的参考值,与实际电流的d轴分量取差值。其中,实际电流的d轴分量包括两项,一项为STATCOM与系统之间的交换电流d轴分量id,另一项为线路中的次同步电流d轴分量ild_sub。
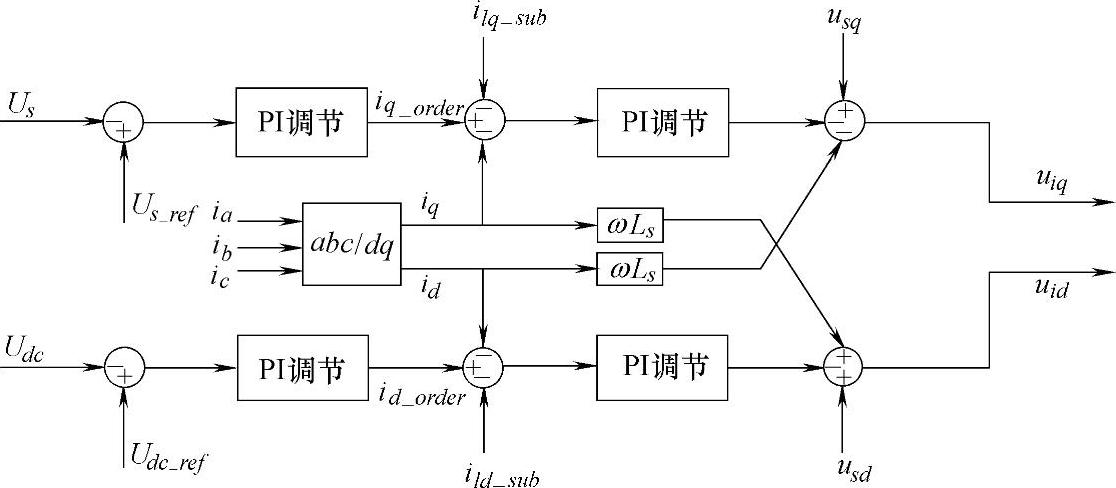
图6-36 次同步电流反注入控制策略框图
通过这种控制方式实现以下三个功能:
1)当接入点系统电压发生波动时,通过调节STATCOM与系统之间的基波无功功率交换量的大小维持系统电压在某一恒定值。
2)当STATCOM直流侧电容电压出现波动时,通过调节其与系统之间的基波有功功率交换量的大小维持直流侧电压的稳定。
3)当系统发生次同步振荡时,一方面通过控制基波无功功率的大小调节接入点的电压,另一方面通过注入与线路电流反相的次同步电流分量来阻止其进入发电机,起到抑制次同步振荡的作用。
其中线路的次同步电流dq轴分量可通过图6-37所示方法获得。由于在abc三相坐标系中,线路中的次同步电流频率与相应发电机组的轴系扭振频率互补,因此,为获取线路电流中对应的发电机轴系扭振频率,需要将三相坐标系下的电流转换为同步旋转坐标系下的电流。若所含有的模态频率数为n,共需2n个滤波器,即每个模态频率均需要2个带通滤波器,分别过滤出线路电流d轴和q轴分量中的相应模态频率量,其中带通滤波器的中心频率为相应的模态频率,带宽通常为2~5Hz。各模态频率dq轴分量分别经过比例放大后,重新叠加到一起,形成控制器所需要的dq轴次同步分量[24,25]。
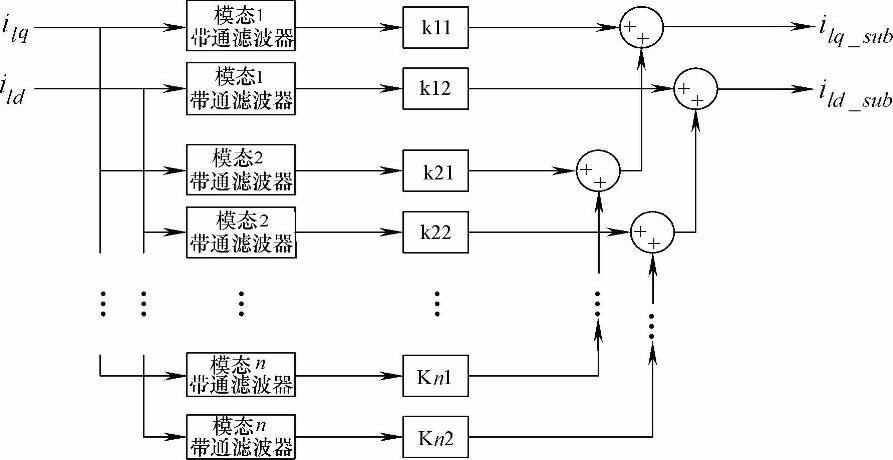
图6-37 线路次同步电流dq轴分量提取框图
6.4.3.3 仅用于抑制SSO的控制策略
上面介绍的两种控制策略均是在无功补偿为主要功能的基础上附加次同步控制环节,为获得较好的无功补偿和线路电压支撑作用,补偿装置通常接于线路中间。这种接入方式虽然对与接入点所在线路相连的机组的次同步振荡都有抑制能力,但抑制效果有限,当系统中发生较为严重的故障时,这种STATCOM均以电压和无功支撑为第一目标;对于系统中已投运的STATCOM装置,对其附加次同步控制是一种经济、简便的抑制SSO的方式,但对于存在严重SSO问题的多机复杂系统,这种方式就可能存在抑制能力有限,抑制效果不理想等问题,因此采用电厂或机组与SSO抑制装置一对一的控制模式可能成为今后解决次同步振荡问题的有效方式。
1.仅用于抑制SSO的三相分相控制
仅用于抑制SSO的三相分相控制如图6-38所示,待研发电机组的转速偏差信号经过模态滤波、移相和比例放大后形成受控的模态信号,通过与移相的基波同步电压相乘直接形成所需的三相次同步及超同步电流作为内环电流控制的参考值之一,用于阻尼发电机的次同步振荡;直流侧电压的偏差量经过PI环节后,与基波同步电压相乘,形成内环电流的另一参考值,用于稳定或平衡直流电压。由于这一方法在所提取的模态信号与同步电压信号中均能够引入移相环节,因此存在两个可控的变量。根据式(6-44),可通过选择适当的移相角度使得STATCOM输出的次同步及超同步电流进入发电机后各自提供最大的正阻尼。
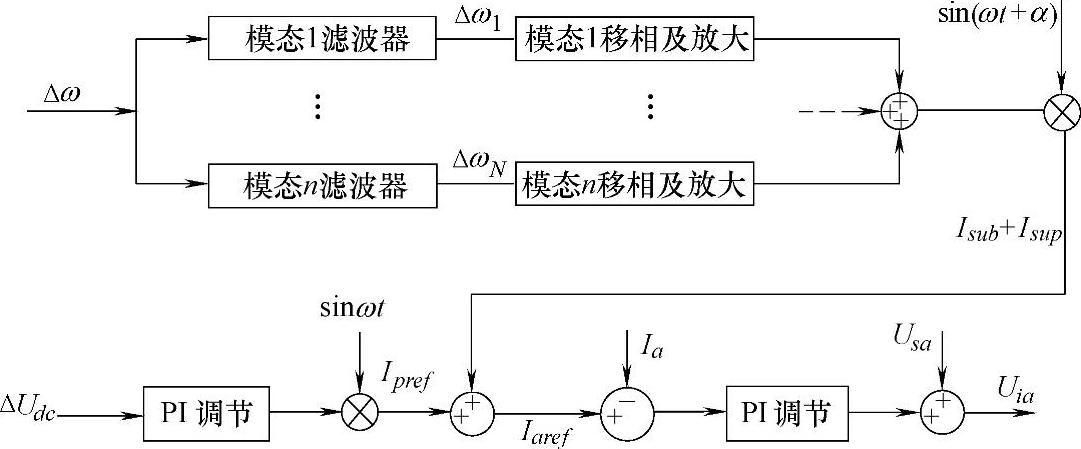
图6-38 仅用于抑制SSO的STATCOM三相分相控制策略的单相示意图
2.仅用于抑制SSO的dq解耦控制
图6-39所示是一种用于抑制次同步振荡的STATCOMdq解耦控制方法。这种控制仍然建立在dq坐标系下。与上节次同步电流反注入控制策略相同,它也采用直流侧电容电压偏差作为控制器d轴分量的输入信号,经PI调节后形成内环d轴电流的指令值,再经过STATCOM在dq坐标下的数学模型处理,形成调制波信号的d轴电压分量,通过改变STAT-COM与系统之间的有功功率交换的大小调节直流侧电容电压,使其保持恒定。
与上述三相分相控制相同,该类型的STATCOM在控制器的q轴外环输入信号中不引进接入点的系统电压控制或无功功率控制的受控量,只以发电机的转速偏差作为输入量。通过模态滤波从转速偏差信号中分离出相关的发电机轴系扭振模态频率,经移相和放大后形成STATCOM输出电流的q轴分量参考值,再根据STATCOM在dq坐标下的数学模型,形成调制波信号的q轴电压分量。这种控制方式将发电机的模态振荡转化成为对应的STATCOM输出电流q轴分量,当给定参数合适时,STATCOM输出电流的q轴分量可以完全跟踪其参考值,从而形成了用于抑制次同步振荡的电流[26]。这种方法在整个控制回路中都采用发电机的轴系扭振频率分量参与控制,形成调制波时再通过统一的dq-abc变换矩阵产生相应的次同步及超同步分量,由于可控变量仅有转速偏差的移相角度,因此需通过满足式(6-45)使得STATCOM提供最大的正阻尼。
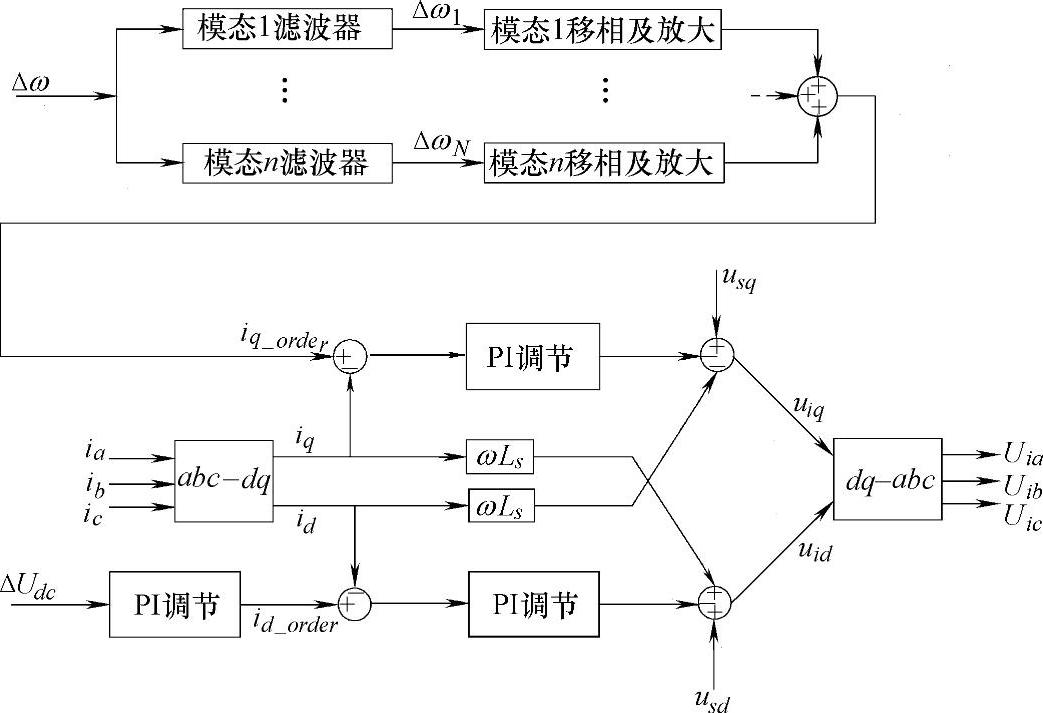
图6-39 仅用于抑制次同步振荡的STATCOMdq解耦控制框图
无论是三相分相控制还是dq解耦控制,这种仅用于抑制次同步振荡的控制策略在系统中未发生次同步振荡时,由于转速偏差量为零,STATCOM输出电压中几乎只有基波电压,且其输出的基波电压的大小近似等于接入点的系统电压,由6.4.2节的分析可知,STAT-COM与系统之间仅有用于补偿由开关损耗引起的直流侧电容电压跌落的较小的有功功率,即在未发生次同步振荡时,处于零无功功率运行,装置的静态损耗较小。
与上节提出的两种控制策略相比较,仅用于抑制SSO的控制方法具有以下优点:
1)由于抑制装置接于发电机端或发电机升压变压器的高压侧,其注入发电机的次同步电流较大(在非谐振系统中也有较大的超同步电流),抑制效果较好。
2)由于抑制装置距发电机较近,采用一对一的保护方式,方便以发电机的相关量作为输入信号,准确提取相应的不稳定模态,抑制效果较好。
3)在仅用于抑制次同步振荡的控制器中,次同步分量控制方式简单,不利的交互影响较小,便于实现与参数整定。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。