



3.5.3.1 特征根分析法基本原理
特征根分析法又称模态分析法,其基本模型、概念和方法见3.2节内容,是通过建立系统的小扰动线性化模型,求解特征根、特征向量等来分析系统的动态响应的方法。
特征根分析法是控制理论中最基础的分析方法,构成了动态系统分析的理论基础,是校验其他分析方法正确性的基本工具,其优点是理论严密,物理概念清晰,分析准确度高,可得到大量有用信息,容易进行控制对策研究,通过比较控制对策施加前后特征根的变化确定其效果,而且有多种通用的特征根分析软件工具,便于分析工作的开展。
特征根分析法是小扰动分析方法,可以用于分析除暂态转矩放大作用之外的各种SSO问题,对于简单系统非常有效,在次同步振荡研究中已经得到了广泛应用,一般在工程上可将多机系统化简后用特征根法进行分析。
但是,特征根分析法用于次同步振荡分析也存在明显的缺点。首先是,存在严重的“维数灾”问题,因为次同步振荡涉及发电机轴系,而n质量块轴系模型的动态方程为2n维,使其“维数灾”问题有时比低频振荡分析中还严重,并且随着现代电力系统的规模越来越大,该问题愈加突出,因此特征根分析法一般只能计算小系统。还有,特征根分析法只能得到若干孤立点(特征根相应频率处)的动态特性,不能进行连续频率的特性分析,而且特征根与元件参数、运行参数的关系难以进行显式表达,因此振荡机理的物理透明度低,不利于机理分析和控制策略研究。另外,特征根计算要求有准确的系统和轴系参数,这大大限制了其应用。
3.5.3.2 特征根分析法算例
本节以IEEE第一标准模型(IEEE First Benchmark Model)为例,用特征根法分析其次同步振荡特性。IEEE第一标准模型由IEEE次同步谐振工作组于1977年提出,其系统结构如图3-16所示,各绕组参数、转子轴系模型参数、自然振荡频率等参数见附录A。

图3-16 IEEE第一标准模型
1.电网模型及参数
设ud、uq分别为发电机端电压的d轴和q轴分量,uCd、uCq分别为串联电容器两端电压的d轴和q轴分量,u0d、u0q分别为无穷大母线的d轴和q轴分量,id、iq分别为线路电流的d轴和q轴分量。记R=RT+RL,X=XT+XL+XS,系统在dq坐标系下的线性化方程为

式中, ,时间t的单位取s,其他变量均采用标幺值表示。设δ是以无穷大母线电压相量为参考时发电机转子q轴的角度,则u0d与u0q的表达式为
,时间t的单位取s,其他变量均采用标幺值表示。设δ是以无穷大母线电压相量为参考时发电机转子q轴的角度,则u0d与u0q的表达式为

对其进行线性化处理后,可得

在dq坐标系下,串联电容器的电压与电流的关系式经线性化处理后,可得

2.同步发电机模型及参数
同步发电机的磁链和电压方程如式(2-3)、式(2-4)、式(2-5)和式(2-6)所示,同步发电机参数如表3-3所示,各符号含义参见第2章。
表3-3 同步发电机参数(pu)

3.转子轴系模型及参数
转子轴系模型如图2-15所示,将式(2-43)所示的轴系运动方程在初始运行点上线性化后,得到以下方程:

式中各符号含义同式(2-43)。质量块5对应于发电机转子轴段,故有Δδ5=ΔδG,Δω5=Δω,ΔT5=-ΔTe;质量块6对应于励磁机转子,假定ΔT6=0;并且K0,1=K6,7=0,D0,1=D6,7=0。
4.汽轮机和调速器模型及参数
汽轮机的传递函数框图如图2-10所示,其线性化方程为(https://www.xing528.com)

调速器模型采用图2-11所示的汽轮机机械液压调速系统,进行小扰动分析时,可忽略限幅环节,再将图2-12所示的传递函数框图进行等效变换后,得到其线性化方程为式(3-56)。

汽轮机和调速器的参数如表3-4所示。
表3-4 汽轮机和调速器模型参数(pu)

5.励磁系统模型及参数
励磁系统模型采用如图2-6所示的IEEE ST1A励磁系统模型,其参数见表2-1。在表2-1中,由于TC=TB,TC1=TB1,TA=0,KF=0,所以串联的领先-滞后校正环节不起作用,并联的励磁电压软反馈不起作用,对模型进行整理可得到以下方程:
ΔEFD=-KAΔVt-KLRΔIFD (3-57)
式中,

6.全系统的状态方程
将式(3-48)~式(3-59)进行坐标变换及推导,消去中间变量,整理后可得到一组由25个一阶线性微分方程组成的方程组,它描述了图3-16所示电力系统的全部动态行为。系统的状态方程可合并写为

记为

式中,
 。
。
7.阻尼守恒与转移现象
定义串联补偿度kc为
kc=XC/XL (3-62)
式中,XC为工频下串联电容器C的容抗;XL为工频下的线路电抗。串联补偿度是影响SSO电气模态阻尼的主导因素,表3-5为kc取0.1、0.3、0.5时,系统的特征根。
表3-5 不同串联补偿度情况下的特征根
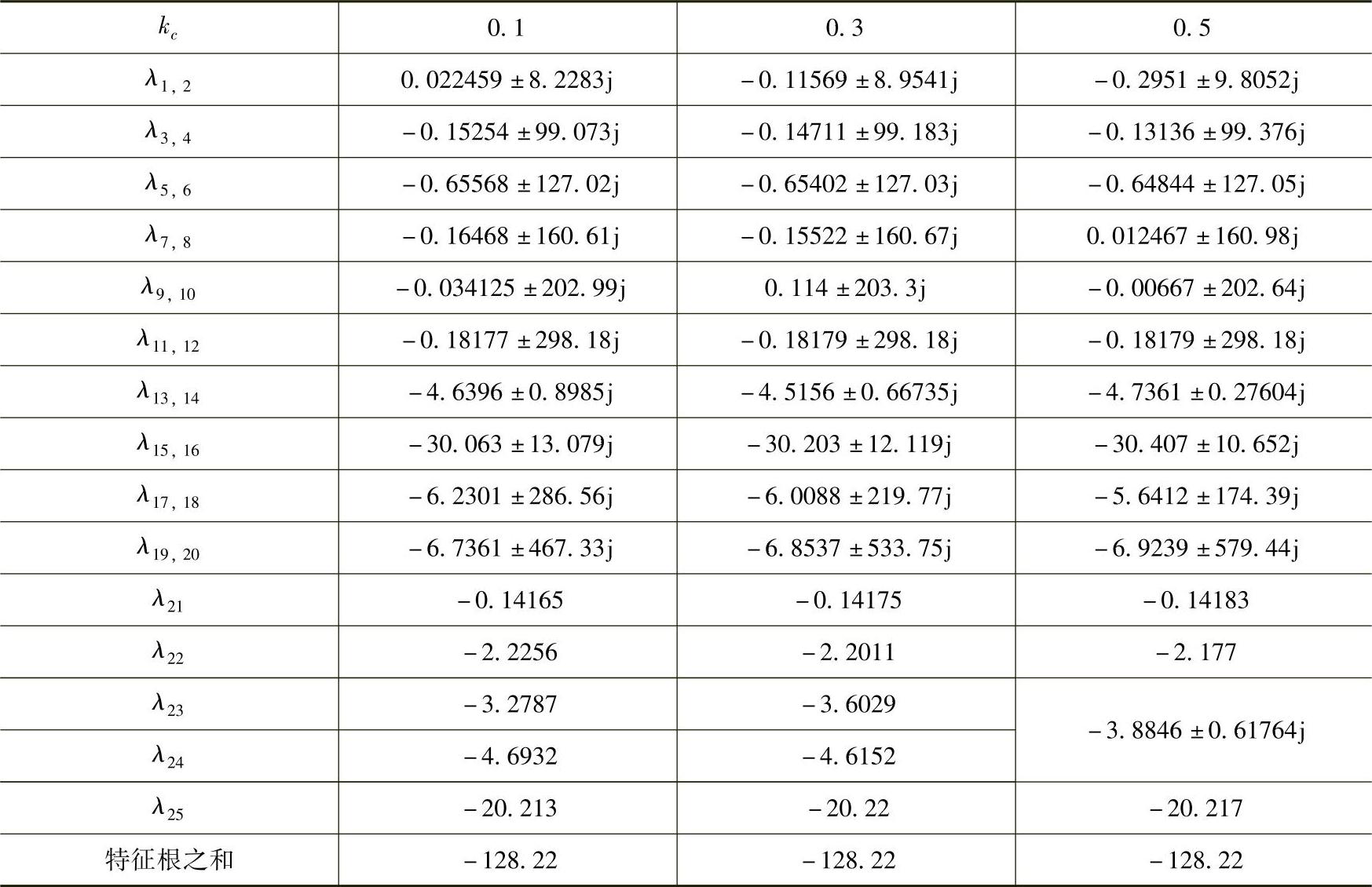
在表3-5中,λ1,2代表将整个转子看作刚体时的振荡模态,属于低频振荡模态;λ3,4~λ11,12分别代表轴系的次同步振荡模态1~模态5,对应的扭振频率分别是15.7Hz,20.2Hz,25.6Hz,32.3Hz,47.4Hz。
根据矩阵的基本性质,矩阵的迹,即其对角线之和等于其所有特征根之和,对于实矩阵就是其所有特征根的实部之和。由于特征根的实部体现了系统的阻尼,所以矩阵迹可以看作系统的总阻尼[16]。由表3-5可以发现,当串联补偿度kc改变时,系统所有特征根之和保持不变,也就是说,kc改变时系统总阻尼是守恒的。这一现象可通过分析式(3-51)、式(3-52)所示的串联电容器的状态方程来解释:因为参数XC只在这两个状态方程中出现,并且不出现在状态矩阵的对角线上,说明系统总阻尼与其无关,所以当串联补偿度kc改变时,系统总阻尼是守恒的。
由表3-5还可以看到,当kc变大时,电气阻尼会从低频振荡模式转移到次同步振荡模式上。当kc=0.1时,输电线路的总电抗较大,因此λ1,2的实部为正,对应的阻尼为负,系统中如果没有加装PSS就可能发生低频振荡。当kc增大为0.3、0.5时,相当于缩短了输电线路,增强了发电机与系统间的联系,因此λ1,2的实部均为负,系统不会发生低频振荡。而当kc=0.3时,λ9,10的实部为正,对应振荡频率为32.37Hz;kc=0.5时,λ7,8的实部为正,对应振荡频率为25.63Hz。这是因为随着kc的增大,电气系统的自然振荡频率fe也增大,其次同步互补频率fer=f0-fe相应减小,负阻尼转移到轴系频率较低的模态。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。