



【摘要】:机构的串联,是两个普通基本机构彼此以前置机构的从动件和后续机构的主动件直接固连成一体的组合。前置机构的从动轮2和后续机构的主动机构曲柄2′直接固连,两基本机构的组合方式为串联。机构串联组合也可用于实现某种特殊的运动要求。该机构系统利用两套机构的串联组合,实现了机构在极限位置的较长停顿,保证了链式线迹的形成。图5-28 链式平缝机的针杆机构a)机构简图 b)组合模式1~5—杆
机构的串联,是两个普通基本机构(自由度F=1)彼此以前置机构的从动件和后续机构的主动件直接固连成一体的组合。
图5-27a所示的机构系统是具有急回性质的机构系统,由一对椭圆齿轮机构1-2和正弦机构2′-3-4组成。前置机构的从动轮2和后续机构的主动机构曲柄2′直接固连,两基本机构的组合方式为串联。如用方框图的方式表达该组合方式,可用图5-27b所示的组合模式,连线箭头表示传动路线。
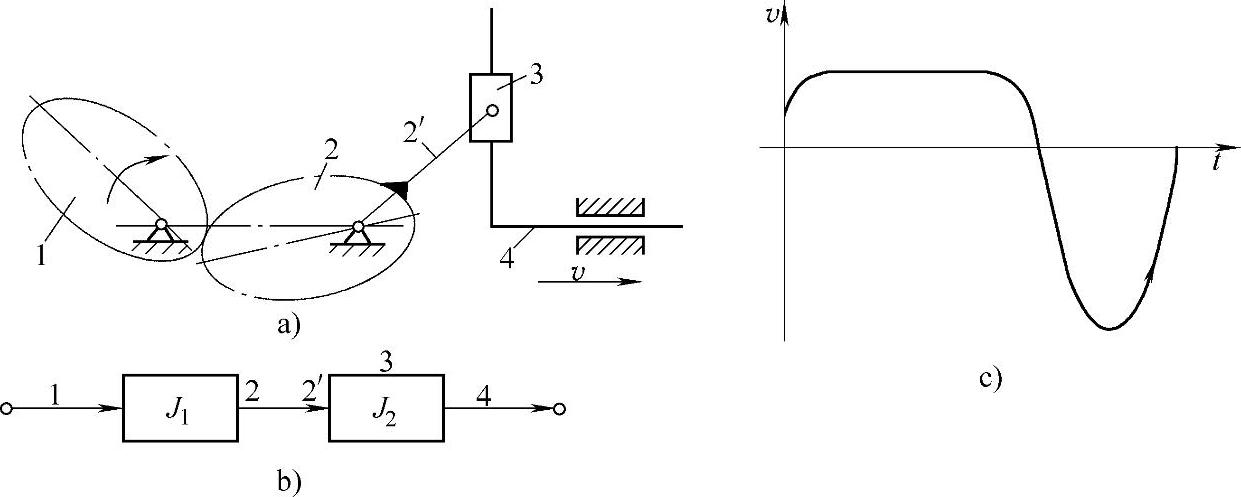
图5-27 具有急回特性的机构系统
a)结构简图 b)组合模式图 c)速度时间曲线
1—主动轮 2—从动轮 2′—曲柄 3—滑块 4—从动杆
机构串联组合的目的主要是改变传动特性。图5-27所示的机构系统中,正弦机构可实现急回运动,但工作行程速度不恒定。串联前置的椭圆机构后,就使从动杆4的工作行程段具有等速运动的特性。(https://www.xing528.com)
机构串联组合也可用于实现某种特殊的运动要求。如图5-28所示的链式平缝机的针杆机构,是一种空间RSSR机构和平面四杆机构的串联组合。该机构系统利用两套机构的串联组合,实现了机构在极限位置的较长停顿,保证了链式线迹的形成。
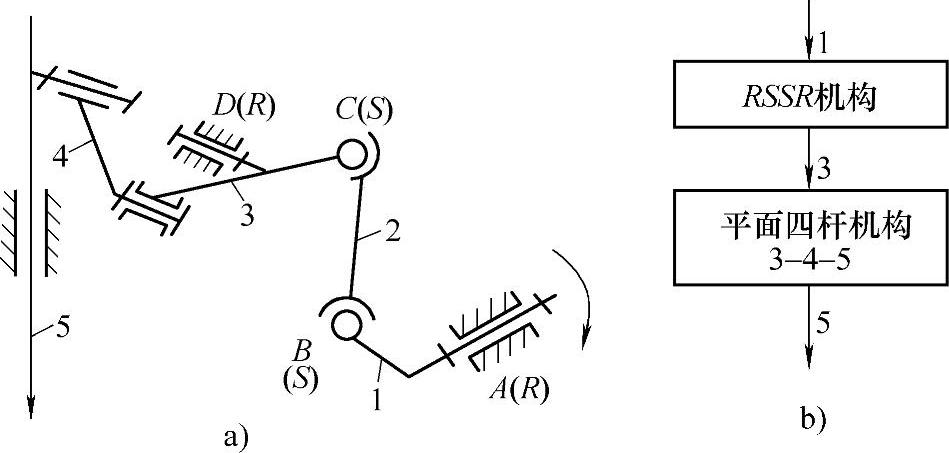
图5-28 链式平缝机的针杆机构
a)机构简图 b)组合模式
1~5—杆
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。