



工程应用最为广泛的调节器控制规律为比例-积分-微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象结构和参数不能被完全掌握,或无法做出精确数学模型时,系统控制器结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
换句话说,当我们不完全了解一个系统和被控对象时最适合用PID控制技术。
下面结合一个事例来说明什么是PID控制及其参数调节方法。需要说明的是,随着现代控制技术理论和元器件的进化,现在很多成品控制器自带的全自动整定工具已经可以满足许多常见应用,但是为了理解,我们还是从最简单系统的手动整定来说明。
假定有一系统,未经参数整定前的系统特性如图5-1-4所示。图中虚线是控制目标值。
1.比例(P)控制
上述系统在未整定前,输出远远没有达到控制目标。所以,第一步先关闭积分和微分控制,逐渐加大比例控制(Kp值)直至系统出现振荡,如图5-1-5所示。
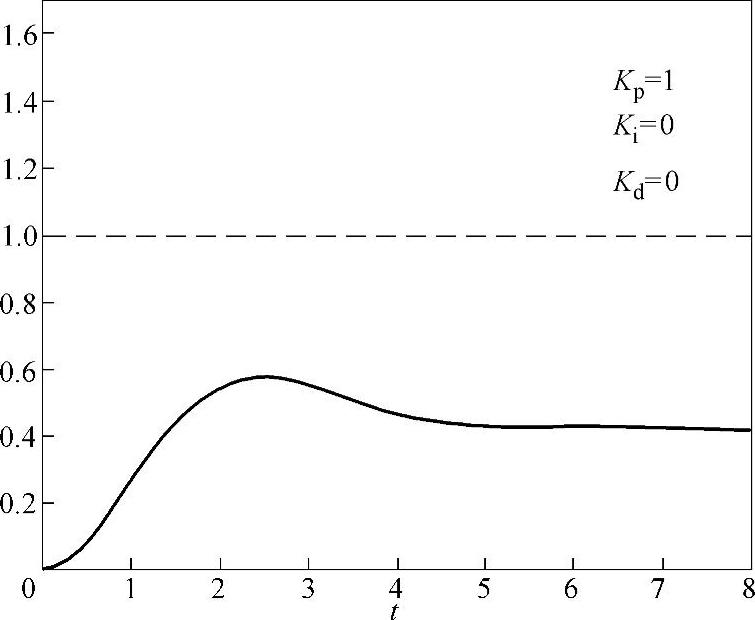
图5-1-4 未经整定的系统
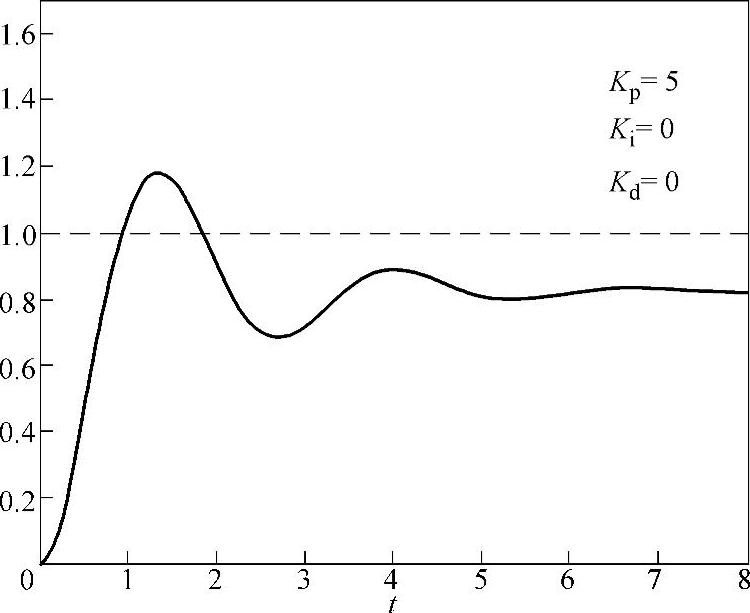
图5-1-5 比例(P)控制
比例控制是一种最简单的控制方式,其控制器输出与控制偏差成比例关系,也就是说,系统偏差一旦产生,控制器立即产生控制作用,以减小偏差。
比例作用越强,动态响应越快,消除误差的能力越强。但实际系统是有惯性的,控制输出变化后,实际值还需等待一段时间才会缓慢变化。所以比例作用不宜太强,否则会引起系统振荡不稳定。
当仅有比例控制时系统输出会存在稳态误差。(https://www.xing528.com)
2.积分(I)控制
接下来导入积分控制,消除稳态误差。
积分控制中,控制器输出与输入误差信号的积分成正比关系。只要有误差存在,就对误差进行积分,使输出继续增大或减小,一直到误差为零以后,积分停止,输出不再变化,达到无差调节的效果(图5-1-6)。
3.微分(D)控制
系统能达到稳定控制以后,就要追求动态特性的改善,即当有外部扰动时,系统能够快速恢复稳态。这时就要引入微分控制了。微分控制参数经过整定以后,系统特性如图5-1-7所示。
微分控制中,控制器输出与输入误差信号的微分(即误差变化率)成正比关系。
不论比例调节作用,还是积分调节作用,都是建立在产生误差后才进行调节以消除误差的,都是事后调节,因此这种调节对稳态来说是无差的,对动态来说肯定是有差的。对于负载变化或给定值变化,必须等待产生误差以后,再来慢慢调节予以消除。
但一般的控制系统,不仅对稳态控制有要求,而且对动态指标也有要求:通常都要求负载变化或给定调值变化后,恢复到稳态的速度要快。因此光有比例和积分调节作用还不能完全满足要求,必须引入微分作用。比例作用和积分作用是事后调节(即发生误差后才进行调节),而微分作用则是事前“预防”调节,即一发现输出有变大或变小的趋势,马上就输出一个阻止其变化的控制信号,以防止出现过冲或超调。
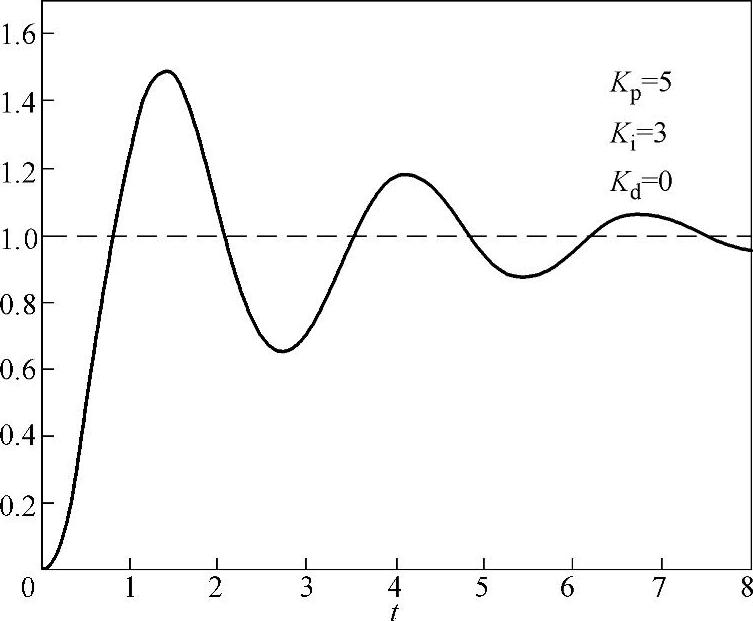
图5-1-6 比例-积分(PI)控制
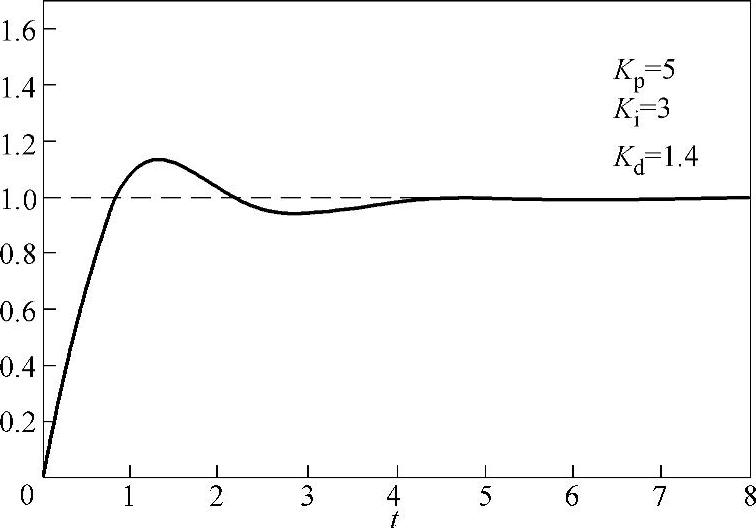
图5-1-7 比例-积分-微分(PID)控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。