



定义连杆运动仿真时,首先要定义连杆运动时各连接件绕相同的轴旋转的孔的约束关系,即“共轴”约束关系,然后定义固定的零件,即“固定”约束关系,最后定义连杆运动中工作件绕固定轴的运动轨迹。下面以连杆模型为例描述定义过程。
导入模型“样例文件\模型文件\连杆\4bar1.sldasm”,模型如图5-128所示。因为在后面定义过程中需要捕捉三维模型的特征点、线、面,所以在这里加载模型数据。
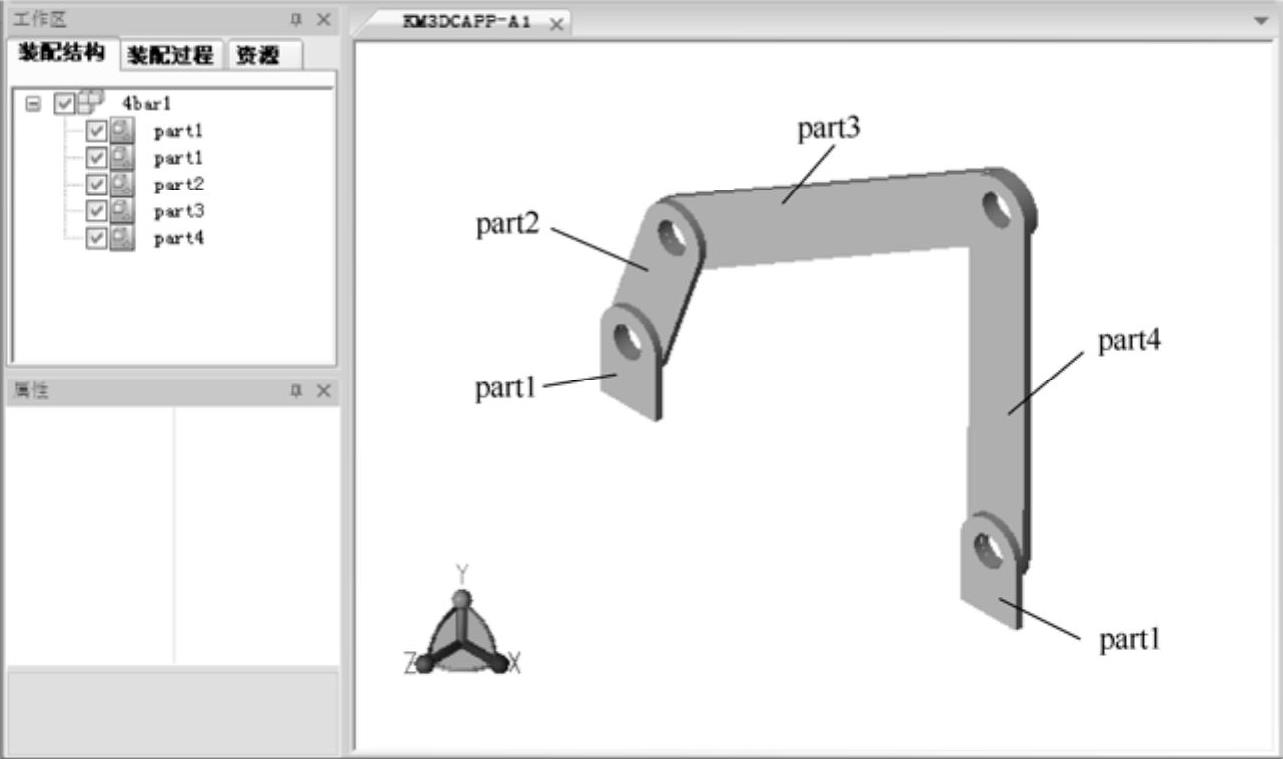
图5-128 连杆运动仿真模型
①规划工序和配套件:规划“步骤1”,加入所有零件为配套件。
②定义拆卸活动:选择“步骤1”节点,选择右键菜单中的【定义拆卸活动】命令,出现【轨迹定义】工具条,选择连杆运动中工作件,如图5-129所示。
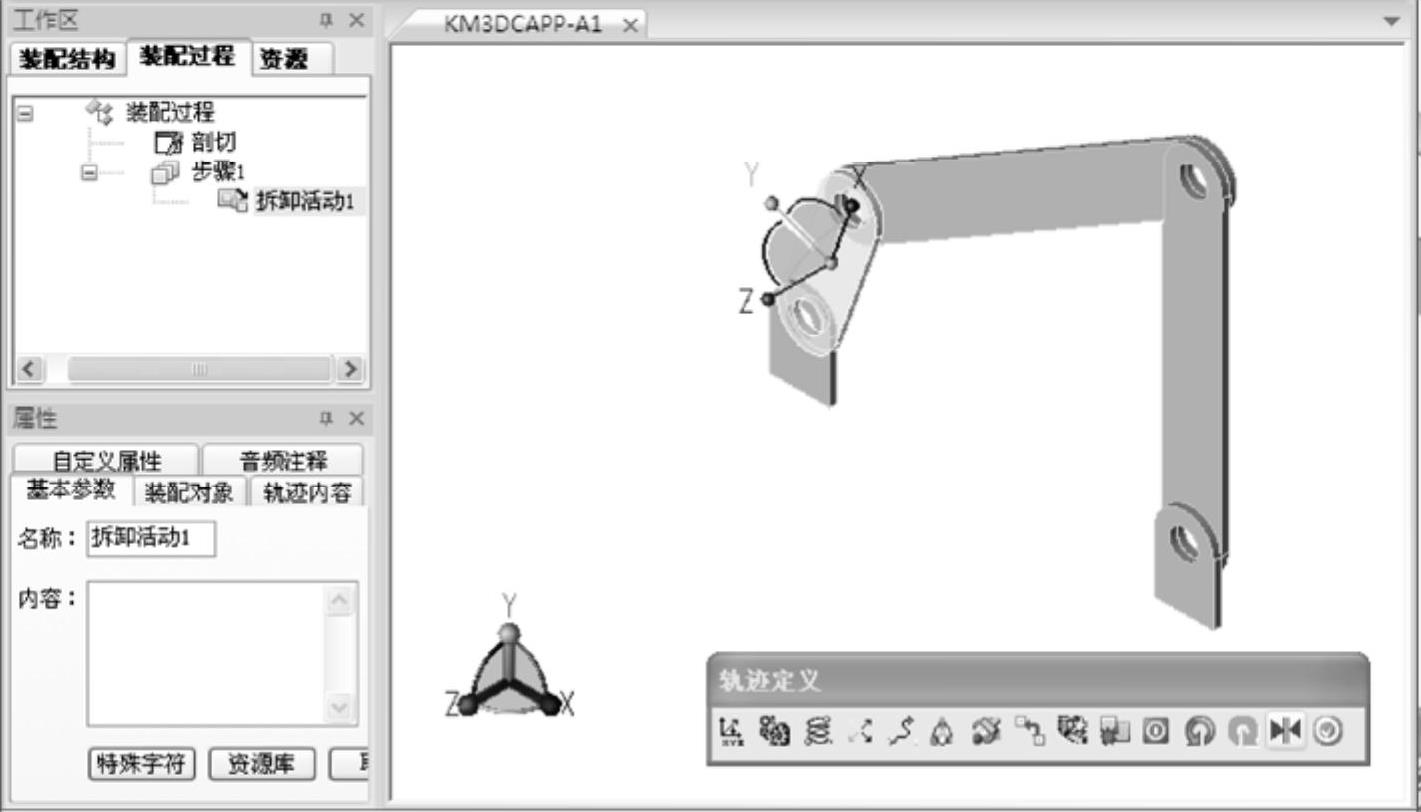
图5-129 选择连杆运动中工作件
③单击【轨迹定义】工具条上的按钮 ,弹出【添加运动仿真约束】对话框,在“约束关系”下拉列表框中选择“共轴”,如图5-130所示。
,弹出【添加运动仿真约束】对话框,在“约束关系”下拉列表框中选择“共轴”,如图5-130所示。
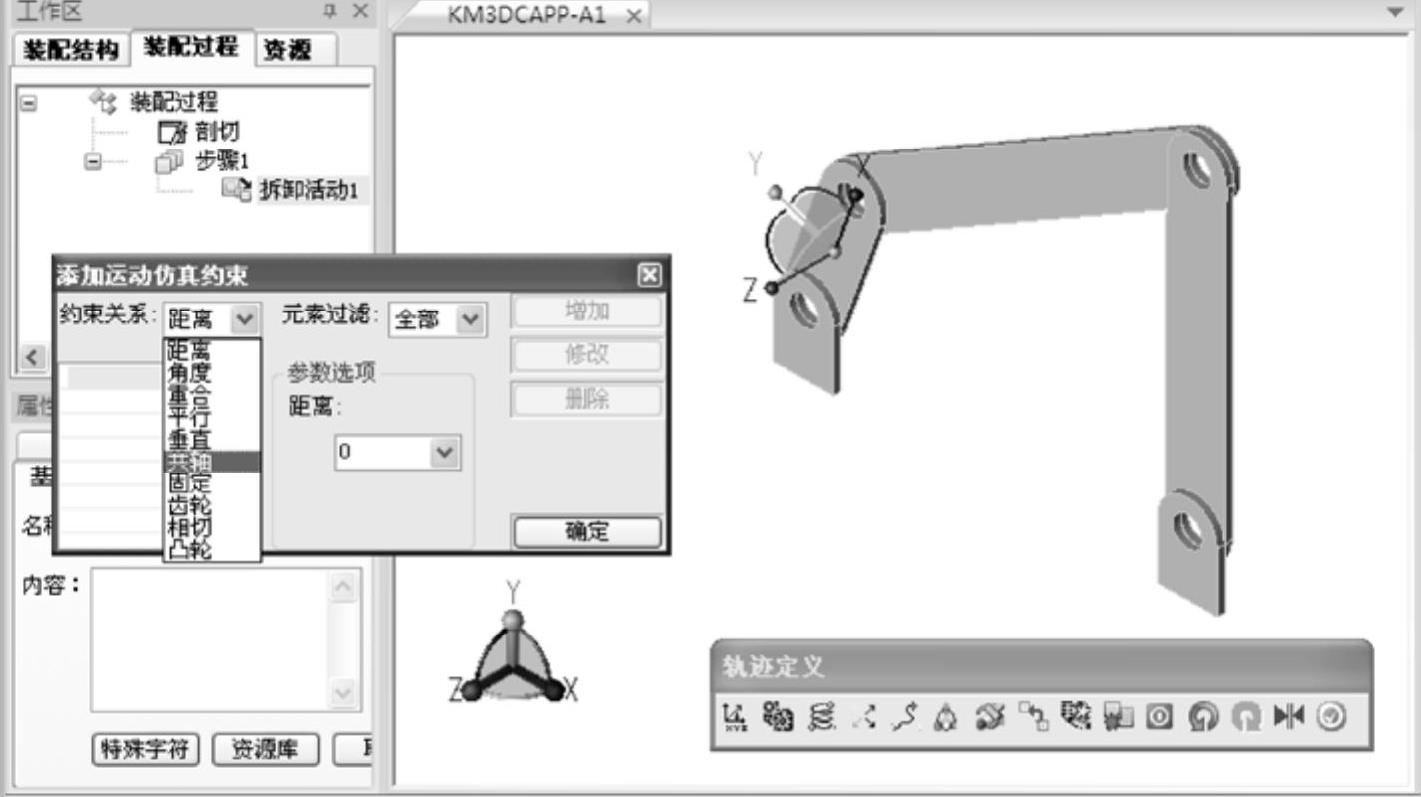
图5-130 选择约束关系中的共轴
④在三维模型视图区中,定义绕同一个轴旋转的两个孔面,选择左边“part1”零件的孔面,中心线加亮显示,如图5-131所示,单击鼠标左键。然后选择“part2”零件的孔面,中心线加亮显示,如图5-132所示,单击鼠标左键。在【添加运动仿真约束】对话框单击【增加】按钮,“共轴”约束关系增加完成。
⑤按同样的方法增加另外3个“共轴”约束关系,完成后的【添加运动仿真约束】对话框如图5-133所示。
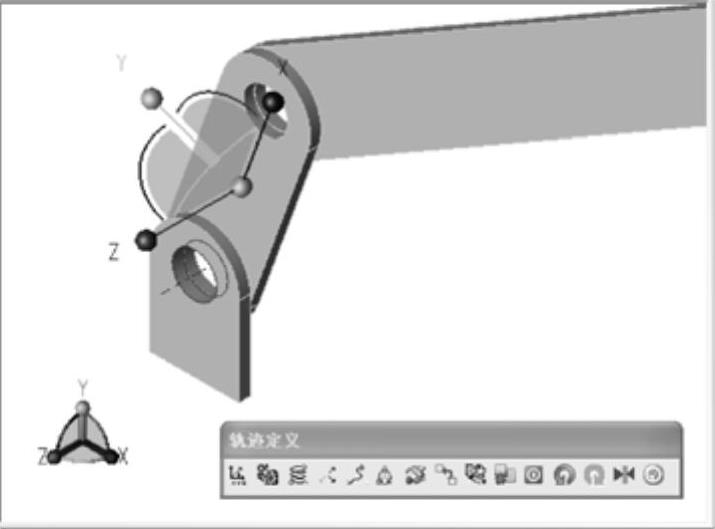
图5-131 选择左边“part1”零件的孔面
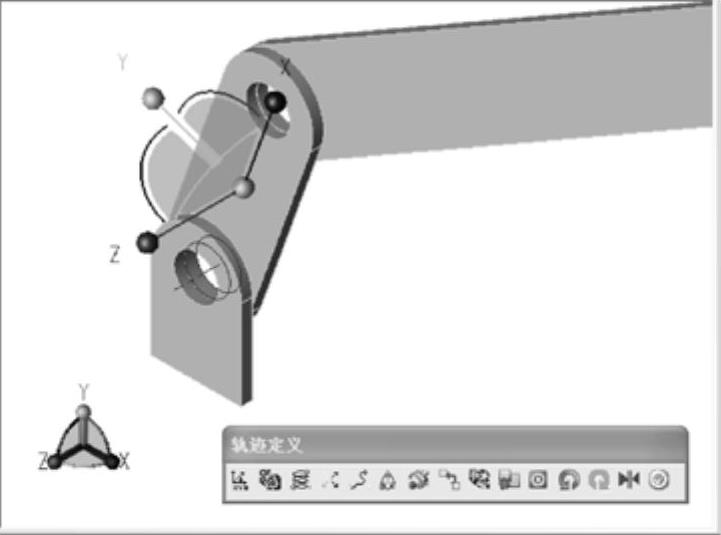
图5-132 选择“part2”零件的孔面
⑥“共轴”约束关系定义完成后,再定义“固定”约束关系,定义左边【part1】零件的面,该面加亮显示,如图5-134所示,单击鼠标左键,在【添加运动仿真约束】对话框中单击【增加】按钮,“固定”约束关系增加完成;用同样的方法定义右边“part1”零件的面为【固定】约束关系,如图5-135所示。所有约束关系定义完成后,【添加运动仿真约束】对话框如图5-136所示。(https://www.xing528.com)
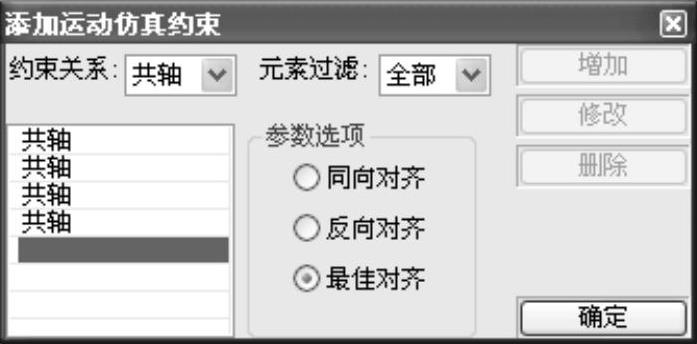
图5-133 定义了4个共轴的约束关系
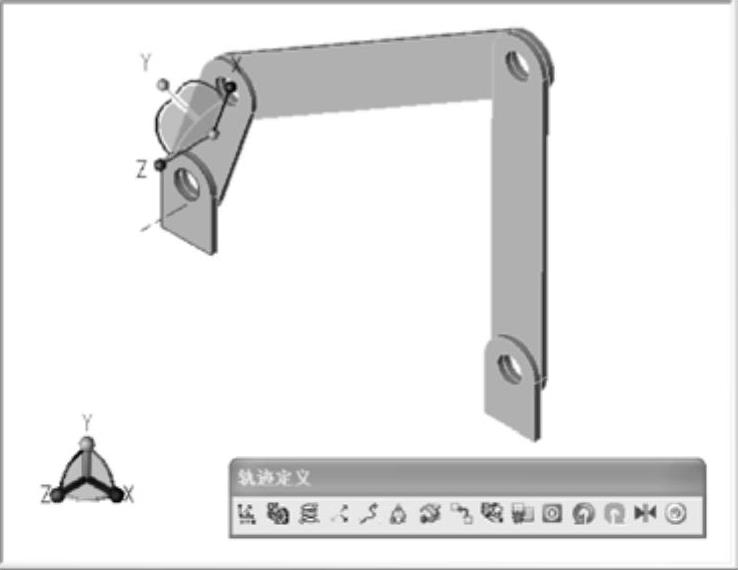
图5-134 选择左边“part1”零件的面
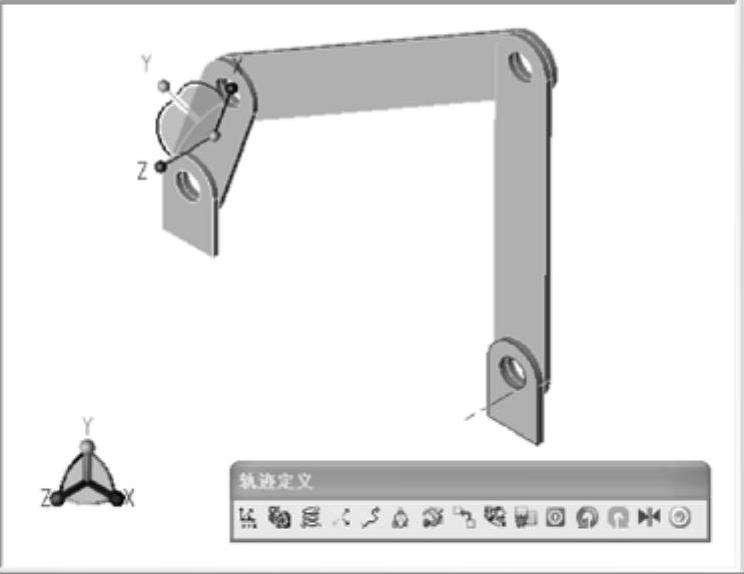
图5-135 选择右边“part1”零件的面
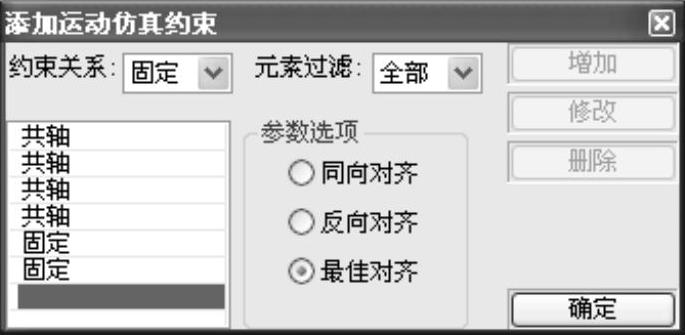
图5-136 定义了两个固定的约束关系
⑦“共轴”和“固定”约束关系定义完成后,需要定义连杆运动中主动的零件绕轴旋转的运动轨迹。定位夹在“part2”零件的中间,如果要定义“part2”绕“part1”和“part2”间的轴线旋转,需要将定位夹原点移到“part1”的孔的中线点。单击【轨迹定义】工具条中的按钮 ,选中定位夹原点,原点加亮显示,如图5-137所示,然后按住<Alt>键,将鼠标移动到“part1”的孔的上边缘,上圆弧将加亮显示且中心点显示出来,如图5-138所示,单击鼠标左键,定位夹原点移动到圆弧的中心点,如图5-139所示,再次单击【轨迹定义】工具条中的按钮
,选中定位夹原点,原点加亮显示,如图5-137所示,然后按住<Alt>键,将鼠标移动到“part1”的孔的上边缘,上圆弧将加亮显示且中心点显示出来,如图5-138所示,单击鼠标左键,定位夹原点移动到圆弧的中心点,如图5-139所示,再次单击【轨迹定义】工具条中的按钮 ,完成定位夹的定位。
,完成定位夹的定位。
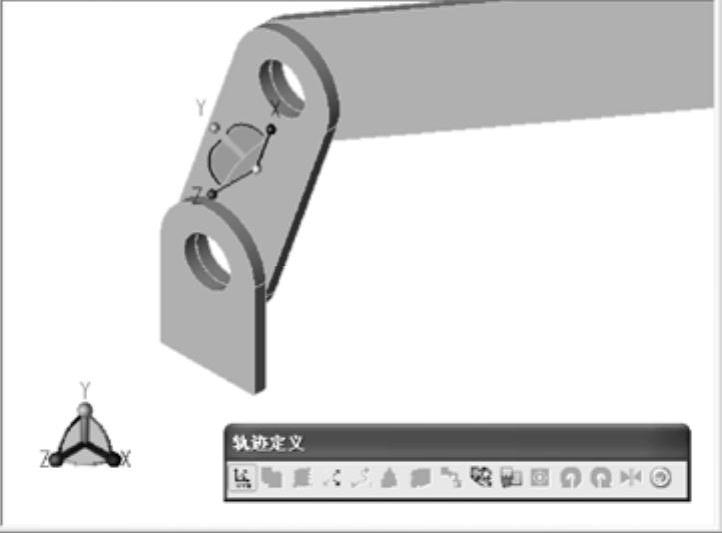
图5-137 选中定位夹原点
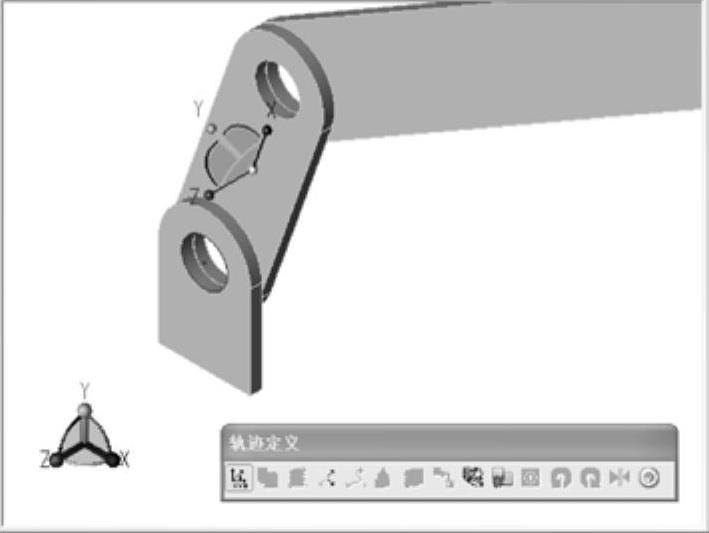
图5-138 圆弧的中心点显示出来
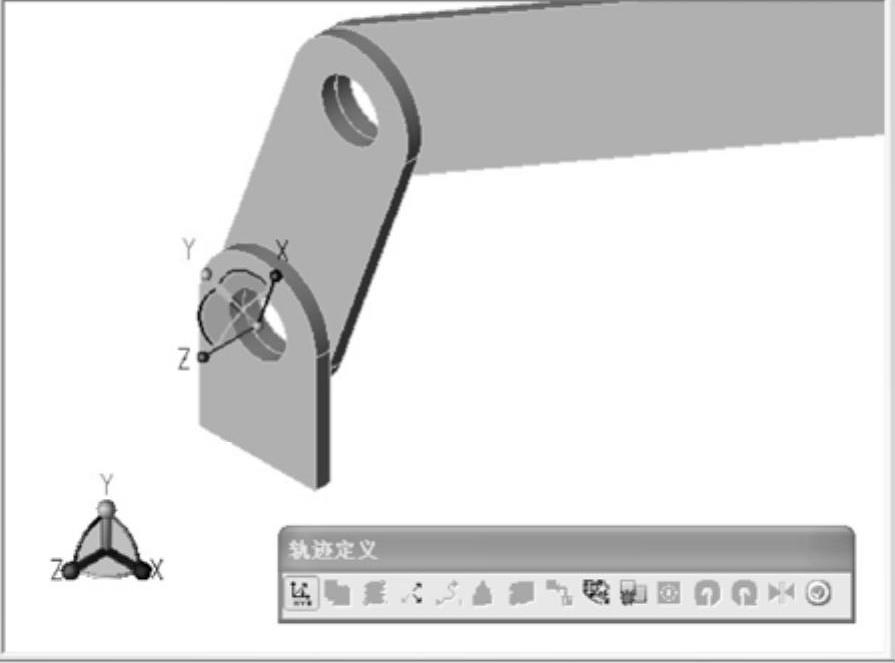
图5-139 定位夹原点移动到圆弧的中心点
⑧定义“part2”绕Z轴旋转:选中定位夹上X、Y轴间的红色圆弧,圆弧加亮显示呈白色,如图5-140所示,定义“part2”绕Z轴逆时针旋转几周,单击【轨迹定义】工具条中的按钮 ,完成定义。仿真播放效果如图5-141所示。
,完成定义。仿真播放效果如图5-141所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。