



将模型调整到图3-44所示方位,并在步骤节点上记录此观察方位。首先拆卸平键12×4、右端轴承,然后拆卸左端轴承、蜗杆。
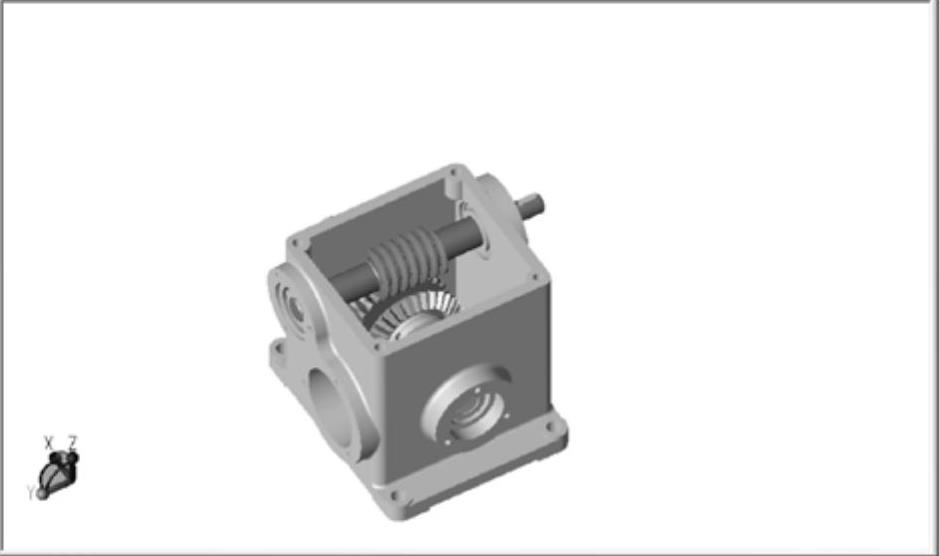
图3-44 调整模型方位
(1)定义平键12×4的运动(直线运动)
选择“平键12×4”,拆卸后的结果如图3-45所示。
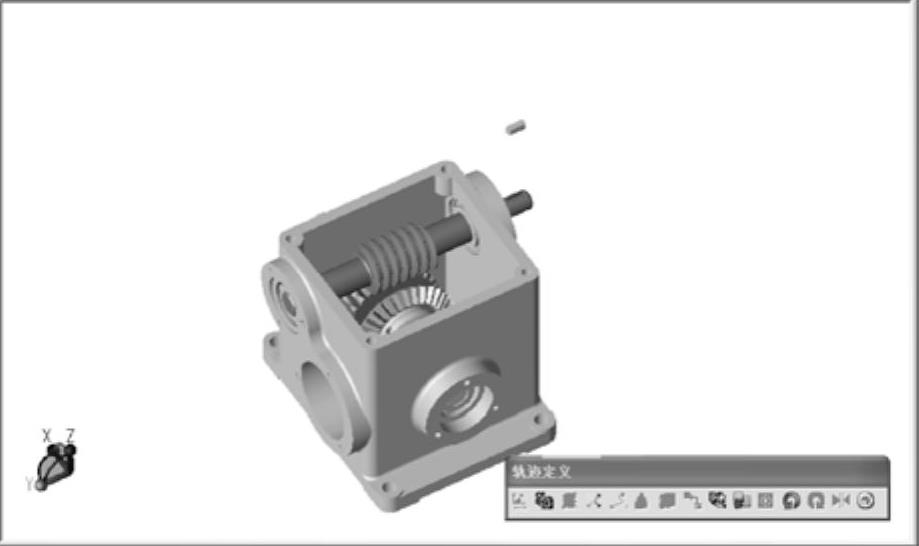
图3-45 定义平键12×4的运动
(2)定义右端轴承的运动
选择右端轴承,向箱体外移动到合适位置,如图3-46所示。
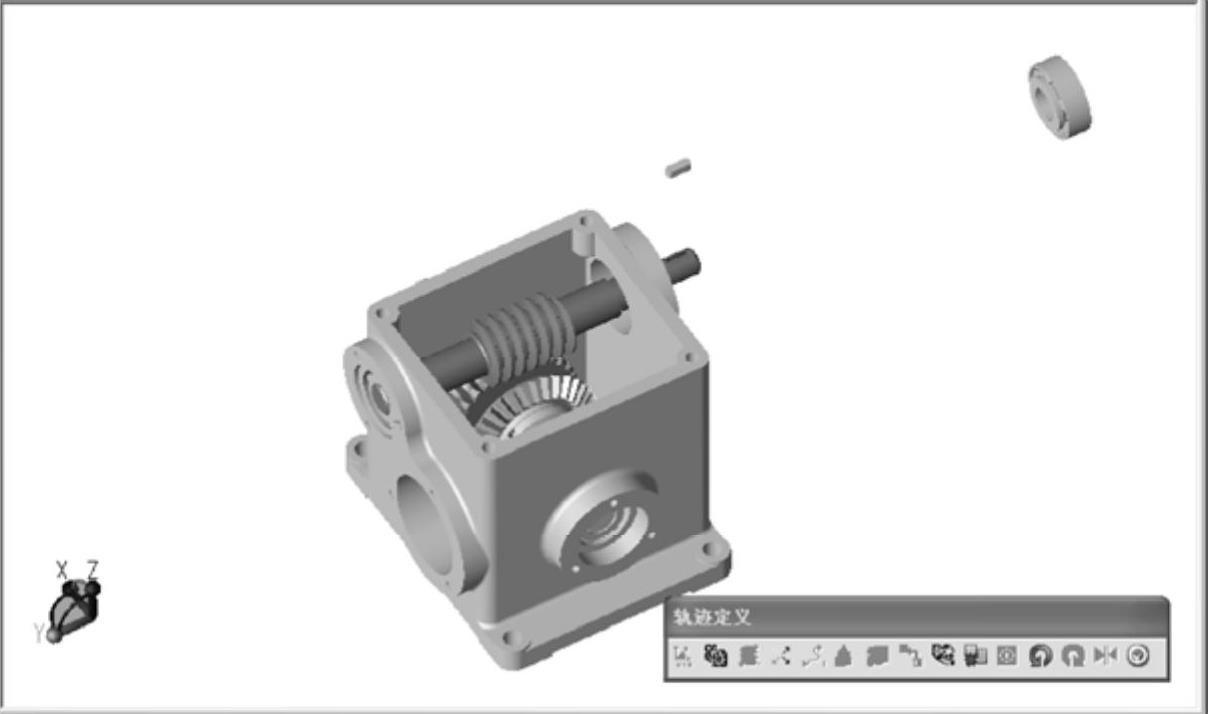
图3-46 定义右端轴承的运动
(3)定义左端轴承的运动
选择左端轴承,向箱体外移动到合适位置,如图3-47所示。
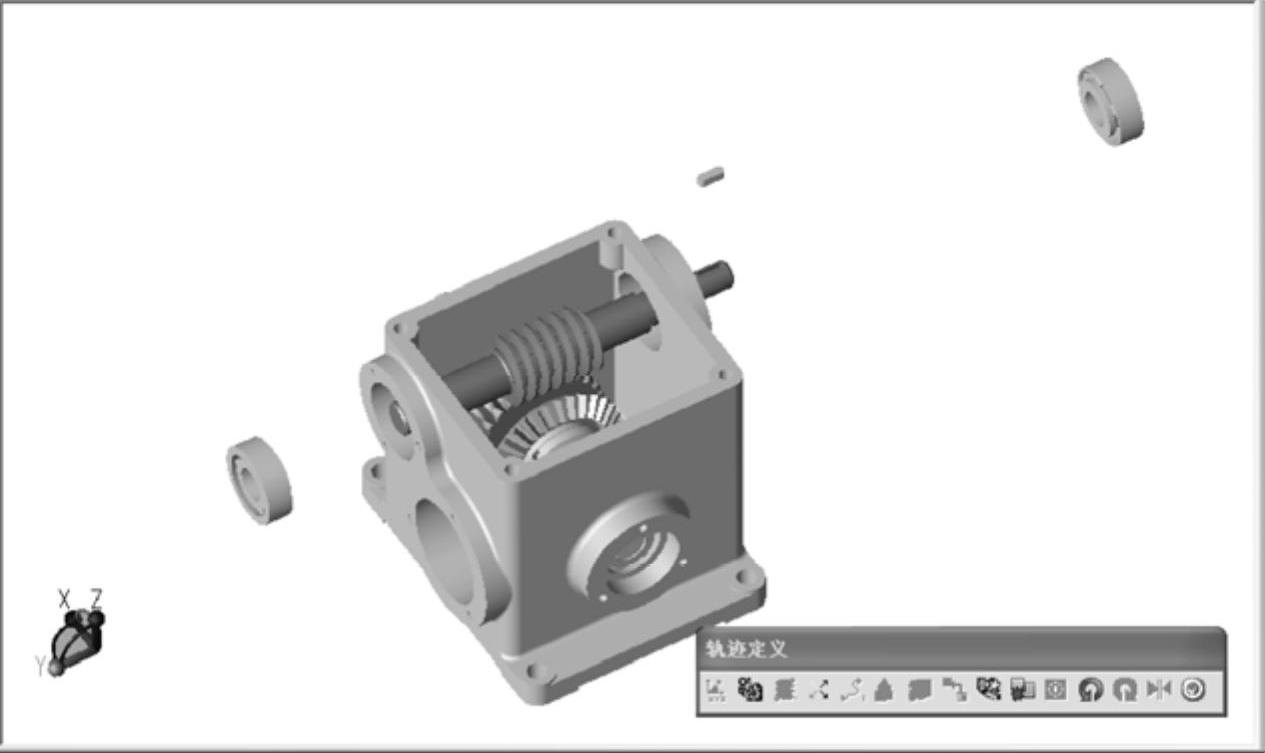
图3-47 定义左端轴承的运动
(4)定义蜗杆、蜗轮的啮合运动(蜗杆直线运动+蜗轮旋转运动)
蜗杆在安装过程中,会与蜗轮作啮合运动,所以需要定义蜗杆的直线运动和蜗轮的旋转运动。定义时分别定义这两个运动,然后通过调整活动顺序将这两个运动调整到同时开始和结束,就能很好地展示蜗轮、蜗杆的啮合运动。
①定义“蜗杆”的直线运动。选择“蜗杆”,沿轴向向箱体外移动到合适位置,如图3-48所示。
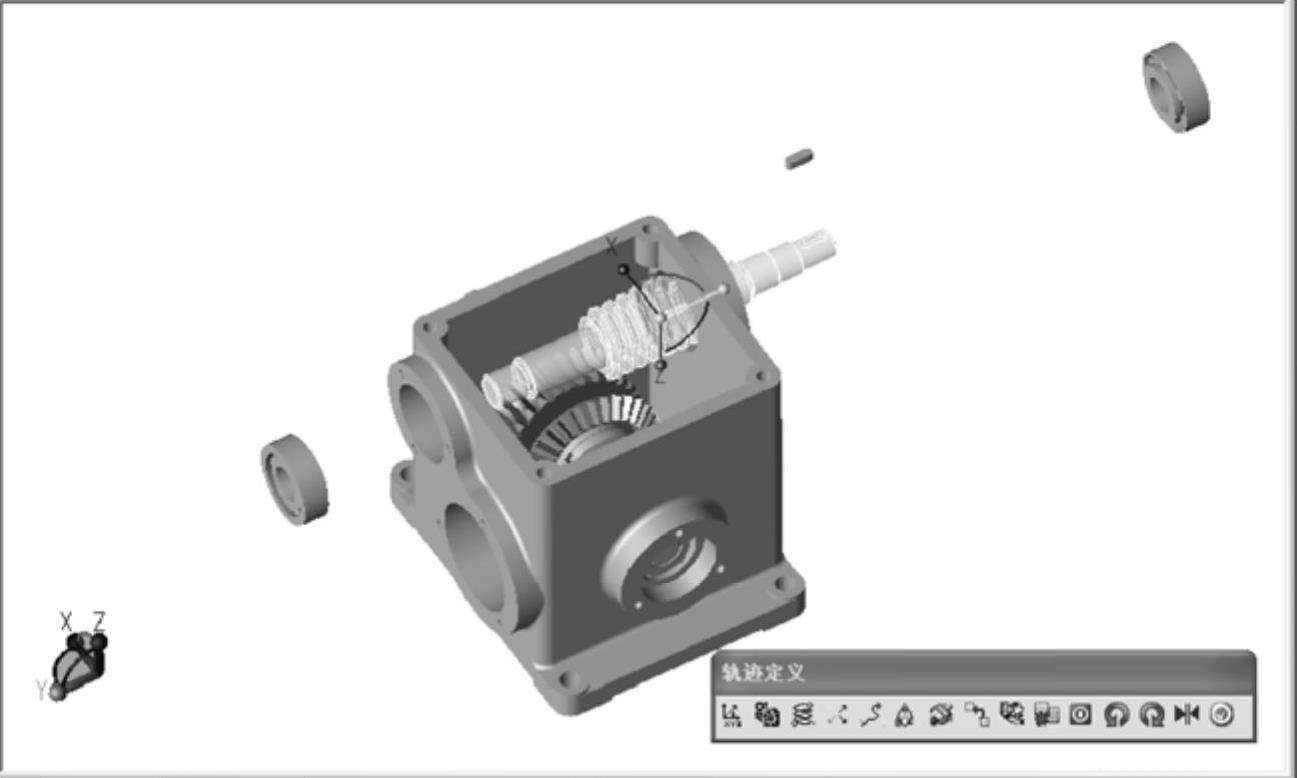
图3-48 定义蜗杆的直线运动
②在“安装蜗杆”工序的装配对象中需要增加“蜗轮”。选择工序“安装蜗杆”,选择右键菜单中的【添加/删除装配对象】命令,在【添加/删除装配对象】对话框中右上角【仅显示未装配对象】复选框默认为选中状态,如果要添加合件中的零部件,需要将此勾选取消,【可选对象】中会显示合件及所有零部件,选择“蜗轮”添加到【装配对象】中即可,如图3-49所示。(https://www.xing528.com)
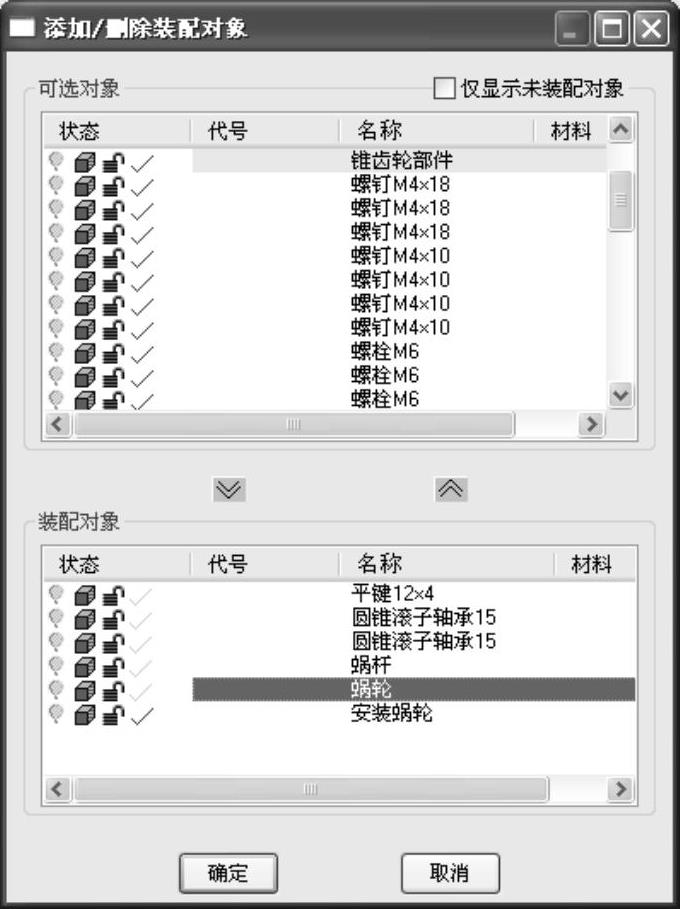
图3-49 添加“蜗轮”到工序“安装蜗杆”中
③定义“蜗轮”的旋转运动。选择“蜗轮”,移动光标到定位夹一坐标面的弧线上,这里是Y、Z轴间的弧线,弧线加亮显示,按下鼠标左键不放,沿着弧线向顺时针方向转动,“蜗轮”随定位夹一起做旋转运动,旋转到合适的位置后释放鼠标左键,如图3-50所示。
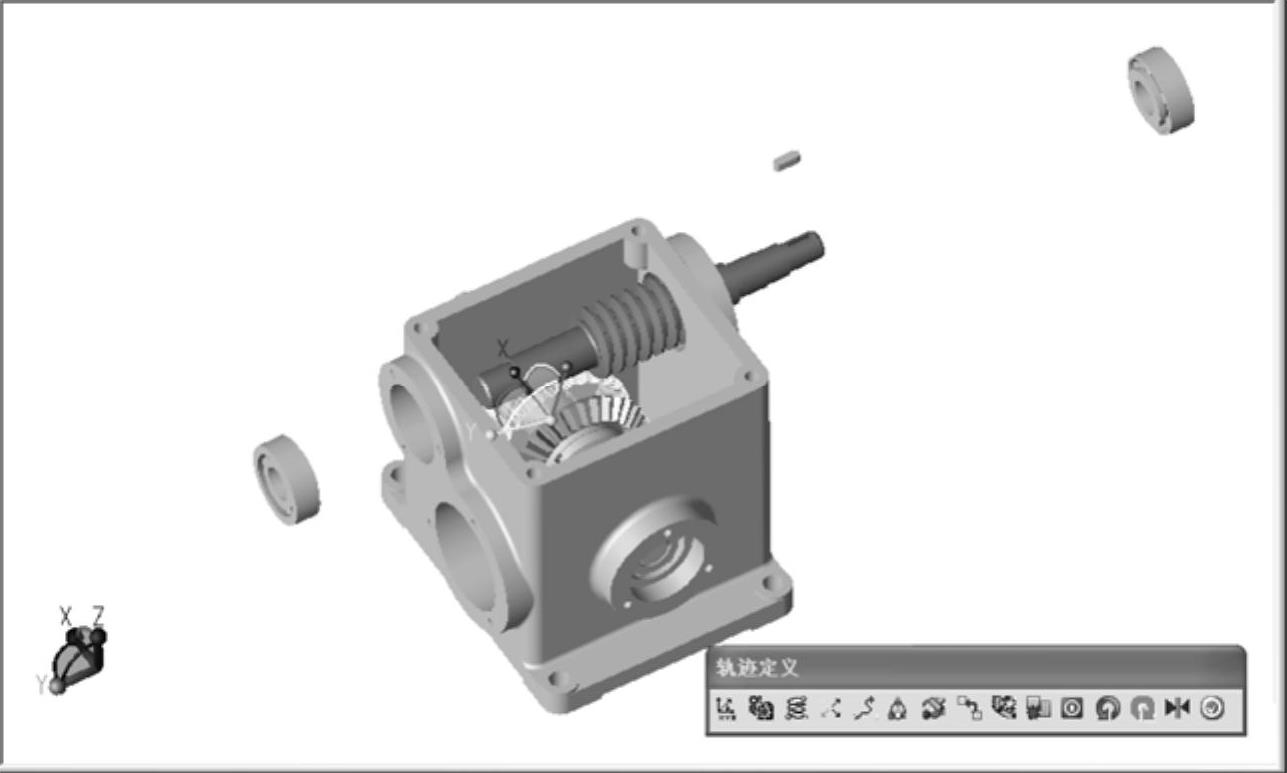
图3-50 定义蜗轮的旋转运动
④定义“蜗杆”的直线运动,如图3-51所示。
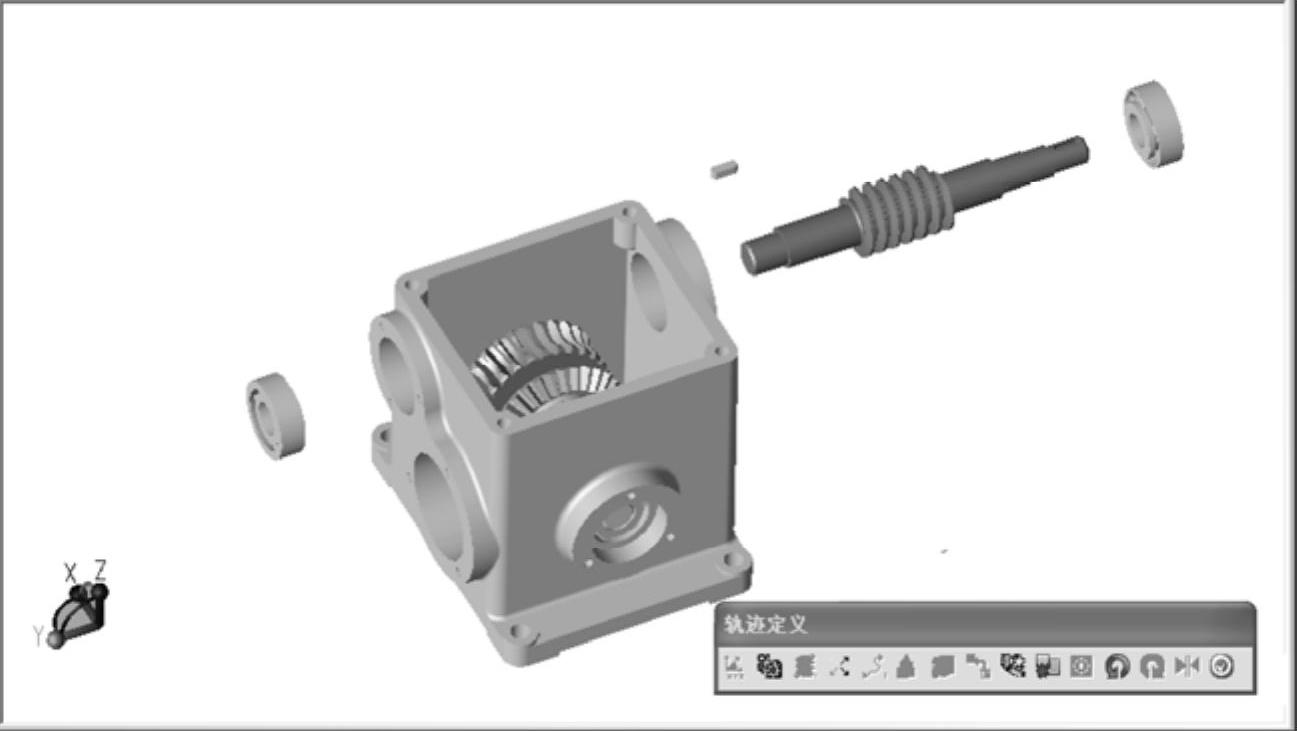
图3-51 定义蜗杆的直线运动
⑤定义蜗轮旋转一小段弧度,定义完后,单击【轨迹定义】工具条上的按钮 结束定义。对于定义的活动,可以在属性区修改活动的运动时间,如图3-52所示,修改最后一个活动的运动时间改为0.001。
结束定义。对于定义的活动,可以在属性区修改活动的运动时间,如图3-52所示,修改最后一个活动的运动时间改为0.001。
⑥下一步需要进行装配时序调整,将蜗轮、蜗杆啮合运动中蜗杆的直线运动和蜗轮的旋转运动调整到同时开始和结束。
选择工序“安装蜗杆”,选择右键菜单中的【调整活动顺序…】命令,弹出图3-53所示的对话框。左边列表区以数据表示活动节点的播放时间和顺序,“长度”“开始”“结束”三栏分别代表播放活动的总时间、开始时间和结束时间。修改时遵循“长度=结束-开始”的原则,且保持一栏为固定栏。右边甘特图区用矩形框及其之间的连接关系形象直观地显示活动节点的播放时间和顺序。按钮 和
和 用来放大或缩小甘特图。
用来放大或缩小甘特图。
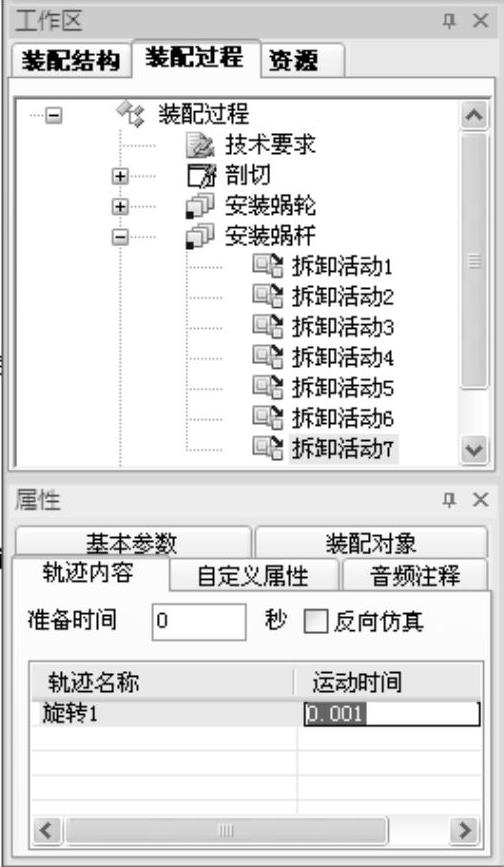
图3-52 修改活动的运动时间
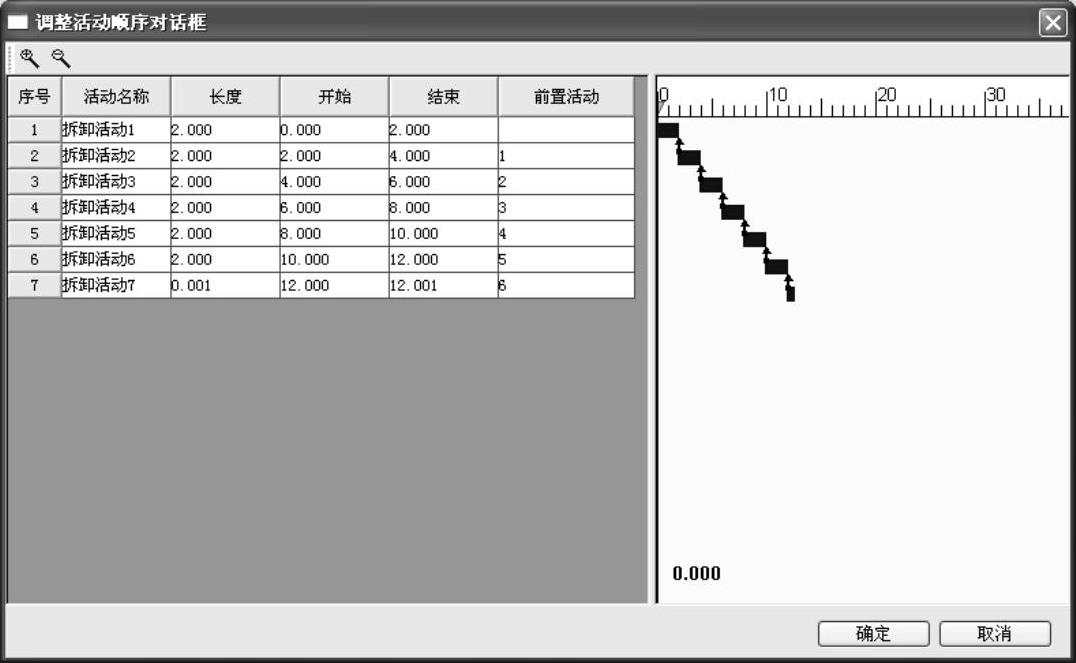
图3-53 调整活动顺序对话框
蜗轮、蜗杆啮合运动中蜗杆的螺旋运动、蜗轮的旋转活动分别为拆卸活动4、拆卸活动5,双击拆卸活动5的前置活动栏,使之呈编辑状态,输入3,表示与拆卸活动4同时开始;如果拆卸活动4、拆卸活动5的长度栏一致则不需要修改,如果不一致,则双击拆卸活动5的长度栏,修改为与拆卸活动4相同的长度,调整活动顺序后的结果如图3-54所示。
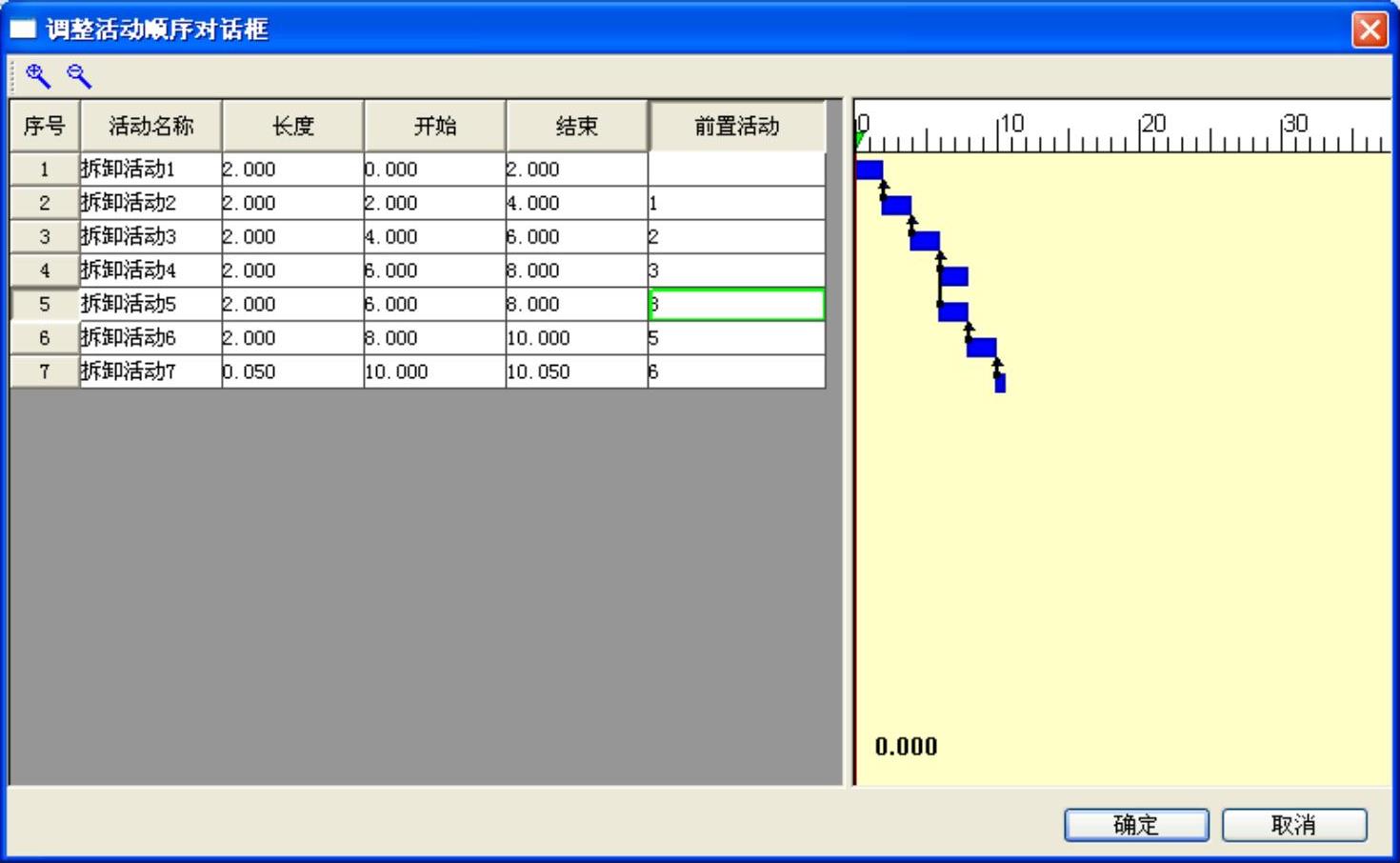
图3-54 调整活动顺序后
⑦对工序“安装蜗杆”进行仿真播放,可以看到蜗杆、蜗轮的啮合运动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。