



目前比较广泛使用的起重机为中小型吨位、液压传动型式、如QY8、QY16、QLY8、QLY16等。
1.起升机构
起升机构用来实现货物的升降,因此它是任何起重机不可缺少的部分,是起重机最重要与最基本的机构。起升机构工作的好坏,直接影响整台起重机的性能。图5-19示出起重机的起升机构。起升机构主要由驱动装置、传动装置、卷扬系统、取物装置与制动装置等组成。另外,根据需要还可装设辅助装置,如起升高度限位器、超重力矩限制器、重量指示器等。

图5-19 起重机的起升机构
a)电动传动 b)机械传动 c)、d)液压传动
1—电动机或液压马达 2—制动器 3—减速器 4—起升卷筒 5—钢丝绳滑轮组 6—吊钩 7—离合器 8—变幅机构 9—回转机构 10—传至下车的动力轴
轮胎起重机的驱动方式大多为集中驱动,如机械、液压传动的起重机,由一台(或两台)内燃机作为动力源,带动各工作机构工作。电力轮胎起重机则采用分别驱动方式,即各机构用单独的电动机驱动。分别驱动方式的优点是布置方便,安装、检修容易;而集中驱动方式的传动装置与操纵系统复杂。
液压马达或电动机用以提供动力,起升速度由减速器和滑轮倍率控制。离合器用作分离或结合动力装置与卷筒之间传递动力,实现重物或吊钩的自由升降。制动器控制吊重物的下落速度和实现空中停止、定位安装。
2.变幅机构
用来改变幅度的机构称起重机的变幅机构。变幅机构根据工作性质,分为工作性的与非工作性的两种类型。工作性的变幅机构是物品在运转中,可以调整幅度,从而扩大服务范围,提高工作机动性;非工作性的变幅机构是在装卸载荷前的空载条件下变幅,使起重机调整到适合于起吊物品的幅度,然后起吊、回转、装卸。对于汽车、轮胎起重机,两者兼而有之,但带载调整幅度时,对载荷作了限制。例如QY12B型起重机,规定带载调幅(吊臂伸缩)载荷为吊臂伸出后,相应额定载荷的1/3;对于起吊额定载荷,只允许从大幅度向小幅度调整。
幅度的改变是靠吊臂在垂直平面内绕其转轴俯仰来达到。对装有伸缩或吊臂的起重机,如QY12B、QY16等,除了改变吊臂的仰角外,还可以改变吊臂长度。两者之间的关系,可查阅起重机说明书。伸缩式吊臂,一般由一组矩形或梯形的对称截面相互套装的臂段组成。最大的臂段在吊臂的底部,称为根段;截面最小的臂段在吊臂的顶部,称为飞段。在这两段之间,可以有一段或多段吊臂。例如:QY16起重机吊臂有三节,即中间有一段;LT1080汽车起重机吊臂有四节,即中间有两段(节),它们分别称为第一中间段、第二中间段。在飞段的顶部有一个装在上部的载荷滑轮和导向滑轮的滑轮组,称为吊臂头。
臂段(除根段外)的伸缩,是由一个或若干个液压缸完成的。这些液压缸称为伸缩液压缸,按其所驱动的臂段来命名。变幅运动也由液压缸驱动,该液压缸称为吊臂变幅液压缸。伸缩液压缸安装在臂段内,同吊臂中心线平行。伸缩液压缸完全伸展后,可测得两端臂长。在载荷作用下,臂段经常锁定,以防止臂段回缩。一根臂段在另一根臂段内的伸缩,是靠滑垫或滚柱支承。
增加变幅副臂,可以提高变幅范围,增加起升高度。副臂是一种类似吊臂的轻型结构,安装在吊臂顶部。用固定长度的保持绳或拉索固定副臂位置。支撑杆连接件安装在吊臂上或吊臂根段上。按厂家说明书,副臂安装可以同吊臂中心相平行,也可以同吊臂中心延长线成45°角以内的任意偏角。目前欧洲国家制造的起重机,以变幅副臂为特征。国内生产的如QY16、QY40型等也都带有副臂。
轮胎起重机大多采用桁架式副臂。它们既可安装在吊臂头部,也可安装在接长臂的端部,不用时可以折叠在吊臂侧面或下面,并锁住,便于保管。
3.回转机构
回转机构是指起重机的回转部分,相对于非回转部分实现回转运动的装置。它是汽车、轮胎起重机的主要工作机构之一。它的作用是扩大作业区域面积,特别是与变幅机构、行走机构配合工作,其作业区域相当宽广。回转机构主要由两部分组成:回转支承装置和回转驱动机构。支承装置使起重机的转动部分,支承在非转动部分(机架)上;驱动装置带动起重机的转动部分回转。
(1)回转支承装置 此装置是保证起重机回转部分有确定的回转运动,并能承受起重机各种载荷引起的垂直力、水平力及倾覆力矩的装置。
汽车、轮胎起重机大多采用转盘式回转支承装置。它的特点是:将回转部分装在一个大转盘上,转盘通过滚动体支承于固定部分上。目前广泛应用的是滚动轴承式回转支承装置。其优点是结构紧凑;装配与维护简单、密封与润滑条件良好;轴向间隙小,工作平稳,消除了大的冲击;回转阻力小、磨损小、寿命长,多轴承中央可以作通道,对起重机的总体布置带来某些方便。其缺点是对材料与加工工艺要求高,成本较高,损坏后不便修理;对于与之连接的其他金属结构刚度要求高,以免使轴承早期损坏。
回转支承装置根据滚动体的不同形式,分为滚珠式、滚子式;根据滚动体的列数,分为单列、双列、三列式。回转支承装置的形式见图5-20和图5-21。
我国目前常用的滚动轴承回转装置是单列滚珠式(见图5-20a)、交叉滚子式(见图5-21a)。QY12B起重机的回转支承装置,是采用双列滚珠式(见图5-21b);QY16起重机的回转支承装置是单列交叉滚子式(见图5-21a)。交叉滚子式滚动轴承的一列滚子中,轴线交叉布置,分别承受向上与向下的轴向力,一般各为一半。

图5-20 滚珠式回转支承装置
a)单列滚珠式 b)双列滚珠式(https://www.xing528.com)
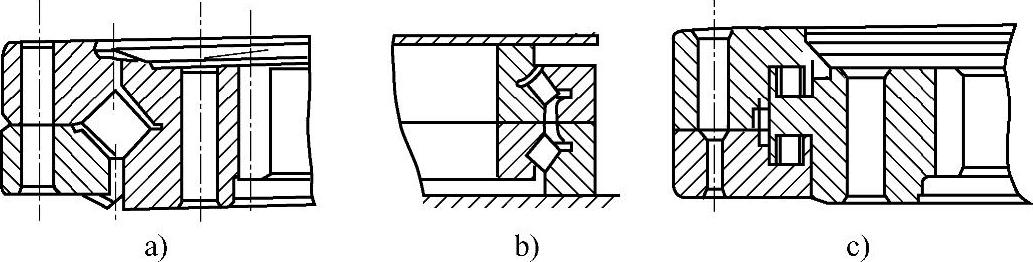
图5-21 滚子式回转支承装置
a)交叉滚子式 b)双列滚子式 c)三列滚子式
回转支承装置采用滚珠时,滚珠之间通常用空心短圆柱形的隔离体,或直径略小一些的隔离球将它们分开,以免滚珠互相摩擦而加速磨损。交叉滚子式也可以不用隔离物。隔离物的材料为铜、尼龙、酚醛夹布塑料、粉末冶金或软钢。
1)QY16起重机的回转支承装置的结构。其回转支承见图5-22。由图可见,回转支承既是起重机整体旋转部分的支承装置,又是上车和底盘的连接部件。回转支承的上、下外圈与转台连接,内齿圈与底盘车架连接。在上、下外圈与内齿圈组成的正方形截面圆周轨道上,相互交叉排列着98个滚子。滚子与滚子之间装有隔离块,上、下外圈之间垫有调整垫,以调整上、下外圈与内齿圈之间的轴向间隙,保证转动平稳、灵活。

图5-22 QY16起重机的回转支承
1—上外圈 2—下外圈 3—滚子 4—内齿圈 5、6—密封 7—调整垫
2)QY12B起重机的回转支承装置的结构。其回转支承见图5-23。回转支承的上、下外圈与回转部分连接,内齿圈与车架连接,以便实现转台回转。
(2)回转驱动装置 机械驱动是应用最广的一种。它由原动机、联轴器、制动器、减速器,以及最后一级大齿轮(圈)组成。驱动部分大多装在起重机的回转部分上,而最后一级大齿轮则固定在底架上。机械驱动的回转机构,根据驱动元件不同,出现了多种驱动形式。这里以产量较多的QLD16起重机为例,简述其构造。

图5-23 QY12B起重机的回转支承
1—上外圈 2—钢球 3—内齿圈 4—密封 5—下外圈
QLD16起重机为全回转自行式桁架动臂起重机,采用自制专用底盘,各金属结构由型钢或钢板焊接而成。起重臂由四节组成,每节长5m,可根据需要组装成不同长度,最大起升高度可达20m,且可吊重行驶。行走装置采用双轴八个充气轮胎,前轮转向,后轮驱动,具有良好的行驶性能,行驶速度可达18km/h。图5-24示出QLD16起重机传动系统。
1)动力装置。该装置由柴油机通过弹性柱销联轴器带动直流发电机发电,分别供给各工作机构直流电动机,实现起升、回转、变幅、行驶等动作。同时,柴油机还驱动空气压缩机和液压泵,提供所需压缩空气和液压油。改变柴油机转速,即可改变发电机输出电压,从而控制各机构电动机转速,以实现无级调速。

图5-24 QLD16起重机传动系统
Ⅰ—起升机构 Ⅱ—变幅机构 Ⅲ—回转机构 Ⅳ—行走机构
2)起升机构。图5-24中的Ⅰ,示出QLD16起重机的起升机构。电动机DQS动力通过传动轴,经一对圆锥齿轮和圆柱齿轮使卷筒旋转,卷筒上的钢丝绳便可随之收或放,通过吊钩滑轮组使重物升降。电动机输出轴上装有块式常闭制动器,控制重物的升降。
3)变幅机构。图5-24中的Ⅱ,示出QLD16起重机的变幅机构。电动机通过联轴器、蜗杆减速器,驱动用花键连在一起的变幅卷筒旋转,卷筒上的钢丝绳便可随之收或放,通过滑轮组、拉臂钢丝绳带动起重臂起落。
4)回转机构。图5-24中的Ⅲ,示出QLD16起重机的回转机构。电动机DHZ通过联轴器、蜗杆减速器,带动和蜗轮装在同一立轴的小齿轮,沿着相啮合的大齿圈节圆旋转,其反作用转矩导致回转减速器和转台一起绕大齿圈中心旋转。
5)行走机构。图5-24中的Ⅳ,示出QLD16起重机的行走机构。两个行走电动机DXY、DXZ分别通过联轴器、圆柱斜齿轮减速器、开式链传动,使左、右两对后轮转动而使起重机行走。利用两台电动机串、并联的方法,可获得两档无级调速和较大的爬坡能力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。