



现燃料设备运行控制系统中,继电器控制回路通常用于起动控制回路(自保回路)、电动机正反转控制回路、含限开关(机械式行程开关或电子接近开关)的控制回路和保护回路。
(一)起动控制回路(自保回路)
1.工作原理
电动机起动控制回路原理如图11-1所示,其工作过程为

按下SB1按钮→KM线圈断电→触头KM断开→电动机停转→SB1按钮回弹闭合
这种闭锁回路在输煤设备上得到了非常广泛的应用,如在调试、试运、故障处理及就地操作时,往往手动起停,几乎输煤线上的所有设备都设有这样的就地操作装置。为了免除电动机、控制电器等电气设备及操作者受到不正常工作状态的有害影响,使工作更为可靠,在自动控制线路中,必须具有完成各种保护作用的保护装置,如热继电器、断路器。
(二)电动机正反转控制回路
1.工作原理
电动机正反转控制回路原理如图11-2所示。按下SB2按钮,正转接触器线圈得电并自锁,电动机正转。KM1的一个动断触点串联在接触器KM2线圈的控制回路内,它此时先断开,切断了接触器KM2线圈的回路;此时若再按下SB3按钮,接触器KM2受KM1的动断触点互锁不能动作,这样就防止了电源相间短路的发生。
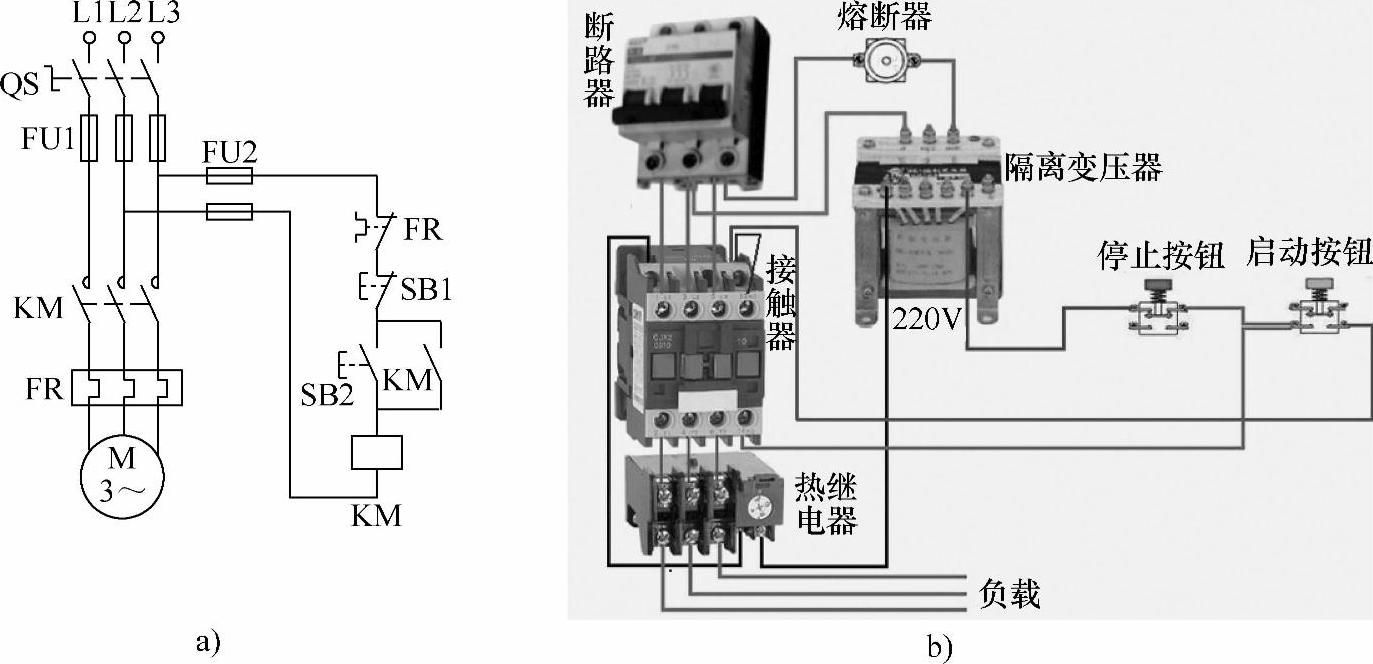
图11-1 电动机起动控制回路原理
a)电气元件图 b)实物接线图
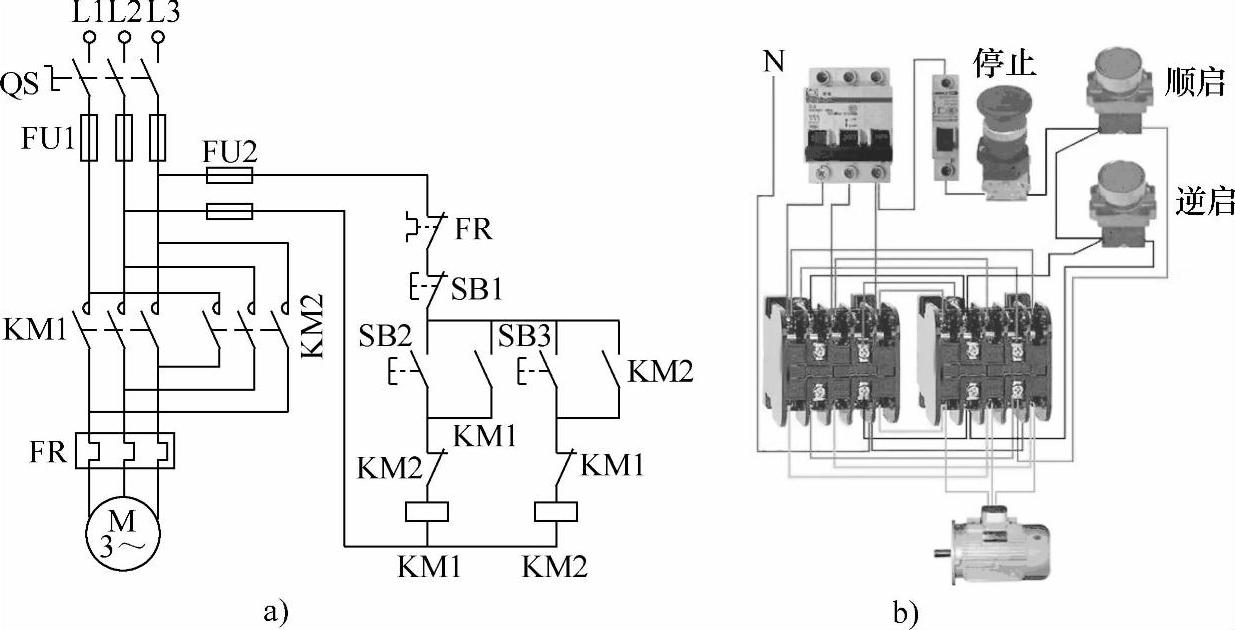
图11-2 电动机正反转控制回路原理
a)电气元件图 b)实物接线图
反转时,先按下停止按钮SB1,令KM1断电释放,KM1常开触点复位断开,电动机停转,KM1的动断触点恢复,为反转作准备。再按下SB3按钮,KM2线圈才能得电,电动机反转。
2.应用举例
图11-3所示为翻车机本体运行(翻卸过程)电气控制原理,从图中可见,翻车机低速翻转(对应正翻起始位置与回翻终了位置)或高速翻转都含有电动机正反转控制回路,其作用就是通过互锁触点(接触器的常闭触点:2KMF1、2KMR1、2KMF2、2KMR2)互相制约,来达到正反转相对独立运行。
(三)含限位开关(机械式行程开关或电子接近开关)的控制回路
1.行程控制回路
行程控制回路就是当运动部件到达一定行程位置时,采用行程开关(或电子接近开关)来进行控制的回路。如图11-4所示,1XWK和2XWK为限位开关,装在预定的位置上。当按下ZQA,接触器ZC线圈得电动作,电动机正转起动,运动部件向前运行,当运行到终端位置时,装在运动物体上的挡铁碰撞行程开关1XWK,使1XWK的常闭触点断开,接触器ZC线圈断电释放,电动机断电,运动部件停止运行。此时,即使再按ZQA,接触器ZC线圈也不会得电,故保证了运动部件不会越过1XWK所限定的位置。当按下FQA时,电动机反转,运动部件向后运动至挡铁碰撞行程开关2XWK时,运动部件停止运动。若中间需停车,可按下停止按钮TA。
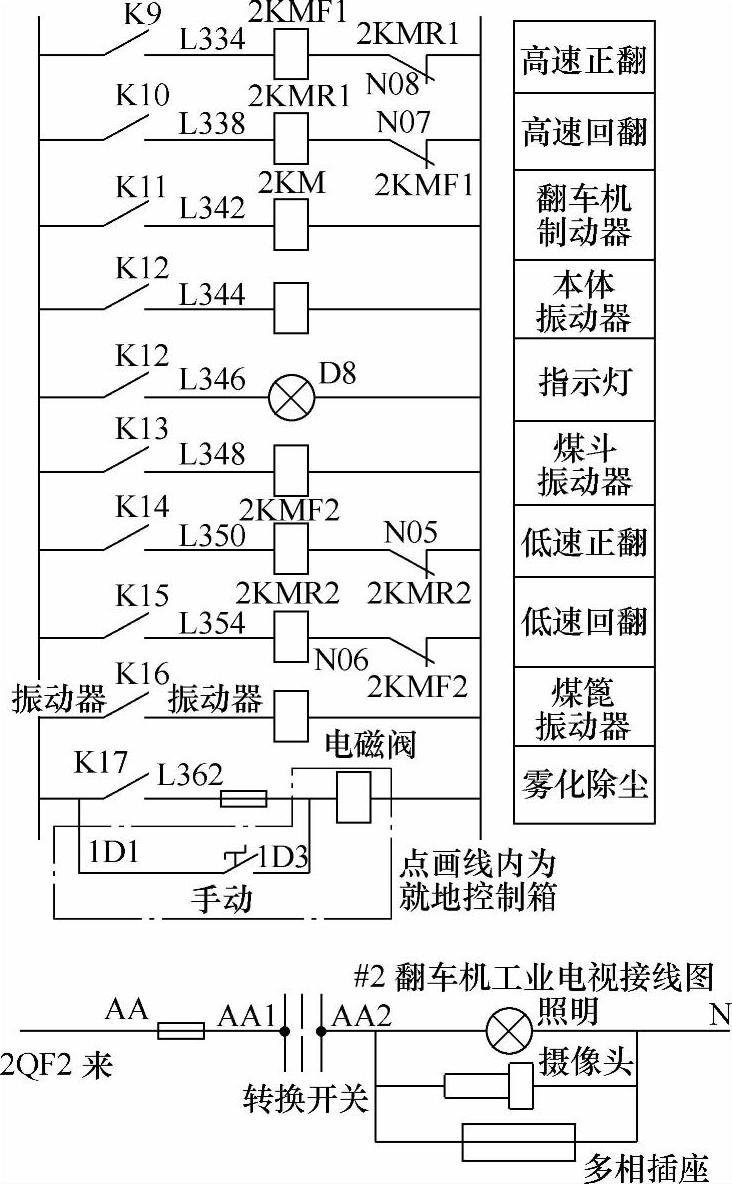
图11-3 翻车机本体运行(翻卸过程)电气控制原理
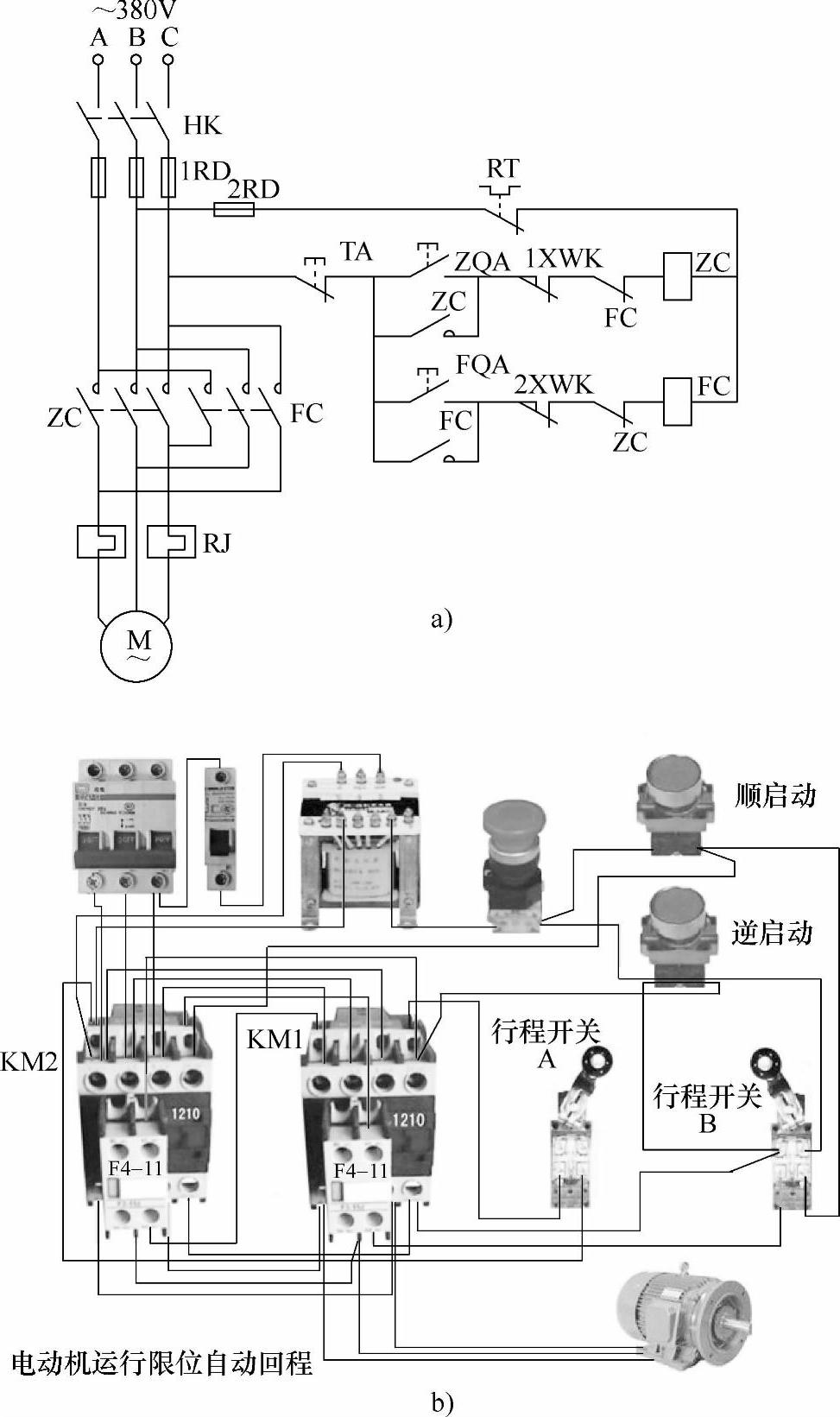
图11-4 电动机行程控制回路原理
a)电气元件图 b)实物接线图
行程控制回路在燃料设备的电气控制中应用较多,如输煤线上的三通挡板控制,叶轮给煤机、斗轮机、装卸桥、调车机的行走机构及各设备上的升降机构,其行程位置都是用行程限位开关(机械式行程开关或电子接近开关)来控制的。
例如,图11-5所示为叶轮给煤机运行电气控制原理,图中行走机构采用限位开关控制的行程机构。其工作原理如下:
1)叶轮给煤机运行状态下,常开触头K2处于闭合位置,按下起动按钮3QA,接触器KM3得电后,回路自锁(3AQ断开),常闭触点K3断开,常开触点K3闭合(叶轮给煤机左行与右行互锁)。叶轮给煤机左行。当行至规定位置后,限位开关1XK动作,KM3断电,常开触点K3断开,左行停止。常闭触点K3闭合,为右行做准备。
2)同理,按下动断按钮4QA,KM4得电后,常闭触点K4断开,常开触点K4闭合,控制回路自锁(4QA断开);大车右行,当行至规定位置时,2XK动作,KM4断电,常开触点K4断电,右行回路断开,右行停止,常闭触点K4闭合,准备下一个工作循环。
3)3TA为急停按钮,如当叶轮行走中突遇异常情况可随时停机。
2.顺序动作控制回路
顺序动作回路是在行程控制的基础上,通过接触器或中间继电器的转换,控制某一动作的优先权及动作的先后顺序的。其控制原理与行程控制原理基本相同。
(1)工作原理 如图11-6所示,按下起动按钮2SB后,继电器1K得电并自锁,进行第一个程序,且1K的另一动合触点闭合,为2K得电作好准备。当第一个程序工作结束后,行程开关1ST被压合,2K得电并自锁,进行第二个程序。同时由于2K的一个动断触点打开,使1K断电。其他程序的转换则以此类推。
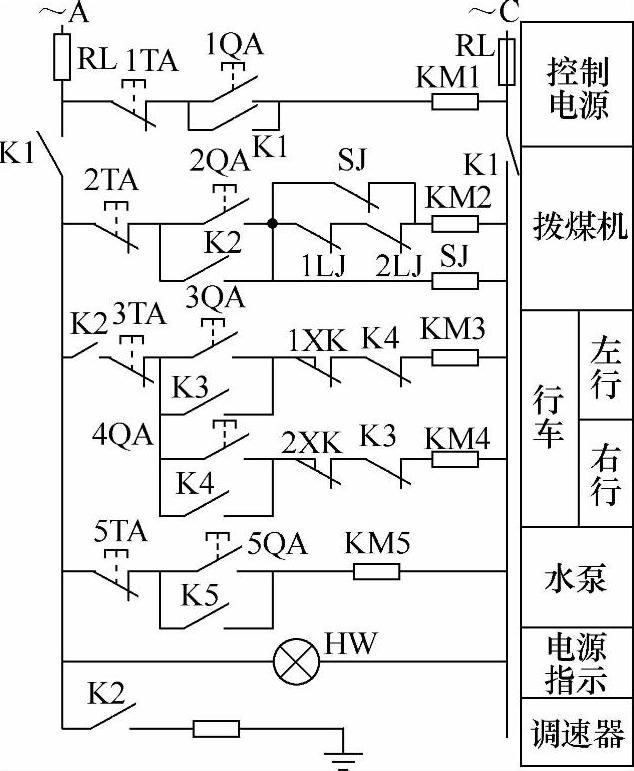
图11-5 叶轮给煤机运行电气控制原理(https://www.xing528.com)
(2)重车调车机四记轴电气控制回路 如前所述,空车驶出翻车机平台是翻车机翻转的联锁条件之一。重车调车机牵车臂前钩牵引空车驶出翻车机平台时,通常都设有空车移动位置检测装置,其控制回路通常为四记轴电气控制系统,如图11-7所示。
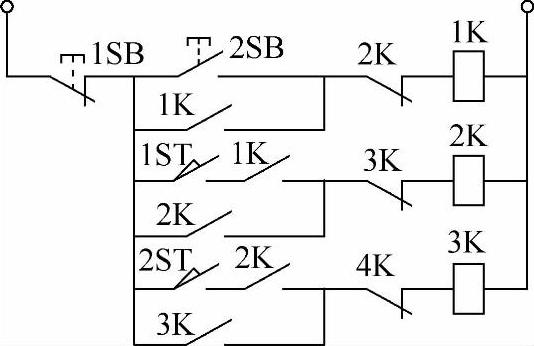
图11-6 顺序动作控制回路原理图
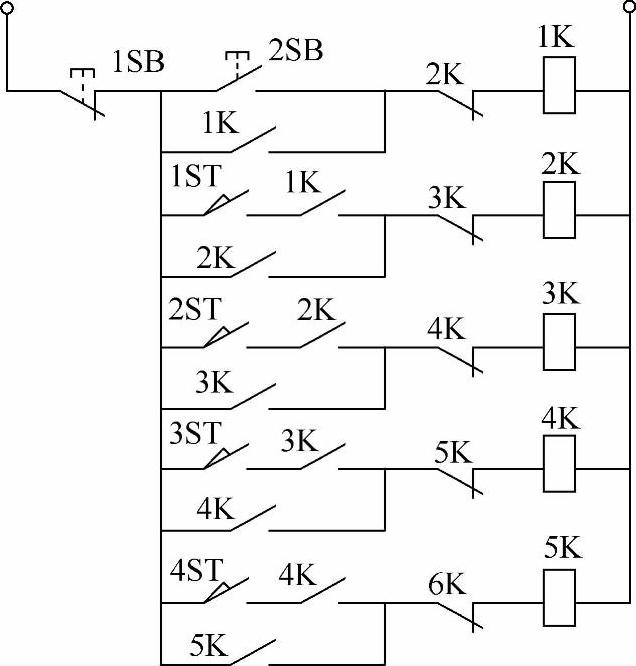
图11-7 重车调车机行程位置控制原理
其工作原理为:牵引空车移动至Ⅰ位时,1ST限位动作(触点结合),线圈2K得电,常闭触点2K断开,常开触点2K闭合,记轴位置一次。当空车行至Ⅱ位时,限位开关2ST动作,线圈3K得电,常闭触点3K断开,切断上一回路,常开触点3K闭合,记轴位置两次。以此类推,共记轴四次。空车驶出翻车机平台的电信号通过传感器传至上位机,以提供翻车机翻转的必要条件。
(四)保护回路
输煤电动机一般采用短路保护、失压保护、过载保护、限位保护、联锁保护、过电流保护、行程保护、压力保护、零位保护等。
1.短路保护
一般采用熔断器作为短路保护装置,有的采用自动断路器。其作用是在电动机发生短路故障时,熔断器的熔丝熔断,从而切断电源,以避免短路电流烧毁电动机。
2.失压保护
一般采用磁力起动器和自动断路器。磁力起动器的电磁线圈在起动电动机的控制回路中起失压保护作用。自动断路器上装有失压脱扣装置。
失压保护的作用是为在电源电压过低及断电情况下切断电动机电源,以防止由于电源电压过低,而引起电动机转速下降,电流增加而烧毁电动机,或断电后又恢复送电,电动机又自行起动而发生意外。
3.过载保护
一般采用热继电器作为电动机的过载保护装置。有的采用自动断路器的热脱扣器。
过载保护的作用是为避免电动机长期过载运行而烧毁电动机。一般热继电器的电流整定值应为电动机额定电流的1.2倍,当电动机过载20%,时间在20min左右内热继电器才动作。在电动机短时间过载时,热继电器不动作。
4.零压或欠电压保护(零位保护)
零位保护的作用在于以上因电源电压消失或降低而可能发生的不允许故障。如运行的设备可能因某种原因使外部一次电源跳闸,暂时停止供电,对于手控电器,如工作转换手柄、开关等,若操作不慎,忘记将其置于零位,则当电源重新供电时,电动机就会自行起动,而造成事故。如果在回路中增设如图11-8所示的自动控制回路,在电源暂停供电或电压降低时,接触器线圈应会失电,触点断开,电动机脱离电源而得到保护。之后当电源电压恢复时,不重按起动按钮,电动机应不会自行起动。
零位保护电气原理:当主令控制器置于零位时,LWJ得电,其常开触点闭合并自锁,当手柄置于正转或反转时,即LK2或LK1闭合,正转接触器ZC得电或反转接触器FC得电动作。若运行时,突然断电,电动机停转,同时LWJ常开触点断开。若突然送电,由于手柄不在零位,LWJ不得电,其常开触点仍在断开位置,控制回路不通,因此ZC或FC仍不得电动作,即只有将手柄置于零位,才能实现正转或反转控制操作。
零位保护的具体应用实例是斗轮机或装卸桥运行操作的零位保护装置,如图11-9所示,其工作原理如下:
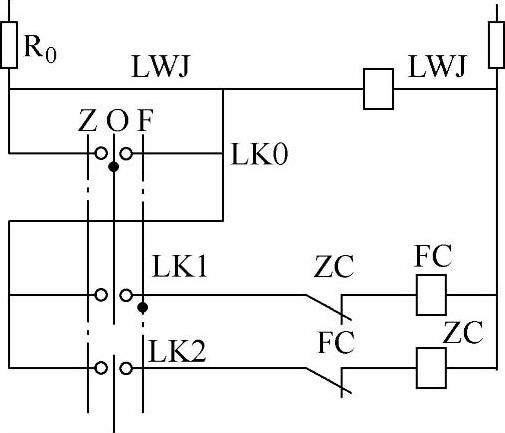
图11-8 零位保护电气原理

图11-9 斗轮机零位保护电气原理
SL是主令控制器,只有当SL的手柄在零位时,SL1接通,这时零电压继电器KUV接通,而后转动手柄(向右或向左),即可将1KM或2KM接通(1KM和2KM是控制电动机正、反转的接触器线圈),起动电动机。如果电源电压消失,则KUV断电而断开其触点,因1KM或2KM断电,电动机停转,当电源电压恢复时,只有把SL转回到零位时,电动机才能再起动。
5.联锁保护
联锁是保证系统安全运行而在输煤系统各设备之间设立的最基本相互关系,从而保障输煤系统各台设备能按照一定的运行关系起停,达到互相制约的目的。联锁保护装置在燃料运行设备中有广泛的应用,现以输煤胶带机起停联锁为例进行说明。
输煤胶带机正常起停顺序为:按逆煤流的方向起动,按顺煤流方向停机。图11-10所示为输煤胶带机联锁运行电气原理,其控制原理如图11-11所示。
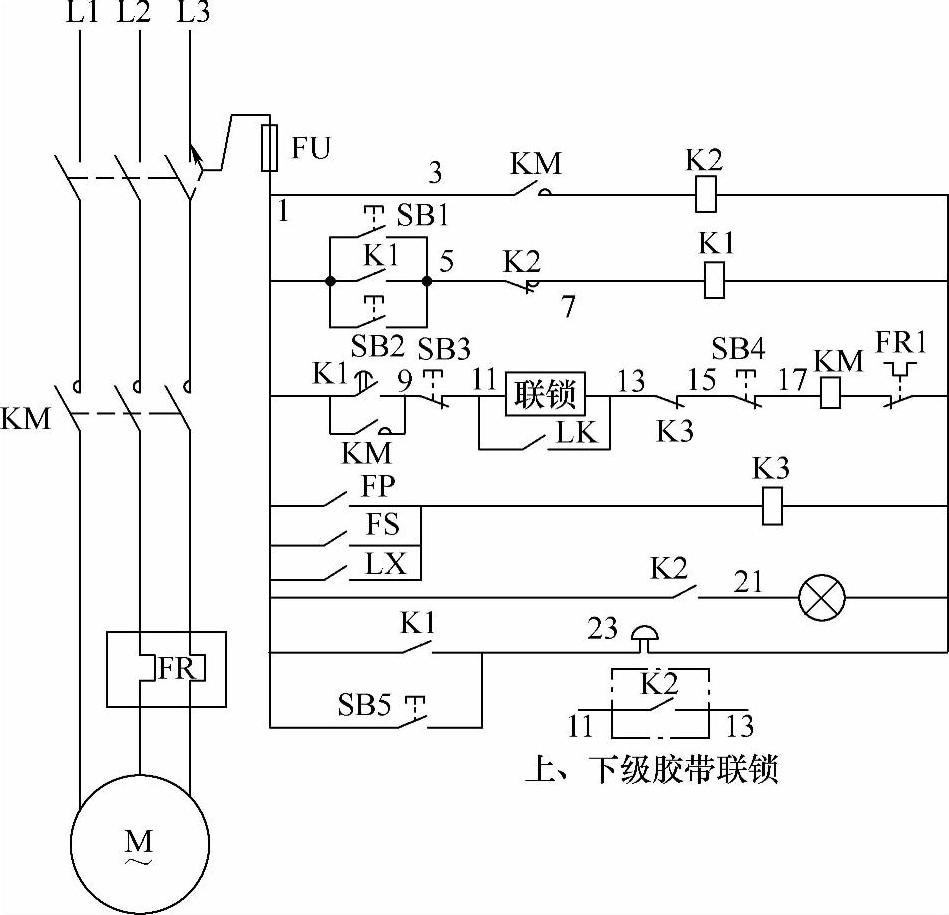
图11-10 输煤胶带机联锁运行电气原理
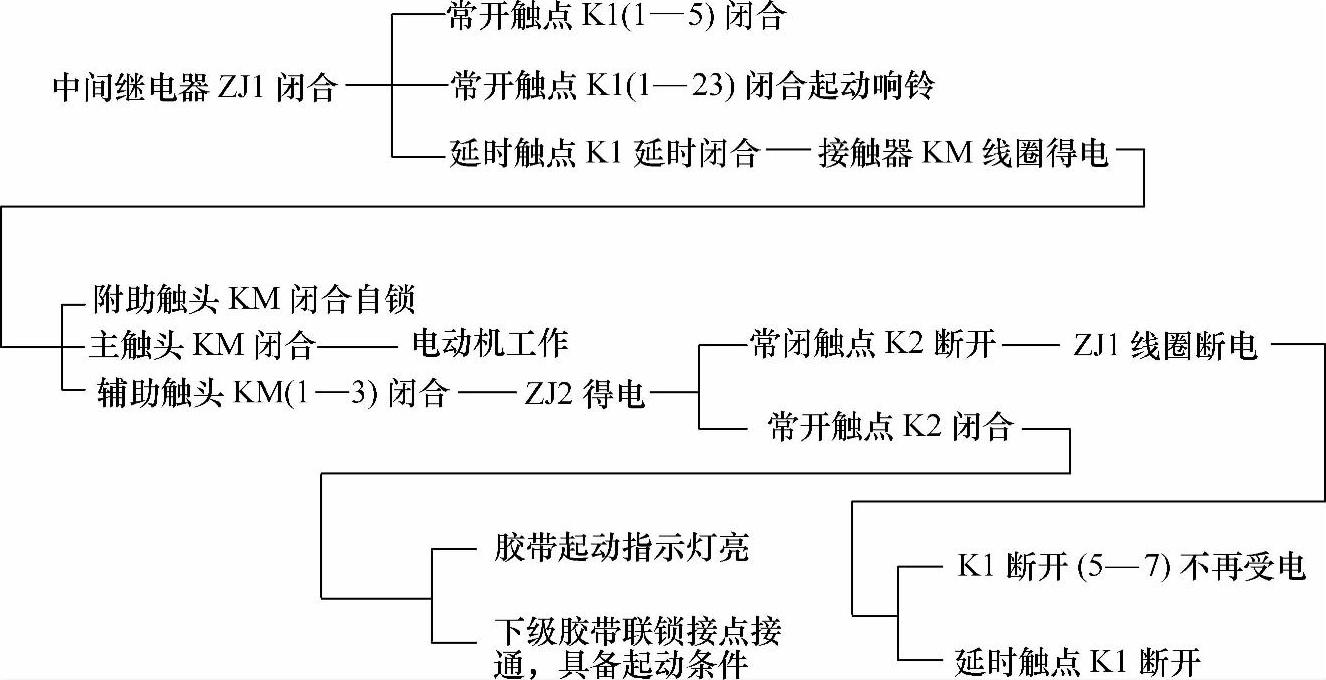
图11-11 输煤胶带机联锁运行控制原理
1)该段胶带联锁接点(11~13)已通,具备起动条件。
2)就地控制按钮SB1或远程操作控制按钮SB2动作。
3)SB3是就地停止按钮,SB4是远程集控停止按钮,如有异常,操作停止按钮,可使主回路(9~17)断电,电动机停转。
FP是防跑偏装置,FS是防撕裂装置,LX是事故拉线开关,即如遇异常(胶带严重跑偏、胶带撕裂或其他故障),其保护装置接点闭合,电磁线圈K3得电,常闭触点K3断开,主回路(9~17)断电,电动机停转。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。