



从前面的分析可知,电动机的运行有电动和制动两种状态,这两种状态的机械特性曲线分布在Te-n坐标平面上的四个象限内,这就是所谓的电动机的四象限运行,如图4-36所示。
在第一、三象限内,Te与n0同方向,为电动状态。其中,在第一象限内,n>0,Tem>0,为正向电动状态;在第三象限内,n<0,Te<0,为反向电动状态。
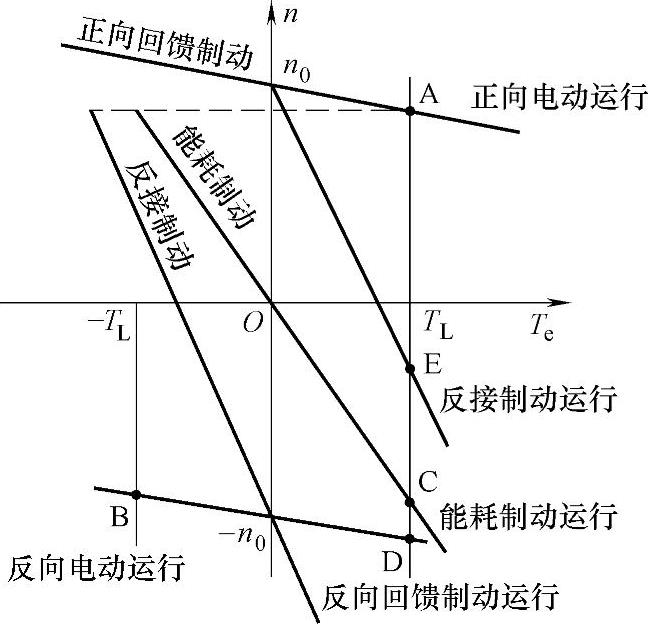
图4-36 电动机的各种运行状态
在第二、四象限内,Te与n0反方向,为制动状态。其中,在第二象限内,n>0,Te<0,对于能耗制动和反接制动来说,是对正向运行的电动机进
行制动的减速过程;对于回馈制动来说,是正向运行的电动机处于减速过程或是处于稳定的
回馈制动运行。在第四象限内,n<0,Te>0,在下放位能负载时会出现这一情况。在第四
象限内的工作点C、D、E等均是稳定制动运行工作点,此时位能性负载是匀速下降的。
例:一台他励直流电动机数据为PN=22kW,UN=220V,IN=115A,nN=l500r/min,
Ra=0.1Ω,电枢电流最大允许值为2IN。若电动机运行于正向电动状态时,TL=0.9TN,忽
略空载转矩,求:
(1)为使反抗性负载在额定状态下进行能耗制动,求电枢回路应串入的制动电阻值,若采用反接制动制动电阻Rb又应是多大?
(2)用此电动机拖动起重机,传动机构的转矩损耗为ΔT=0.1TN,在能耗制动下以-200r/min的转速下放重物,求电枢回路应串入的制动电阻值Rb。
解:基本数据计算:

电动机正向运转时的负载转矩及负载电流为(https://www.xing528.com)
TL=0.9TN
IL=0.9IN=103.5A(Φ=ΦN)原工作点转速

原工作点反电动势
Ea=CeΦNn=0.139×1508.3=209.7V
(1)能耗制动时串入的电阻

反接制动时串入的电阻

(2)位能性负载时,传动机构的转矩损耗为ΔT=0.1TN,采用能耗制动以-200r/min的转速下放重物,下放时的负载转矩及负载电流
TL1=TL-2ΔT=0.9TN-2×0.1TN=0.7TN
IL1=0.1IN=0.7×115A=80.5A(Φ=ΦN)
电枢回路串入的电阻

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。