



为了使生产机械快速停止或反向旋转,可以采用反接制动。有两种反接制动方法,一种是电压反接制动,一种是倒拉反接制动。
1.电压反接制动(电枢反接制动)
电枢反接制动是通过把正在正向运行的电动机的电源电压突然反接来实现的。如图4-33所示。接触器KM1的触点闭合时,电动机电枢电流方向从左向右,处于电动运行状态。当进行反接制动时,接触器KM2的触点闭合,电枢电流方向从右向左,电枢电压反接,电动机处于制动状态。为限制过大的制动电流,串入限流电阻Rz。Rz的大小应使反接制动时电枢电流不超过电动机的最大允许电流Imax=(2~2.5)IN,因此应串入的制动电阻值为
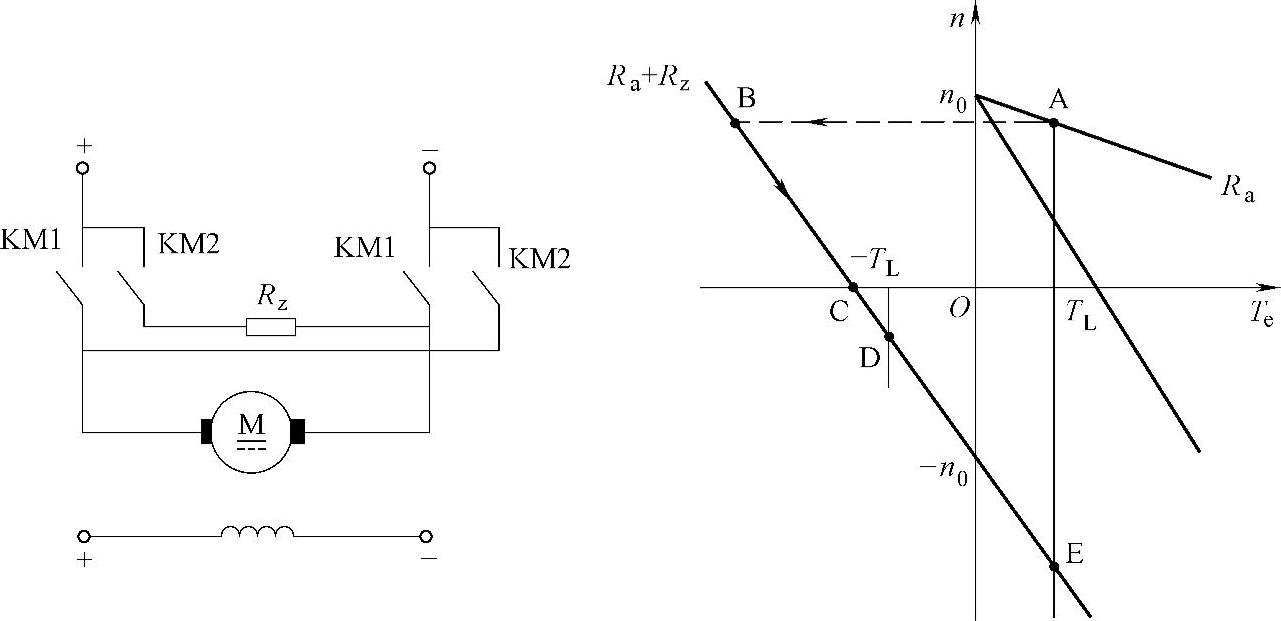
图4-33 电压反接制动
电压反接制动时的机械特性就是在U=-UN,Φ=ΦN,R=Ra+RB条件下的一条人为特性,即
可见,其特性曲线是一条通过-n0点,斜率为 的直线(BC)。
的直线(BC)。
设电动机原来工作在固有特性上的A点,反接制动时,由于转速不能突变,工作点沿水平方向跃变到反接制动机械特性上的B点,之后在制动转矩作用下,转速开始下降,工作点沿BC方向移动,当到达C点时,制动过程结束。在C点,n=0,但制动的电磁转矩TeB≠0,根据负载性质的不同,此后工作点的变化又分为两种情况。
(1)电动机拖动反抗性负载,当C点处的电磁转矩大于负载转矩时,若为了制动停车,在电动机转速接近于零时必须立即断开电源,否则电动机将在反向电磁转矩的作用下反向起动,并一直加速到D点,进入反向电动状态下稳定运行。(https://www.xing528.com)
(2)若电动机拖动位能性负载,则过C点以后电动机将反向加速,一直到达E点,即电动机最终进入回馈制动(后面将要介绍)状态下稳定运行。
反接制动过程中,从电源输入的电功率和从轴上输入的机械功率转变成的电功率全部消耗在电枢回路的电阻(Ra+Rz)上,其能量损耗是很大的。
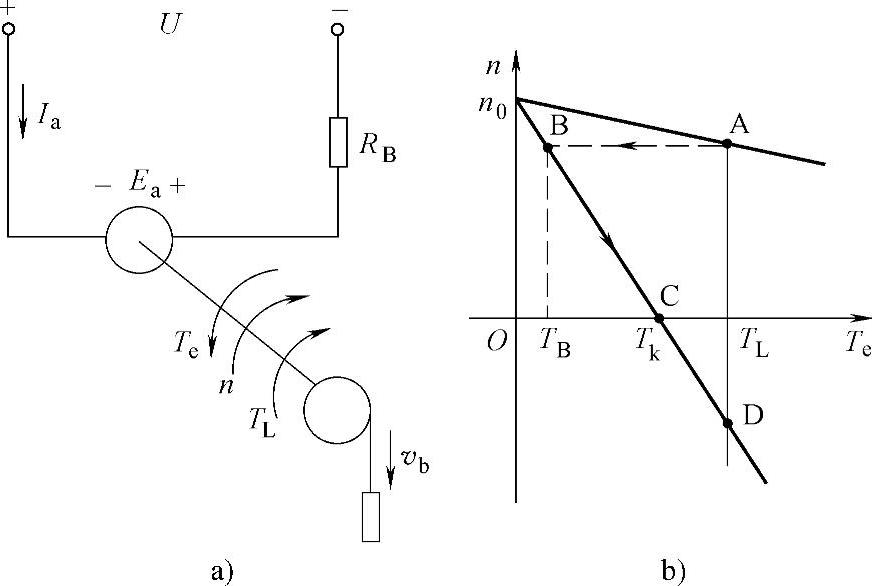
图4-34 倒拉反转反接制动机械特性
2.倒拉反转反接制动
倒拉反转反接制动只适用于位能性恒转矩负载,现以起重机下放重物为例来说明,如图4-34所示。正向电动状态(提升重物)时,电动机工作在固有机械特性上的A点。如果在电枢回路中串入一个较大的电阻RB,便可实现倒拉反转反接制动。串入RB将得到一条斜率较大的人为机械特性曲线,如图中的直线n0D所示。串电阻瞬间,因转速不能突变,所以工作点由固有机械特性上的A点沿水平方向跳跃到人为机械特性曲线上的B点,此时电磁转矩TB小于负载转矩TL,于是电动机开始减速,工作点沿人为机械特性曲线由B点向C点变化。到达C点时,n=0,电磁转矩为堵转转矩Tk,因Tk仍小于负载转矩TL,所以在重物的重力作用下电动机将反向旋转,即下放重物。
因为励磁不变,所以Ea随n的反向而改变方向,由图中可以看出Ia的方向不变,故Te的方向也不变。这样,电动机反转后,电磁转矩为制动转矩,电动机处于制动状态,运行在图中的CD段。随着电动机反向转速的增加,Ea增大,电枢电流Ia和制动的电磁转矩Te也相应增大。当到达D点时,电磁转矩与负载转矩平衡,电动机便以稳定的转速匀速下放重物。电机串入的电阻RB越大,则最后稳定的转速越高,下放重物的速度也越快,对应于给定下放速度nD,所串入的电阻RB的大小为
式中 EaD——电动机下放速度为nD时的反电动势,EaD=CeΦNnD
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。