



能耗制动的方法是将正在运行中的电动机电枢两端从电源断开后,立即在转子两端接入一制动电阻RB,进入制动运行,此时,电动机靠生产机械惯性力的拖动而发电,将生产机械储存的动能转换成电能,并消耗在电阻(Ra+RB)上,直到电动机停止转动为止,所以这种制动方式称为能耗制动,其原理如图4-31所示。
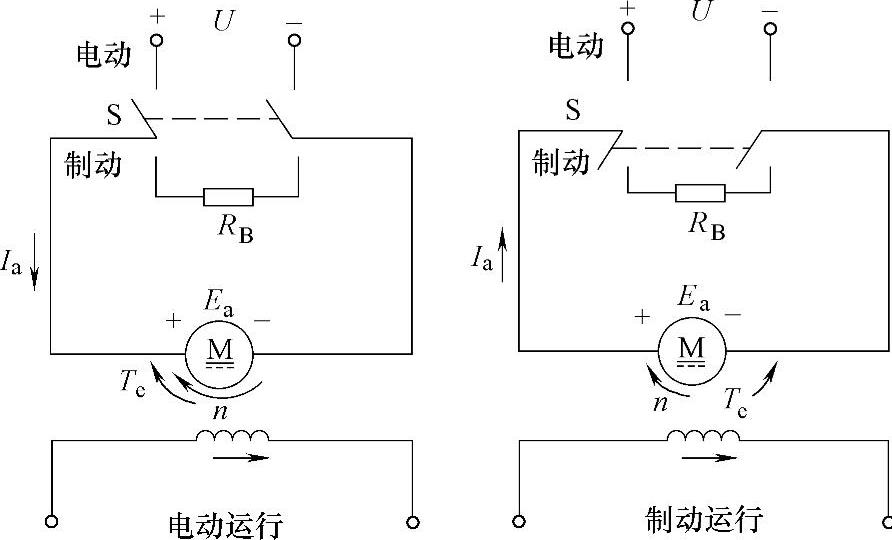
图4-31 能耗制动原理
开关S接电源侧为电动状态运行,此时电枢电流Ia、电枢电动势Ea、转速n及电磁转矩Te的方向如图4-31所示。当需要制动时,将开关S投向制动电阻RB上,电动机便进入能耗制动状态。
因为磁通保持不变,初始制动时,电枢存在惯性,其转速n不能马上降为零,而是保持原来的方向旋转,于是n和Ea的方向均不改变。但是,由Ea在闭合的回路内产生的电枢电流IaB却与电动状态时电枢电流Ia的方向相反,由此而产生的电磁转矩TeB也与电动状态时Te的方向相反,变为制动转矩,于是电动机处于制动运行。
能耗制动是在U=0、Φ=ΦN、R=Ra+RB的前提条件下,机械特性方程为 或
或
能耗制动时U=0,则
,即能耗制动的机械特性是一条过坐标原点的直线,斜率为 ,特性曲线如图4-32所示。
,特性曲线如图4-32所示。
在特性曲线A点处,其n>0,Te>0,Te为驱动转矩。开始制动时,因n不能突变(能量不能突变),工作点将沿水平方向跃变到能耗制动特性曲线上的B点。在B点,n>0,Te<0,电磁转矩转变为制动转矩,于是电动机开始减速,工作点沿BO方向移动。(https://www.xing528.com)
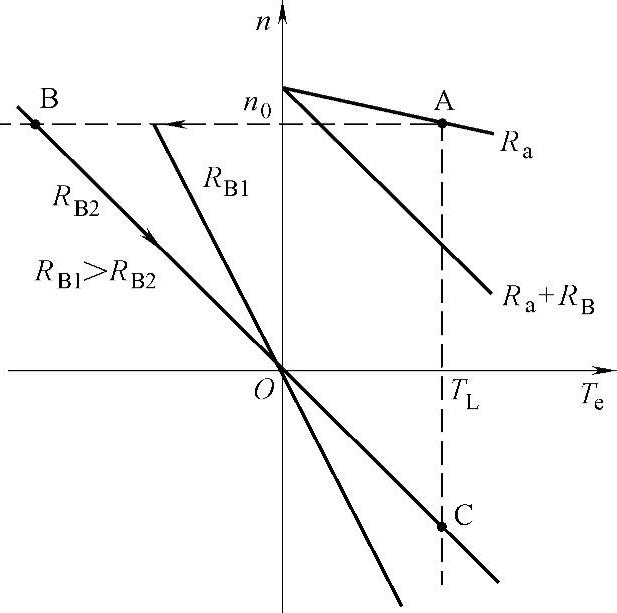
图4-32 能耗制动机械特性

若电动机拖动反抗性负载,则工作点到达O点时,n=0,Te=0,电动机便停止。若电动机拖动位能性负载,则工作点到达O点时,虽然此时n=0,Te=0,但在位能负载的作用下,电动机将反向旋转并加速,工作点将沿特性曲线OC方向移动。此时Ea的方向随n的反向而反向,即n和Ea的方向均与电动状态时相反,而Ea产生的Ia方向却与电动状态时相同,随之Te的方向也与电动状态时相同,即n<0,Te>0,电磁转矩仍为制动转矩。随着反向转速的增加,制动转矩也不断增大,当制动转矩与负载转矩平衡时,电动机便在某一转速下处于稳定的制动状态运行,即匀速下放重物,如图4-32中的C点,这时电动机处于制动运行状态。
能耗制动过程中,起始制动转矩的大小与外接制动电阻RB的大小有关。外接制动电阻越大,制动转矩越小,制动过程越慢,时间越长,但电动机不易过热;反之,外接电阻越小,制动过程越快,但电动机易过热。电动机制动电阻的大小受其过载能力的限制,即应将制动瞬间的电流限制在允许范围内,一般按下式选择制动电阻:

式中 Ea——制动瞬间的反电动势;
λ——电动机的过载系数。
能耗制动的特点是线路操作简单、经济、安全,对于反抗性负载可实现准确停车,对于位能性负载可以稳定的速度下放重物。但随着转速的下降,电动势Ea减小,制动电流和制动转矩也随之减小,制动效果变差。若为了使电动机能更快地停转,可以在转速降到一定程度时切除一部分制动电阻,使制动转矩增大,从而加强制动作用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。