



一个电力拖动系统能否稳定运行,是由电动机机械特性和负载转矩特性的配合情况决定的。把实际系统简化后,电动机的机械特性和负载转矩特性可画在同一坐标系中,图4-22给出了恒转矩负载特性和电动机的两种不同机械特性的配合情况。下面以图4-22为例,分析电力拖动系统稳定运行的条件。
系统处于稳定恒转速运行时电磁转矩Te与负载转矩TL相等,因此在图4-22中,电动机机械特性和负载转矩特性的交点A或B是系统运行的工作点。在A或B点处均满足Te=TL,且均具有恒定的转速nA或nB。但当出现扰动时,A点和B点的运行情况是有区别的。
当系统在图4-22a中的A点运行时,若扰动使转速获得一个微小的增量,则转速由nA上升到nA′,此时电磁转矩小于负载转矩,因此在扰动消失后,系统将减速,直至回到A点运行。若扰动使转速由nA下降到n″A,此时电磁转矩大于负载转矩,因此在扰动消失后,系统将加速,直至回到A点运行。可见,A点是系统的稳定运行点。
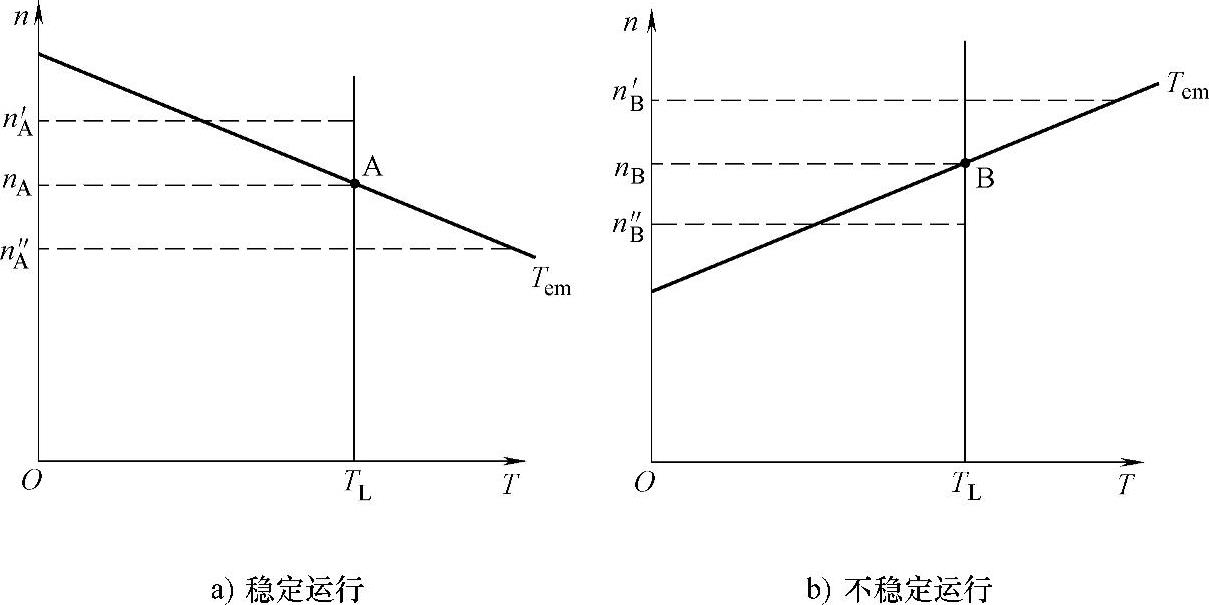
图4-22 电力拖动系统稳定运行条件(https://www.xing528.com)
当系统在图4-22b中的B点运行时,若扰动使转速由nB上升到nB′,这时电磁转矩大于负载转矩,即使扰动消失了,系统也将一直加速,不可能回到B点运行。若扰动使转速由nB下降到n″B,则电磁转矩小于负载转矩,系统将一直减速,但也不可能回到B点运行。因此,B点是不稳定运行点。
通过以上分析可知,电力拖动系统的工作点在电动机机械特性与负载特性的交点上,但并非所有的交点都是稳定工作点。由于大多数负载转矩都随转速的升高而增大或者保持恒定,因此只要电动机具有下降的机械特性,就能满足稳定运行的条件。
应当指出,上述电力拖动系统的稳定运行条件无论对直流电动机还是交流电动机都是适用的,具有普遍的意义。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。