



永磁操动机构非常重要的优点是可以精确控制,实现选相操作。其操作方法主要是对线圈电流进行相位、波形、幅值方面的控制,以实现所需的运动控制。因此永磁操动机构的控制方法是机构设计中的另外一个重要方面,本节主要介绍相关控制方法和控制精度分析。
1.双线圈变电流控制方法的原理
针对126kV输电等级真空断路器,其分闸和合闸速度曲线有特定的要求,以满足开断燃弧控制和关合防止预击穿和弹跳燃弧。为满足该要求,对永磁机构需要采取特定的控制模式。为实现该优化的分闸曲线和合闸曲线,本节提出了双线圈变电流的控制思想,同时考虑到126kV真空断路器运动质量大、控制电路IGBT频繁导通和关断难以实现,拟通过分合闸励磁线圈通电时间、通电时序来达到调整永磁机构运动特性的目标。下面以分闸过程为例,介绍双线圈变电流控制原理,如图7-31所示。

图7-31 分闸过程双线圈变电流工作原理图
a)分闸过程初始时刻 b)分闸过程中间时刻
在合闸保持位置,永久磁铁产生的磁力线如图7-31a中曲线I所示,保持动铁心在该磁场作用下受到方向向上的合闸保持力,进而通过导电杆使断路器处于合闸状态。当需要分闸操作时,首先,在分闸线圈中通以直流电流,该电流产生的磁场方向如图7-31a中曲线II所示。动铁心在该磁场作用下产生向下的驱动力,从而部分抵消了永磁体产生的吸力。当线圈电流增大到一定数值时,动铁心受到的向下的驱动力大于永磁保持力,动铁心开始向下运动,进行分闸操作。由于保持动铁心与永久磁铁间存在非工作气隙,当保持动铁心一离开合闸保持位置时,永磁体产生的磁力线如图7-31b中曲线III所示。随后,为保证断路器动触头在刚分后速度迅速降低到长燃弧开距下的速度V2以保证电弧模式尽量保持在扩散态电弧模式或点状斑点模式,给分闸线圈断电,同时给合闸线圈通电,合闸线圈产生的磁力线如图7-31b中曲线V所示。动铁心在该磁场作用下产生方向向上的阻力,阻碍动铁芯向下运动,进而达到减速的目的。合闸线圈通电一段时间后断电,机构靠运动惯性继续向下运动,直到分闸过程结束为主。
对于合闸过程,前期与分闸过程类似。即在合闸初始时刻,通过给合闸线圈通电,产生磁力线如图7-32a中曲线II所示,动铁心在该磁场作用下产生方向向上的驱动力。随着线圈电流的增大,当该电磁力大于机构所受到的分闸保持力时,动铁心开始向上运动。为保证真空断路器动、静触头在刚合位置前速度减小到一定值,以保证关合过程中预击穿电弧对触头的烧蚀最小,应在机构运动中间过程给分闸线圈通电,产生如图7-32b所示的磁力线IV。动铁心在该磁场作用下产生方向向下的电磁力,进而减小动触头的刚合速度。由于考虑到断路器动静触头闭合后,机构需提供足够的合闸功压缩触头弹簧,而线圈电流上升需要一定时间,所以合闸线圈电流一直导通。

图7-32 合闸过程双线圈变电流控制原理
a)合闸过程初始时刻 b)合闸过程中间时刻 c)合闸过程结束时刻
通过上述分析可以看出,在双稳态永磁机构中,双线圈变电流控制方式在不改变永磁机构结构的前提下,充分利用两个线圈,增加了永磁机构运动的可控性。同时,有效解决了永磁机构运动后期不易减速的问题,让其具有更好的速度特性满足断路器性能要求。
2.双线圈变电流控制仿真分析参数
本节采用ANSOFT Transient模块完成机构在双线圈变电流控制策略下的动态特性分析,双线圈控制电路原理图如图7-33所示。

图7-33 双线圈变电流控制电路原理图
如图中所示,分合闸驱动模块结构相同,均由驱动电容、控制开关构成。控制开关设置为理想开关,不考虑开关自身导通或关断时电流上升或者下降的时间,在实际回路中设置续流回路,当将线圈断电后,线圈电流通过续流回路放电。在仿真中,质量配置归算了所有运动部件质量,包括机构运动动铁心、导杆、动触头、绝缘拉杆等质量,共30kg;反力通过反力子函数加载,包括了动触头、绝缘拉杆以及触头弹簧施加在动铁心上的反力,永磁机构受到的永磁力则在ANSOFT中实时求解。双线圈变电流仿真参数见表7-10。
表7-10 双线圈变电流仿真参数

3.分闸过程控制策略与仿真
首先,计算得到仅分闸线圈通电时,机构运动特性如图7-34所示。此时,动铁心运动启动时间t=34ms,触头刚分时刻t0=46.2ms。考虑到控制系统可靠性,在实际应用中尽量避免IGBT频繁接通或关断,即尽量保证每次导通或关断IGBT的脉宽在10ms以上。所以,在研究双线圈供电对机构动态特性的影响时,仅考虑IGBT一次操作。根据所要求的优化分闸曲线,机构需要在触头刚分时刻有较快速度达到d1开距,尽量避免燃弧模式进入强电弧模式;随后,以一个相对较慢的速度达到d2开距,尽量避免燃弧模式进入阳极斑点模式,以减少电弧对触头的烧蚀。由于该机构总行程为84mm,真空灭弧室开距为60mm,超行程为24mm,并且从图7-34可知,机构运动到d1开距时,V1=3.4m/s,能满足126kV真空断路器速度要求;而对于在d2开距内,V2=3.3m/s,大于126kV真空断路器速度要求。因此,有必要对V2速度进行调节。
永磁机构由于线圈电感L的存在,线圈电流上升较慢,为减轻控制器的负担,避免IGBT频繁通断,现通过两种方案对机构速度进行调整。

图7-34 单线圈供电时机构的分闸位移曲线
(1)在分闸线圈断电时,合闸线圈同时通电
当分闸线圈单独通电,在时刻t0=52ms时动静触头开始分离,即从动铁心位移为60mm,机构刚走完超行程。所以,仿真计算分别得到分合闸线圈断电、通电的时刻t=40~52ms的机构位移特性,其控制时序如图7-35所示。从图中可以看出,为防止机构分闸运动没有到位,在t1=90ms,即分闸操作结束后,给分闸线圈通电PW_O2=10ms,使其可靠运动到分闸保持位置。在分闸线圈断电时、合闸线圈同时通电的典型位移曲线如图7-36所示。此时,t=40ms,即在分闸线圈通电40ms后,分闸线圈断电,同时合闸线圈通电,且通电时长PW_C=30ms。从图中可以看出,在此控制策略下,V1由单线圈通电时的3.4m/s降低到3.3m/s,而V2由原来的3.3m/s降低到2.8m/s。

图7-35 双线圈分闸过程控制时序图1(在分闸线圈断电时,合闸线圈通电)
对于分闸操作,触头打开20mm后希望机构速度减小,以减轻分闸时的冲击。通过仿真,得到双线圈在分闸线圈断电时合闸线圈通电的速度与时间Δt的关系如图7-37所示。从图中可以看出,当Δt=10ms时,V1将不再满足V1≥3.3m/s的速度要求,而通过线性拟合,可得V2=3.61-0.07Δt(Δt=5.9~10ms)。所以,在满足V1速度要求的情况下,可根据V2实际要求通过双线圈通电调整断路器速度,V2的调速范围为2.9~3.2m/s。

图7-36 分闸线圈断电、同时合闸线圈通电的调速效果图(t=40ms,Δt=30ms)(https://www.xing528.com)
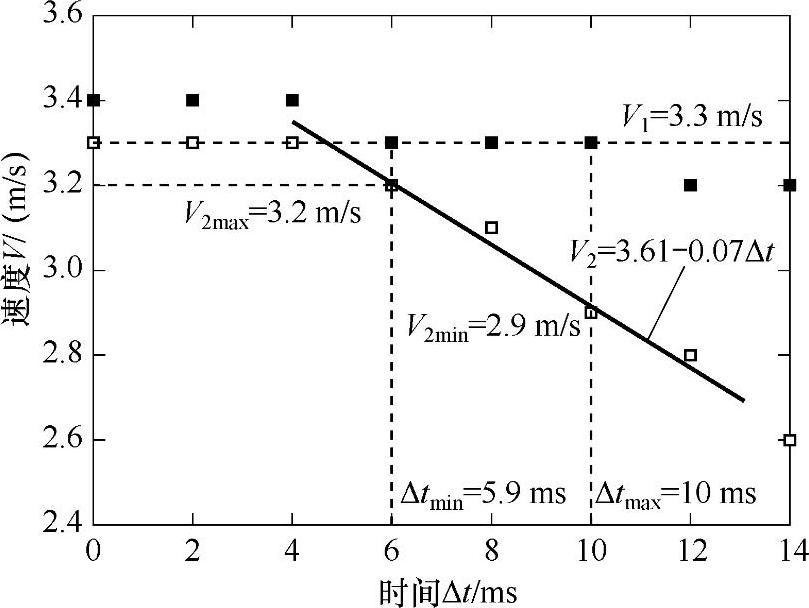
图7-37 分闸线圈断电时合闸线圈通电的速度与时间Δt的关系
(2)分闸线圈断电时刻不变,调整合闸线圈通电时刻
为保证足够的V1速度,在断路器动触头运动到20mm开距时,分闸线圈断电。为研究在此情况下,合闸线圈通电对机构速度的影响,分别调整合闸线圈通电时刻,得到机构的速度特性,其控制时序图如图7-38所示。从图中可以看出,分闸线圈通电t=PW_O1=46ms时断电,合闸线圈在t=(46-Δt)时通电,通电时长PW_C=30ms。通过改变Δt,可得到机构速度特性与Δt的关系如图7-39所示。

图7-38 双线圈分闸过程控制时序图2(分闸线圈断电时刻不变,合闸线圈通电时刻不同)

图7-39 速度与时间Δt的关系(分闸线圈在t=46ms时断电,合闸线圈在46-Δt时通电)
从图中可以看出,当Δt=14ms时,V1将不再满足V1≥3.3m/s的速度要求,而通过线性拟合,可得V2=3.3-0.024Δt(Δt=4.2~14ms)。所以,在满足V1速度要求的情况下,可根据V2实际要求通过双线圈通电调整断路器速度,V2的调速范围为3.06~3.2m/s。与方案一即图7-37比较可知,为提高线圈工作效率,在分闸过程需降低分闸速度时,易采用分闸线圈断电、合闸线圈通电的方式。
4.合闸过程控制策略与仿真
与分闸过程相同,先计算得到仅靠合闸线圈通电机构运动特性,如图7-40所示。从图中可以看出,触头运动到开距20mm、40mm和60mm的时间分别为60.8ms、68.2ms和75.0ms。因机构为满足同步关合速度要求,VC≥1.86m/s;而根据基于最小电弧能量的优化合闸曲线,VC仅为1.1m/s。所以,不但要减少因预击穿和触头弹跳引起的电弧对触头的烧蚀,又要满足断路器同步关合要求,VC应尽量靠近Vcrit_C,即VC尽量逼近1.86m/s。

图7-40 单线圈供电时机构的合闸位移曲线
(1)合闸线圈断电时,分闸线圈同时通电
当仅靠合闸线圈通电,到t2=68.2ms时动触头运动到闭合前1/3开距(即开距20mm);t3=75.0ms时,动静触头闭合。为减少触头闭合前1/3开距内的平均速度,使合闸线圈在t2时刻之前断电,而分闸线圈同时通电,控制时序如图7-41所示。与分闸过程不同,在触头闭合时,动触头将压缩触头弹簧,为保证在动静触头闭合时,机构能够提供足够的能量压缩触头弹簧,在t=70ms时,使合闸线圈通电(PW_C2=50ms),确保动静触头闭合时不发生反弹。在分闸线圈断电时、合闸线圈同时通电的典型位移曲线如图7-42所示。此时,t=56ms,即在合闸线圈通电56ms后,合闸线圈断电,同时分闸线圈通电,且通电时刻PW_O=20ms。从图中可以看出,在此控制策略下,VC由单线圈通电时的2.94m/s降低到1.89m/s。

图7-41 双线圈合闸过程控制时序图1(在合闸线圈断电时,分闸线圈通电)

图7-42 合闸线圈断电时分闸线圈同时通电的位移曲线(t=56ms,PW_O=20ms)
计算不同Δt时机构的运动特性,得到平均合闸速度VC与时间Δt的关系如图7-43所示。从图中可以看出,当Δt=12ms时,VC<1.86m/s的速度要求,而通过线性拟合,可得VC=3.04-0.089Δt(Δt=0~12ms)。所以,VC的调速范围为1.8~2.9m/s。

图7-43 分闸线圈断电时合闸线圈通电时的速度与时间Δt的关系
(2)仅通过合闸线圈PWM控制进行调速
考虑到合闸调速相对没有时间要求,所以可考虑仅通过控制合闸线圈通断电完成调速要求,控制时序如图7-44所示。通过调整不同Δt值,得到平均合闸速度VC与Δt关系如图7-45所示。从图中可以看出,当Δt>16ms时,VC<Vcrit_C,VC=3.04-0.074Δt(Δt=0~16ms),此时,平均合闸速度调速范围为1.8~2.9m/s,能满足126kV真空断路器速度要求。
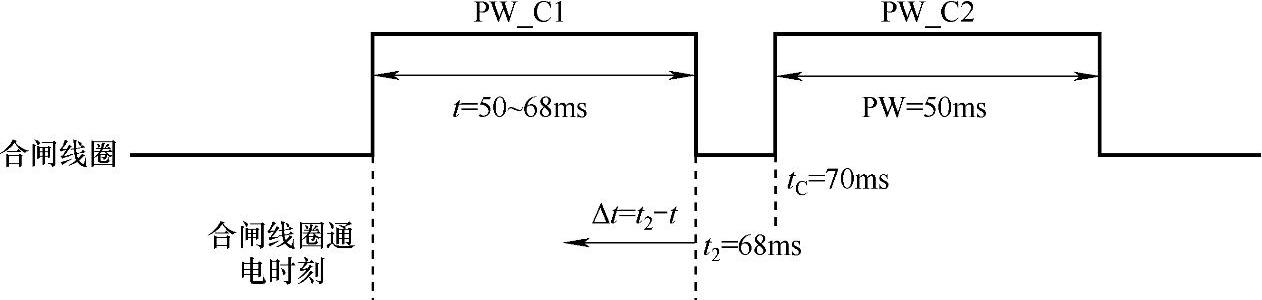
图7-44 仅通过合闸线圈PWM控制

图7-45 合闸过程仅通过合闸线圈通电控制的速度与时间Δt关系
通过对上述控制策略的分析可知,对于合闸过程,如果不考虑固合时间的要求,可以考虑仅通过对合闸线圈进行PWM控制的方式,达到对机构速度的调节要求。否则,可考虑双线圈供电模式,从而达到机构的快速调整。
输电等级真空断路器对操作的机械动态特性提出了更为复杂的要求。永磁机构因其具有速度特性可调节的特点,更适合于对速度特性要求复杂的工况。本节从基于高压真空断路器电弧模式的优化分闸特性曲线和满足同步关合角度和基于最小预击穿电弧能量的优化合闸特性曲线,结合高电压等级真空断路器永磁机构的特点,提出了能满足上述分合闸特性的永磁机构控制策略。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。