



弹簧操动机构合闸系统是一种简单而可靠的机构,它能够通过预先储存在合闸弹簧内的能量在短时间内产生很强的操作功。在真空断路器弹簧操动机构中使用凸轮连杆机构,其中的连杆结构的作用是传递运动,而凸轮结构的作用则是改变弹簧的输出力特性。弹簧操动机构是否能与真空断路器负载很好地匹配,关键在于凸轮机构的合理设计。由于凸轮机构改变输出力特性,所以其运动规律的变化对输出力特性以及合闸速度影响很大。
在断路器操动机构中,由于凸轮的转速既不是常量也不是已知量,而且这类系统中凸轮与从动件在动力学特性上有着较强的相互作用,因此常规的凸轮设计方法并不适用。Bankan曾就带有凸轮的弹簧操动机构的设计做过详细介绍,其中考虑了若干弹簧机构的性能要求,包括机构的摩擦、反力特性、以及凸轮的斜率等。然而到目前为止,大多数传统的凸轮设计都是以断路器的负载力矩曲线为出发点,找到一条满足负载特性的凸轮输出力矩曲线,从而得到凸轮的轮廓。采用上述方法得到的凸轮通常只能保证开关行程的要求,而输出力和合闸速度等特性则要通过多次试验方能确定。这种设计方法的缺点不仅仅是在于设计周期长、成本高,而且还不能保证机构的合闸动作特性符合机构的设计目标。
为了有效地克服传统凸轮设计方法的缺点,西安交通大学的研究人员发明了一种新的凸轮设计方法。该方法与传统设计流程不同,它首先根据真空断路器的合闸行程曲线,得到每个时刻对应的动能以及该时刻输出轴的转角,然后根据负载力矩曲线得到该时刻合闸弹簧所需要的能量,从而得到储能轴的转角,根据输出轴与储能轴转角增量的比值直接确定凸轮的轮廓曲线。
图7-7所示为126kV真空断路器配CT20弹簧操动机构的合闸运动示意图。当操动机构接到合闸指令时,合闸弹簧开始向下运动释放能量,从而带动储能轴以及储能轴上的凸轮顺时针转动。凸轮与输出轴上的滚轮是直接接触的,因此,在凸轮的驱动下,输出轴将逆时针旋转,一方面将分闸弹簧向下运动储存能量以便能够快速分闸,另一方面,输出轴通过连杆机构与灭弧室相连,能够驱动动导杆向上进行合闸运动。当触头开距运动完后,动导杆停止运动,而绝缘拉杆还将在机构的作用下继续运动,从而压缩触头弹簧直到机构行程结束。因此,在整个合闸运动过程中,凸轮的作用归根结底就是将合闸弹簧的能量加以分配,传递到分闸弹簧、触头弹簧中以及驱动真空断路器整体运动。该弹簧操作机构本质上可以被视为两个分开的独立装置,这两个装置由凸轮联系起来以使系统达到一定的动态特性。可以看出,凸轮的理想轮廓线可以通过输出轴与储能轴转角的变化求出。(https://www.xing528.com)
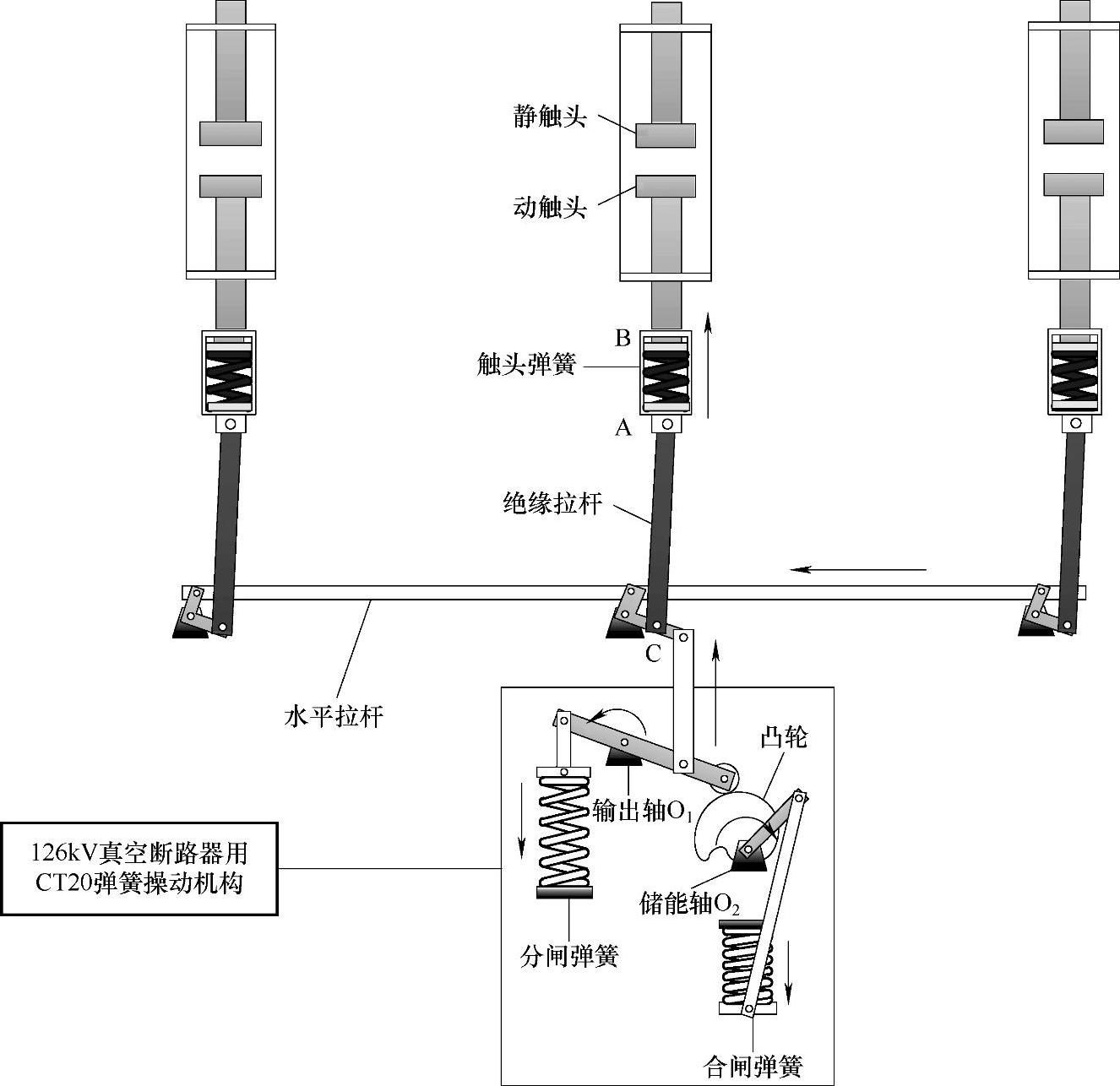
图7-7 126kV真空断路器合闸运动特性示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。