



人工神经网络控制作为一种不依赖模型的控制方法,十分适合于非线性控制。因此基于神经网络的智能控制方法也被用于并网光伏逆变器的MPPT技术中。
本节以检测信号为电压的MPPT控制器为例,介绍最基本的神经网络算法及其在并网光伏逆变器MPPT控制中的应用。
6.5.2.1 基本原理
在并网光伏发电系统中,基于神经网络的MPPT控制器可以利用三层前馈神经网络与PID控制器相结合来控制逆变器以使光伏电池工作在最大输出功率状态。如图6-28所示,系统要求控制环节实时估算出光伏电池的最大功率点,神经网络算法恰恰可以满足这一要求。与自寻优类MPPT方法不同的是,神经网络算法在投入使用前,需要对大量的数据样本进行学习记忆,当某一最大功率点输出的条件满足时,算法输出该最大功率点。
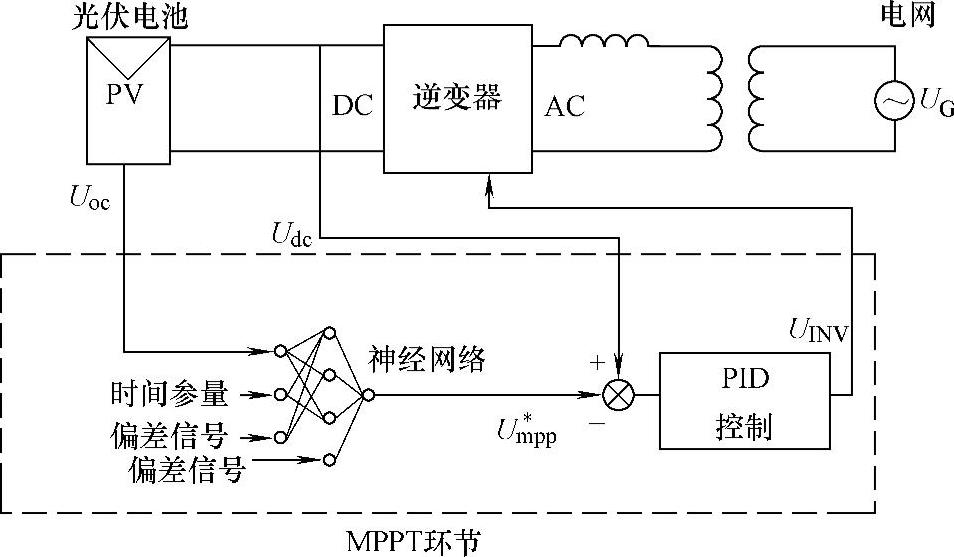
图6-28 基于神经网络的MPPT控制器的控制结构图
本例中使用的是以光伏电池的开路电压Uoc和时间参数Tp为输入信号的三层神经网络。在工作过程中,算法基于输入的开路电压Uoc和时间参数Tp的信息估算出实时的最大功率点电压值Um∗pp。并将Um∗pp与相同的采样频率下采得的输出电压Udc进行比较,比较后的结果作为PID调节器的输入,在调节器输出端得到逆变器的控制信号,从而调节工作电压Udc跟踪最大功率点电压Um∗pp。
6.5.2.2 神经网络控制过程
三层前馈神经网络结构如图6-29所示,它的作用是辨识光伏电池的最大功率点电压Um∗pp。神经网络包括三层:输入层、隐层和输出层,三层中神经元的数目分别为3、5、1。输入层神经元的输入信号是检测单元得到的开路电压Uoc和控制器定时器输出的时间参数Tp,输入层的信号直接传到隐层中的神经元,输出层的输出就是辨识得到的最大功率点电压U∗mpp。
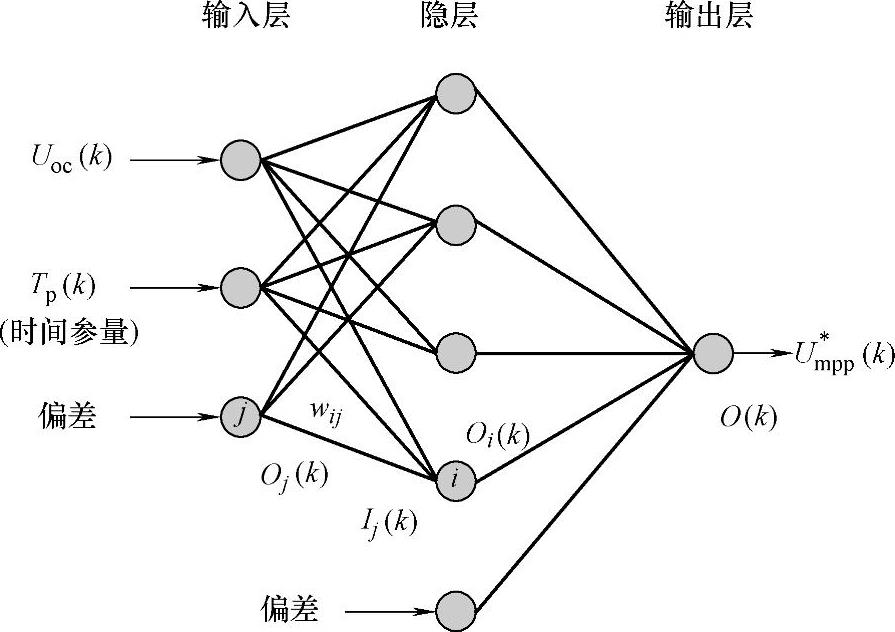
图6-29 三层前馈神经网络结构
对于隐层和输出层的每个神经元的输出函数为(https://www.xing528.com)

其中,函数Oi(k)用来定义神经元的输入-输出特性,Ii(k)是用第k个采样样本训练时神经元i的输入信号。输入信号Ii(k)实际上是前一层输出的加权和,即

其中,wij是神经元j和i间的连接权值,Oj(k)是神经元j的输出信号。
为了精确地确定最大功率点,连接权值必须由典型的样本数据确定。确定连接权值的过程就是训练过程。神经网络的训练需要一组输入-输出样本数据。训练过程中所有的计算都是在离线状态下完成的。连接权值被递归地调整直到能最好地满足训练样本数据要求的输入-输出模式。在训练结束时达到均方差最小,即

其中,N是总的训练样本数,t(k)是第k个训练样本输入时期望的输出层输出,O(k)是实际的输出。
为了进一步验证控制方案的可行性,可将神经网络控制器应用到能自动追踪太阳的光伏系统中,并用下式来评价估计误差:
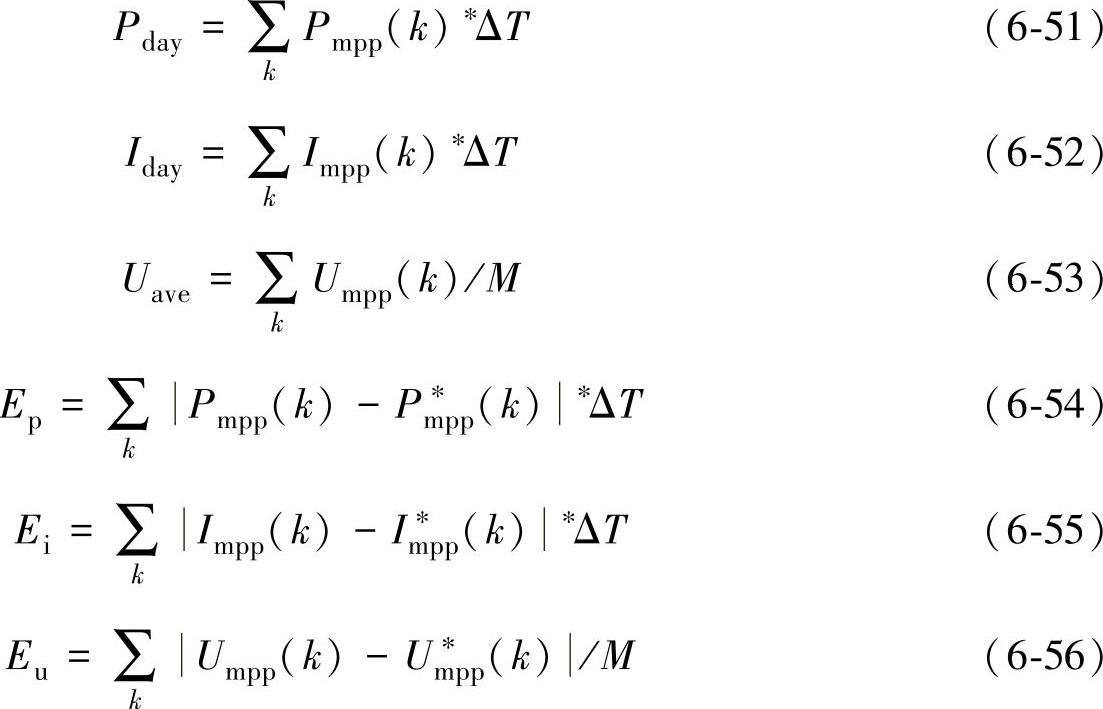
其中,M是一天中总的样本数,Pmpp(k)、Impp(k)、Umpp(k)分别为测量得到的最大功率及其对应的最优电流和电压。Pm∗pp(k)、Im∗pp(k)、Um∗pp(k)是期望的对应值。Ep、Ei、Eu分别为一天内最大功率及对应最优电流的总的误差和最优电压的总的平均误差,Pday、Iday和Uave分别为一天中总的最大功率、总的最优电流和总的平均最优电压。
当光伏电池的分布范围较广时可以在光伏电池中设定多样的开路电压检测单元来获取精确的信息以便确定最大功率工作点电压。实际中辐照度变化较慢时端电压能够连续地跟踪最大功率点电压,当辐照度变化较快时该控制器同样可以做到实时的跟踪控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。