



与扰动观测法类似,电导增量法也存在振荡和误判问题,分别讨论如下。
6.4.2.1 电导增量法的振荡分析
由于INC法在实际数字实现时,一般用 来代替
来代替 ,因此,当在最大功率点附近一个步长范围内搜索工作点电压时,会出现工作点在最大功率点两边振荡的情形,这就是INC法的振荡问题。
,因此,当在最大功率点附近一个步长范围内搜索工作点电压时,会出现工作点在最大功率点两边振荡的情形,这就是INC法的振荡问题。
为分析方便,将P-U特性曲线与U-I特性曲线组合,如图6-20所示。考虑到INC法的判据 ,应当将
,应当将 、
、 在U-I特性曲线图中表示出来。由于
在U-I特性曲线图中表示出来。由于 、
、 、
、 都是单调函数簇,所以可以用其绝对值
都是单调函数簇,所以可以用其绝对值 ,
, ,
, 进行具体分析,即可以将
进行具体分析,即可以将 、
、 、
、 映射到U-I特性曲线坐标的第一象限,并在U-I特性曲线中表示出来,从而与P-U特性曲线建立直观的联系,以便从组合的曲线图上对电导增量法做进一步分析。
映射到U-I特性曲线坐标的第一象限,并在U-I特性曲线中表示出来,从而与P-U特性曲线建立直观的联系,以便从组合的曲线图上对电导增量法做进一步分析。
在如图6-20所示的U-I特性曲线上,当工作点从U1变动到U2时, 表示的是工作点在U2这一点时切线的斜率;
表示的是工作点在U2这一点时切线的斜率; 表示的是弦U1U2的斜率;
表示的是弦U1U2的斜率; 表示的是点(U2,I2)与原点连线的斜率。
表示的是点(U2,I2)与原点连线的斜率。
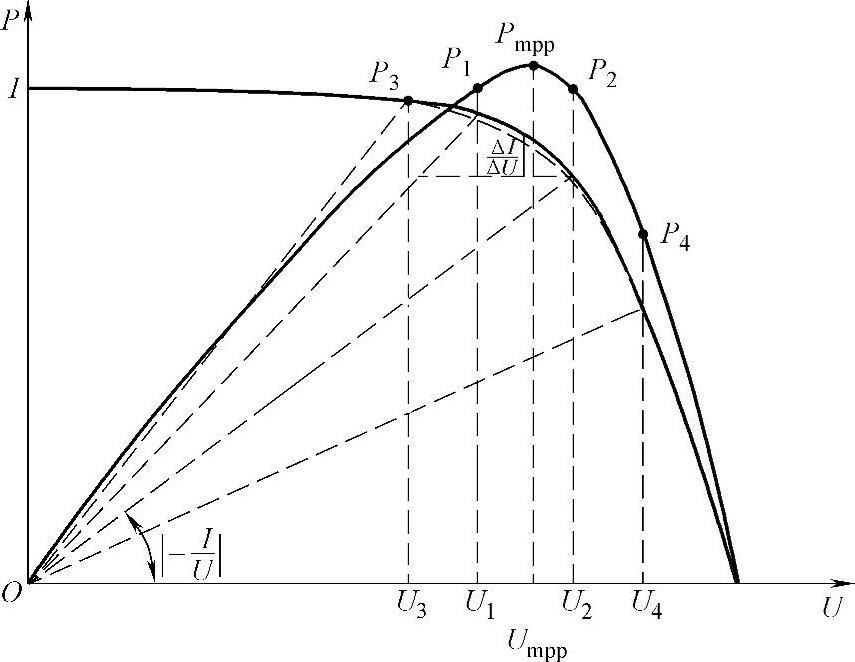
图6-20 电导增量法P-U、U-I特性曲线
由图6-20可以看出: 和
和 是单调增函数簇;
是单调增函数簇; 所构成的函数则是单调减函数簇。于是得出以下结论:
所构成的函数则是单调减函数簇。于是得出以下结论:
当 时,工作在最大功率点左侧;
时,工作在最大功率点左侧;
当 时,工作在最大功率点;
时,工作在最大功率点;
当 时,工作在最大功率点右侧。
时,工作在最大功率点右侧。
显然,当采用 代替
代替 时,有
时,有
当 时,工作在最大功率点左侧;
时,工作在最大功率点左侧;
当 时,工作在最大功率点;
时,工作在最大功率点;
当 时,工作在最大功率点右侧。
时,工作在最大功率点右侧。
从图6-20中很容易得出:
当ΔU>0时,即往右搜索时,则 ;
;
当ΔU<0时,即往左搜索时,则 。
。
基于以上分析,当采用INC法时,在最大功率点处会出现三种工作状态:第一种工作状态为稳定在一点的工作状态(非MPP点);第二种工作状态为两点振荡工作状态;第三种工作状态为三点振荡工作状态。
下面详细分析这三种状态:
如图6-20所示,假设系统工作在最大功率点左边U1处,当加上ΔU时,会出现两种情况:第一种情况工作点恰好工作在最大功率点Um;第二种情况工作点工作在最大功率点右侧U2点(如果U2点仍然处于最大功率点左边,则仍看做U1)。
根据上面分析, 为减函数簇,即每个电压值对应着惟一的
为减函数簇,即每个电压值对应着惟一的 值。如果恰巧运行在最大功率点,那么这一点处的
值。如果恰巧运行在最大功率点,那么这一点处的 。但实际中采用的判据
。但实际中采用的判据 要么大于
要么大于 ,要么小于
,要么小于 ,不可能在MPP点处等于
,不可能在MPP点处等于 ,即系统不可能运行在实际MPP点。这样只需考虑上述的第二种情况,即工作在U2点的工作情况。
,即系统不可能运行在实际MPP点。这样只需考虑上述的第二种情况,即工作在U2点的工作情况。
此时 和
和 的大小关系会出现以下3种可能性:
的大小关系会出现以下3种可能性:
1)当 时,系统判定此时工作点工作在最大功率点右侧,则将电压值减去ΔU,即回到U1点,此时同样会产生3种可能性:
时,系统判定此时工作点工作在最大功率点右侧,则将电压值减去ΔU,即回到U1点,此时同样会产生3种可能性:
a)当 时,系统判定此时仍然工作在最大功率点右侧,则继续减去ΔU,使得系统工作在U3处,根据切线及拉格朗日定理,U3处的
时,系统判定此时仍然工作在最大功率点右侧,则继续减去ΔU,使得系统工作在U3处,根据切线及拉格朗日定理,U3处的 必定为U1~U3之间的某一点的导数值,又因为
必定为U1~U3之间的某一点的导数值,又因为 构成的函数为增函数,所以U1~U3之间的任一导数值
构成的函数为增函数,所以U1~U3之间的任一导数值 都小于最大功率点处的导数值,所以U3处的
都小于最大功率点处的导数值,所以U3处的 必定小于最大功率处的导数值,也就是小于最大功率点处的
必定小于最大功率处的导数值,也就是小于最大功率点处的 。另外,因为
。另外,因为 为减函数,所以在U3处必定有
为减函数,所以在U3处必定有 ,即系统判定此时工作点运行在最大功率点左侧,这样系统便会在U1-U2-U3之间形成三点振荡。
,即系统判定此时工作点运行在最大功率点左侧,这样系统便会在U1-U2-U3之间形成三点振荡。
b)当 时,则系统判定U1点为最大功率点,虽然能稳定在U1点运行,但其并非真正的最大功率点。
时,则系统判定U1点为最大功率点,虽然能稳定在U1点运行,但其并非真正的最大功率点。
c)当 时,系统判定运行在最大功率点左侧,这样系统便会形成U1-U2两点振荡的情况。
时,系统判定运行在最大功率点左侧,这样系统便会形成U1-U2两点振荡的情况。
2)当 时,系统判定U2点为最大功率点,虽然能稳定在U2点运行,但其并非真正的最大功率点。
时,系统判定U2点为最大功率点,虽然能稳定在U2点运行,但其并非真正的最大功率点。
3)当 时,系统仍然判定此时工作点工作在最大功率点左侧(实际中已经工作在右侧,属于误判),因此会继续增加ΔU,跟1)中
时,系统仍然判定此时工作点工作在最大功率点左侧(实际中已经工作在右侧,属于误判),因此会继续增加ΔU,跟1)中 的证明一样,可以证明U4点处的
的证明一样,可以证明U4点处的 ,即系统判定此时工作点运行在最大功率点右侧。则系统电压值减去ΔU回到U2点,然后再减去ΔU回到U1点,从U2到U1点同样可能会产生
,即系统判定此时工作点运行在最大功率点右侧。则系统电压值减去ΔU回到U2点,然后再减去ΔU回到U1点,从U2到U1点同样可能会产生 、
、 、
、 三种情形。
三种情形。
当 时,根据上述1)中
时,根据上述1)中 的证明过程,可以判定从U2到U1的
的证明过程,可以判定从U2到U1的 必定为U1到U2中某一点的导数值
必定为U1到U2中某一点的导数值 ,又因为
,又因为 为增函数,所以U1到Um中某一点的导数值
为增函数,所以U1到Um中某一点的导数值 必定小于最大功率点处的导数值。同理
必定小于最大功率点处的导数值。同理 为减函数,所以U1点处的
为减函数,所以U1点处的 必定大于最大功率点处的导数值
必定大于最大功率点处的导数值 ,那么也就大于从U2到U1的
,那么也就大于从U2到U1的 ,所以3)情形下,
,所以3)情形下, 和
和 是不可能出现的。
是不可能出现的。
因此,可以得到此时惟一能出现的就是 ,即系统判定工作点运行在最大功率点左侧,这样便形成U1-U2-U4的三点振荡情况。
,即系统判定工作点运行在最大功率点左侧,这样便形成U1-U2-U4的三点振荡情况。
6.4.2.2 电导增量法的误判分析
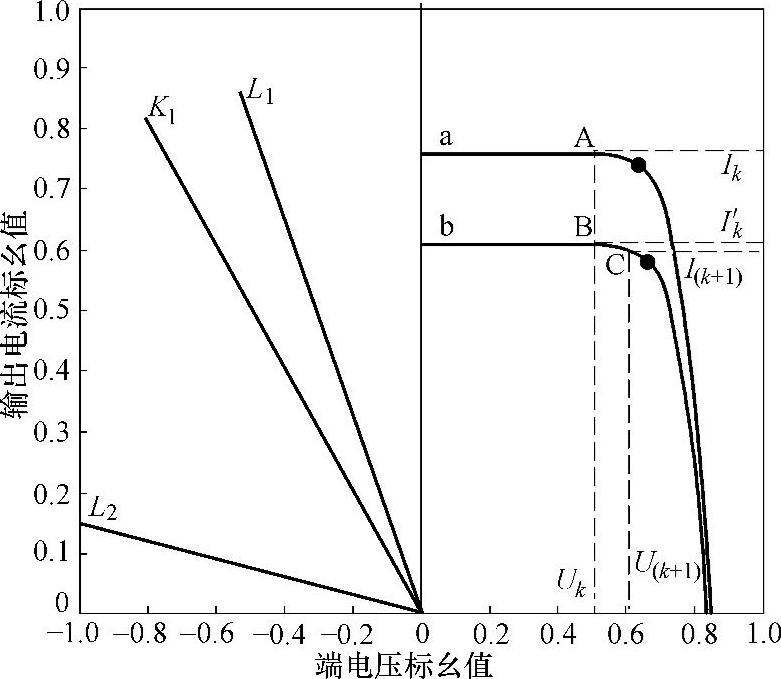
图6-21 一种辐照度变化情形下的误判情形示意图
当外界辐照度发生突变时,同扰动观测法一样,使用电导增量法进行最大功率点跟踪时也会出现误判现象。
如图6-21所示为光伏电池的U-I特性曲线,在某一时刻的a辐照度下,系统工作在A点,工作点电压为Uk。此刻若辐照度变化为b,则光伏电池输出的U-I特性曲线也相应发生变化,从而使工作点由A点变动至B点。由于此刻存储在MPPT系统中采样点的信息仍然为a辐照度下U-I特性曲线上的信息,因此,系统将保持先前曲线上的搜索方向不变,工作点电压变为Uk+1,即工作点由B点移动到C点,基于A点和C点的采样信息,MPPT系统做出相应的MPP搜索判断。
由于A点和C点分别是系统在辐照度变化前、后的工作点,即A点和C点分别隶属于不同的输出U-I特性曲线,这样便会出现由A点到C点采样值的变化趋势与实际输出U-I特性曲线不一致的情形,从而导致误判。
在图6-21所示的情形中, 是C点与原点连线K1的斜率负值,
是C点与原点连线K1的斜率负值, 为A点和C点连线L1斜率,
为A点和C点连线L1斜率, 为B点和C点连线L2斜率,显然有:
为B点和C点连线L2斜率,显然有:

 (https://www.xing528.com)
(https://www.xing528.com)
使用电导增量法作为MPPT算法时,系统使用ΔI/ΔU和-I/U进行比较,以决定搜索方向。显然,当辐照度发生变化时,若以 和
和 相比较,则不会发生误判。但由于实际上MPPT算法是以
相比较,则不会发生误判。但由于实际上MPPT算法是以 和
和 相比较,若
相比较,若 和
和 的比较关系与
的比较关系与 和
和 的比较关系一致时,系统不会发生误判,反之则必发生误判。从图6-21中可以看出,由于
的比较关系一致时,系统不会发生误判,反之则必发生误判。从图6-21中可以看出,由于 ,则系统发生误判。
,则系统发生误判。
考虑到辐照度变化前后的工作点可能位于MPP的同侧和异侧,因此以下针对两种辐照度变化情况时产生的误判情形进行具体分析,分析时假定辐照度不发生持续的变化。
1.工作点位于最大功率点同侧时的情形
当辐照度发生变化时,工作点位于MPP同侧时,其MPPT的情形包括:
1)往工作点电压增大的方向搜索时,辐照度发生变化前后的工作点均位于MPP左侧,辐照度减小和增大的情形分别如图6-22a和图6-22c所示。
2)往工作点电压减小的方向搜索时,辐照度发生变化前后的工作点均位于MPP右侧,辐照度增大和减小的情形分别如图6-22b和图6-22d所示。
若系统初始工作在a辐照度下U-I特性曲线上的A点处,工作点电压为Uk:
在图6-22a和图6-22c中,工作点位于MPP左侧,系统往工作点电压增大的方向搜索MPP。若辐照度突变为b,工作点从A点变动到B点,此时由于系统仍按照在a辐照度下记录的采样点信息进行判断,因此工作点电压将假定继续增大,工作点由B点移动至C点。
在图6-22b和图6-22d中,工作点位于MPP右侧,系统向工作点电压减小的方向搜索MPP,假定系统仍保持向电压减小的方向搜索到C点。
下面对与系统工作点移动到C点产生的误判情形进行具体分析。
1)图6-22a中,已知工作点位于MPP左侧,若辐照度减小,工作点则沿电压增大方向移动至C点。由于系统是运用A点和C点的信息进行判断的,考虑到
 ,即
,即

由此,系统判断出工作点运行于MPP右侧,并会减少工作点电压,从而导致误判现象的发生。图6-22d的情形与之类似。
2)图6-22b中,已知工作点位于MPP右侧,若辐照度增大,工作点将沿电压减小方向移动至C点,考虑到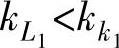 ,即
,即

由此,系统判断出工作点运行于MPP右侧,并会继续减少工作点电压,从而不会发生误判现象。图6-22c情形与之类似。
以上分析表明:当工作点位于最大功率点同侧时,若辐照度增大时不会发生误判现象,而当辐照度减小时则会发生误判现象。
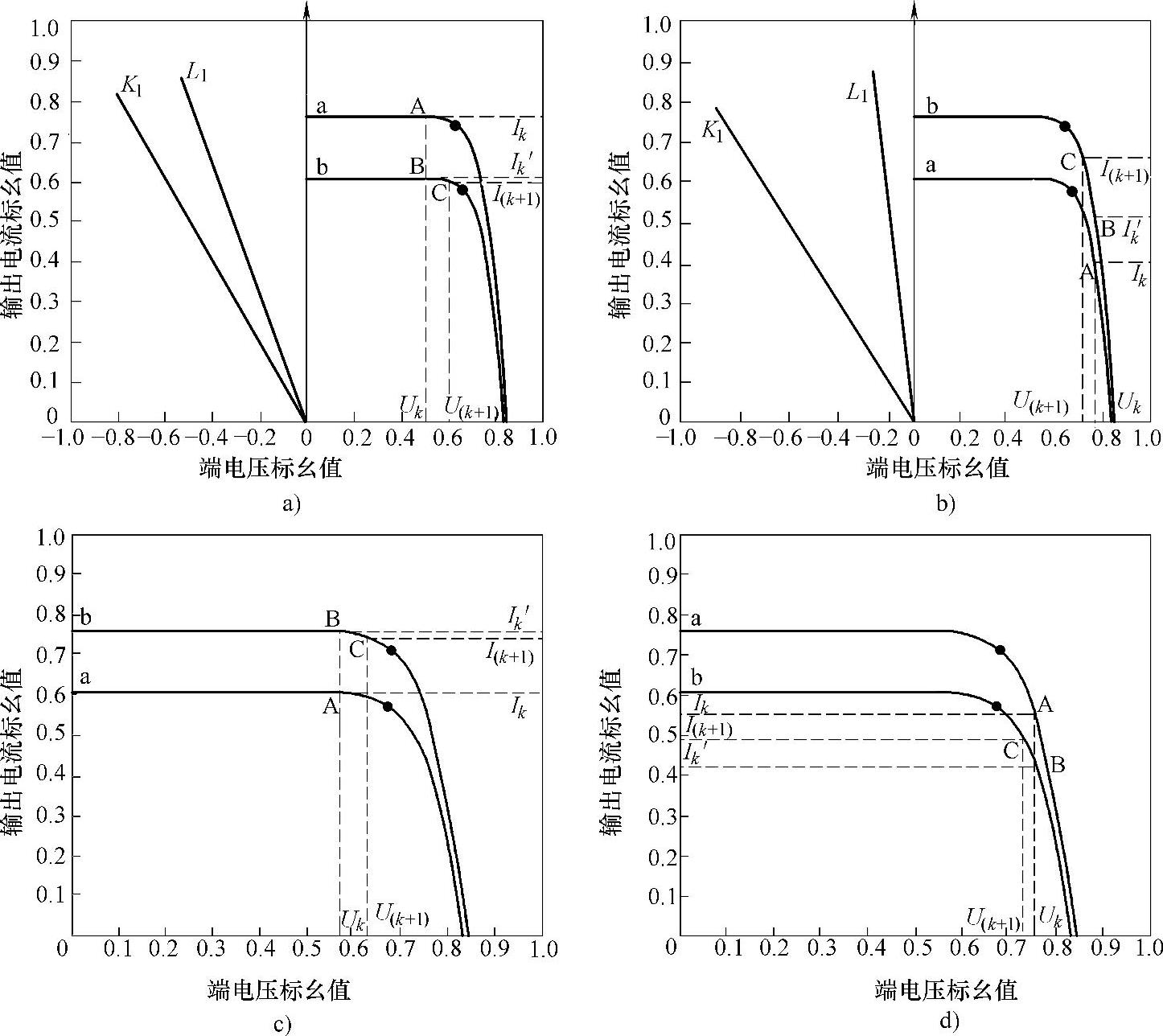
图6-22 辐照度变化前后工作点位于MPP同侧情形示意
a)辐照度减小,工作点A位于MPP左侧 b)辐照度增大,工作点A位于MPP右侧 c)辐照度增大,工作点A位于MPP左侧 d)辐照度减小,工作点A位于MPP右侧
2.工作点位于最大功率点异侧时的情形
若辐照度发生变化,工作点位于MPP异侧时,其MPPT的情形包括:
1)往工作点电压增大的方向搜索时,辐照度变化前后的工作点相继位于MPP左侧和右侧,辐照度减小和增大的情形如图6-23a和图6-23c所示。
2)往工作点电压减小的方向搜索时,辐照度变化前后的工作点相继位于MPP右侧和左侧,辐照度增大和减小的情形如图6-23b和图6-23d所示。
图6-23 辐照度变化前后工作点位于MPP异侧情形示意
a)辐照度减小,工作点A位于MPP左侧 b)辐照度增大,工作点A位于MPP右侧 c)辐照度增大,工作点A位于MPP左侧 d)辐照度减小,工作点A位于MPP右侧
若系统初始工作在a辐照度下U-I特性曲线上的A点处,工作点电压为Uk:
图6-23a和图6-23c情形中,A点位于MPP左侧,系统往工作点电压增大的方向搜索MPP,此时若辐照度突变为b,工作点将从A点变动到B点。由于系统仍按照在a辐照度下记录的采样点信息进行判断,因此,工作点电压将继续增大,从而使工作点由B点移动至C点。与图6-22不同的是,此时C点位于MPP右侧。
图6-23b和图6-23d中,A点位于MPP右侧,系统向工作点电压减小的方向搜索MPP,分析与上述类似,最终C点位于MPP左侧。
下面对图6-23中工作点移动到C点产生的误判情形进行具体分析。
1)图6-23a中,当辐照度减小时,工作点将沿电压增大方向移动至位于MPP右侧的C点。由于系统是运用A点和C点的信息进行判断的,考虑到kL1<kk1,即

由此,系统判断出工作点运行于MPP右侧,并减少工作点电压,从而不会发生误判现象。图6-23d情形与之类似。
2)图6-23b中,当辐照度增大时,工作点将沿电压减小方向移动至位于MPP左侧的C点,考虑到 ,即
,即

由此,系统判断出工作点运行于MPP右侧,并继续减少工作点电压,从而导致误判现象的发生。图6-23c情形与之类似。
由以上分析可知,当工作点位于最大功率点异侧时,若辐照度减小,则不会发生误判现象,而当辐照度增大时,则会发生误判现象。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。