



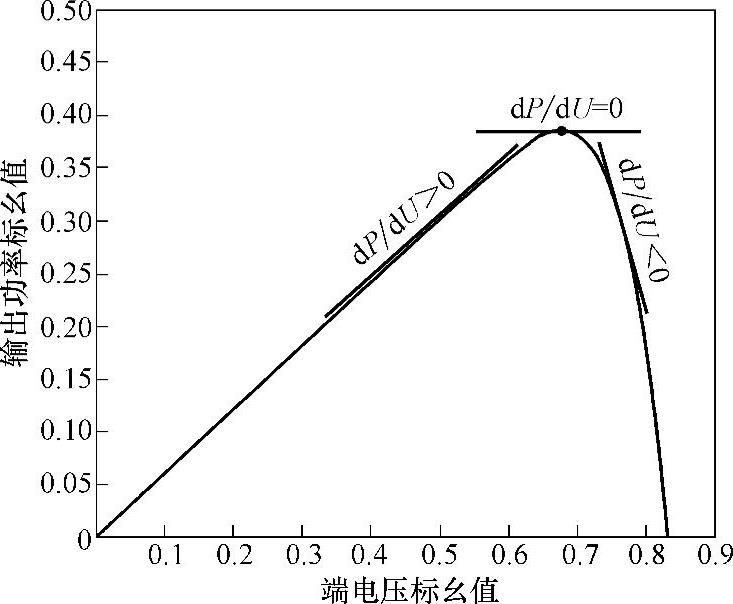
图6-18 光伏电池P-U特性的dP/dU变化特征
电导增量法[3](incremental conductance,INC)从光伏电池输出功率随输出电压变化率而变化的规律出发,推导出系统工作点位于最大功率点时的电导和电导变化率之间的关系,进而提出相应的MPPT算法。
图6-18给出了光伏电池P-U特性曲线及dP/dU变化特征,即在光强一定的情况下仅存在一个最大功率点,且在最大功率点两边dP/dU符号相异,而在最大功率点处dP/dU=0。
显然,通过对dP/dU的定量分析,可以得到相应的最大功率点判据。考虑光伏电池的瞬时输出功率为
P=IU (6-15)
将式(6-15)两边对光伏电池的输出电压U求导,则

当dP/dU=0时,光伏电池的输出功率达到最大。则可以推导出工作点位于最大功率点时需满足以下关系:
 (https://www.xing528.com)
(https://www.xing528.com)
实际中以ΔI/ΔU近似代替dI/dU,则使用电导增量法(INC)进行最大功率点跟踪时判据如下:
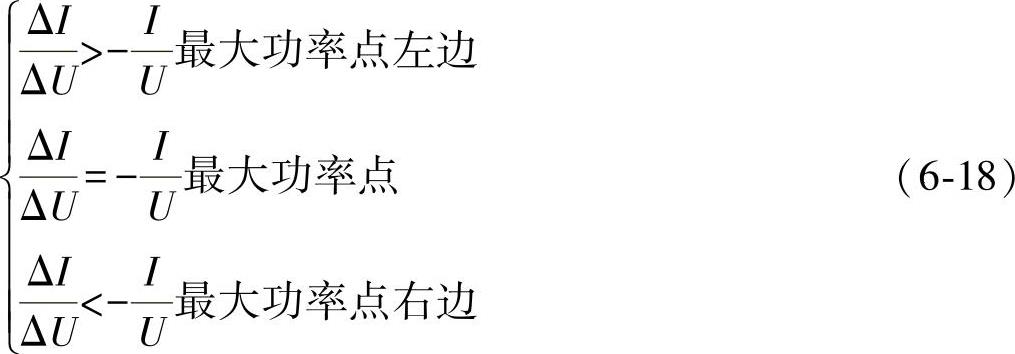
图6-19为定步长电导增量法流程图。其中ΔU∗为每次系统调整工作点时固定的电压改变量(步长),Uref为下一工作点电压。从图中可以看出计算出ΔU之后,对其是否为零进行判定,使流程图出现两条分支,其中,左分支与上述分析相吻合;而右分支则主要是为抑制当外部辐照度发生突变时的误判而设置的。
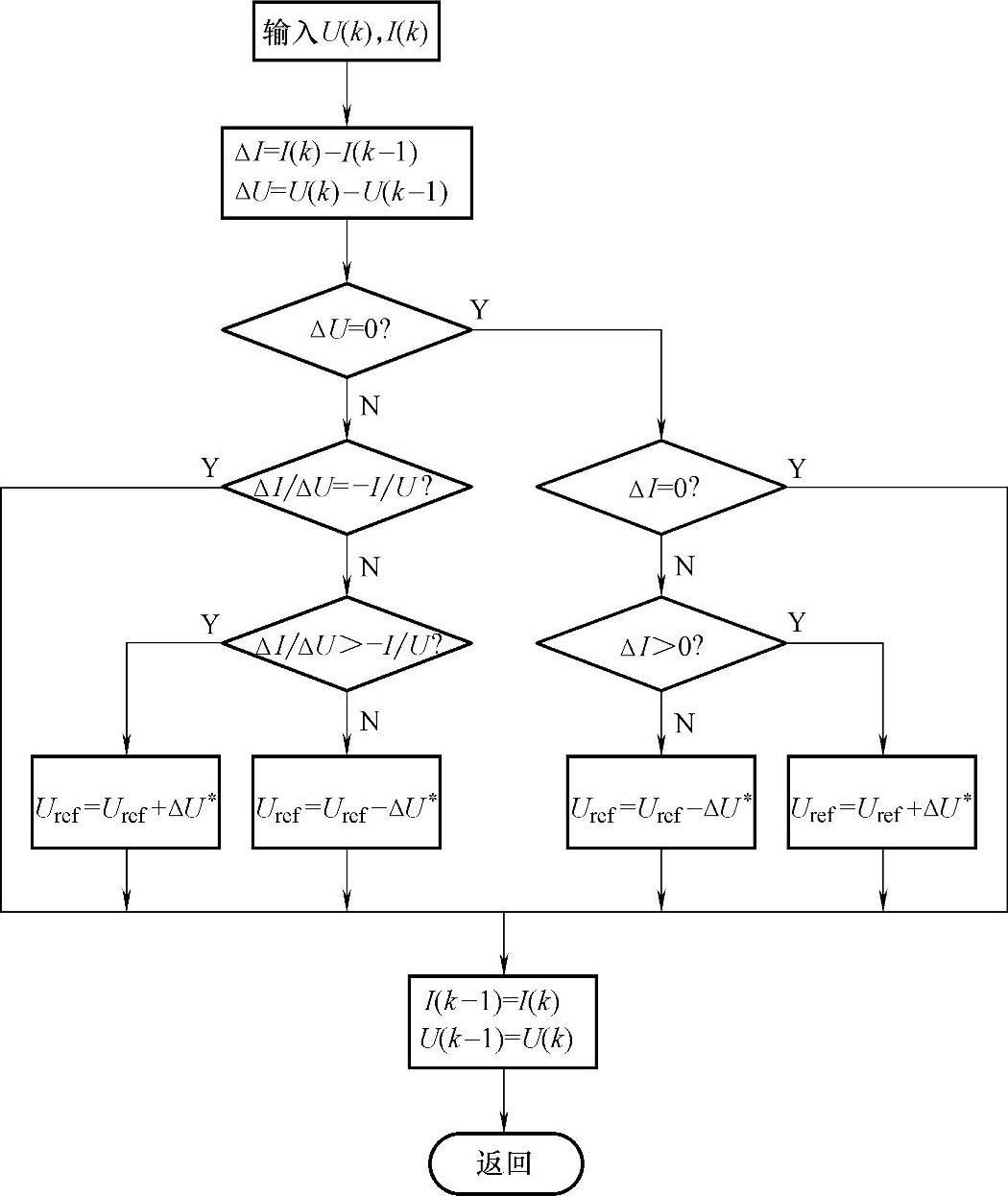
图6-19 电导增量法流程图
从本质上说,电导增量法和扰动观测法都是求出工作点电压变化前后的功率差,找出满足ΔP/ΔU=0的工作点,两者的主要区别在于功率差的计算方式。
扰动观测法将dP用功率差ΔP=Pk-Pk-1进行近似;而电导增量法则是将dP用全微分ΔP=UΔI+IΔU进行近似,其中ΔU=Uk-Uk-1,ΔI=Ik-Ik-1。
在最大功率点跟踪过程中,电导增量法在dP/dU=0(或者dI/dU=-I/U)时,方能使光伏电池输出最大功率。然而,由于采样与控制精度的限制,实际应用中可以将dP/dU=0条件改造为dP/dU<ε,其中ε是在满足最大功率跟踪一定精度范围内的阈值,由具体的要求决定[3]。
采用电导增量法的主要优点是MPPT的控制稳定度高,当外部环境参数变化时,系统能平稳地追踪其变化,且与光伏电池的特性及参数无关。然而,电导增量法对控制系统的要求则相对较高,另外,电压初始化参数对系统启动过程中的跟踪性能有较大影响,若设置不当则可能产生较大的功率损失。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。