



扰动观测法由于简单易行而被广泛运用于MPPT控制中,但随着研究的深入,该方法存在的不足之处逐渐显现出来,即存在振荡和误判的问题。
对于实际光伏系统的MPPT控制,由于检测与控制精度的限制,对工作点电压进行扰动的最小步长是一定的,所以对于定步长的扰动观测法来说,振荡问题无法避免。显然,扰动步长越小,振荡幅度越小。然而要使系统快速达到最大功率点附近,往往不能使用最小步长进行MPPT控制,这就要求实际的MPPT控制需要在MPPT速度和精度之间折中考虑。
当工作点到达最大功率点附近时,对于定步长扰动方式,会出现工作点跨过最大功率点的情形,但改变扰动方向后,工作点电压与最大功率点电压的差值还是小于步长,无法到达最大功率点。这种由于扰动步长一定所导致的工作点在最大功率点两侧往复运动的情形,即扰动观测法的振荡现象。
当外界环境发生变化时,光伏电池的输出功率特性曲线也发生改变。会出现一段时间内工作点序列位于不同的P-U特性曲线上的情形。此时,对于不同的P-U特性曲线上的工作点继续使用针对于固定特性曲线的判据,就会出现扰动方向与实际功率变化趋势相反的情形,这就是扰动观测法的误判现象。
以下分别讨论扰动观测法的振荡和误判问题。
6.3.2.1 扰动观测法的振荡分析
由上述分析可知,使用定步长的扰动观测法,会出现工作点在最大功率点两侧做往复运动的情形。下面对这种情形进行详细分析。
假设当前工作点电压U1位于最大功率点左侧,并与最大功率点对应电压值Umpp的差值小于等于一个步长。根据扰动观测法的基本寻优规则,系统应增大工作点电压值,即下一步的工作点电压值U2=U1+ΔU。此时将会出现两种情形:第一种情形是电压扰动后系统的工作点将位于最大功率点Pmpp右侧的P2点;第二种情形是电压扰动后系统正好工作于最大功率点Pmpp处。
下面详细分析上述两种情形时振荡产生的过程。
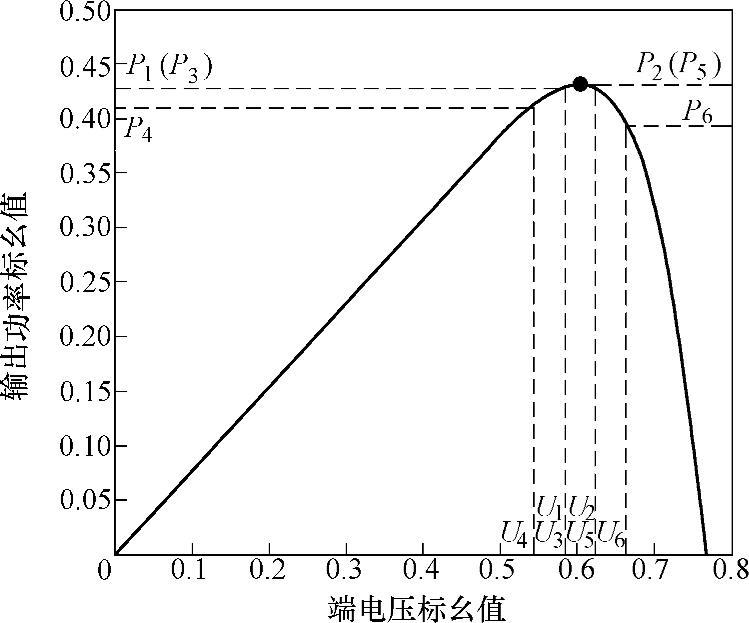
第一种情形:调整后系统的工作点将位于最大功率点Pmpp右侧的P2(U2)点,如图6-8所示,此时将存在以下3种可能:
1)若P2<P1,则系统应改变扰动方向,减小工作点电压值,即U3=U2-ΔU,因此调整后工作点将位于P3点上,当辐照度、温度等环境条件不变时,P3点应与P1点重合。由于P2<P3,因此,系统还将继续减小工作点电压值,即U4=U3-ΔU,这样系统的工作点将向远离最大功率点的方向调整,而使工作点位于最大功率点左侧的P4(U4)点上。此时,由于P4<P3,系统才将改变扰动方向,使工作点向最大功率点靠近,重新回到P1点。由于P1>P4,系统继续之前的扰动方向,开始新一轮的振荡过程。这样,光伏电池的输出功率会在最大功率点附近以P2-P3(P1)-P4三点方式振荡,并导致功率损失。
2)若P2>P1,则系统将继续增大工作点电压值,即U6=U2+ΔU,这样系统的工作点将向远离最大功率点的方向调整,而使工作点位于最大功率点右侧的P6(U6)点上。此时,由于P6<P2,系统才将改变扰动方向,使工作点向最大功率点靠近,调整后系统的工作点将位于P5点上,当辐照度、温度等环境条件不变时,P5点应与P2点重合。由于P5>P6,因此,系统继续减小工作点电压值,回到P1点。由于P1<P5,系统改变扰动方向,开始新一轮的振荡过程。这样,光伏电池的输出功率会在最大功率点附近以P1-P2(P5)-P6三点方式振荡,并导致功率损失。
3)若P2=P1,这种情形将导致工作点在P1和P2两点之间跳变,即以P1-P2两点方式振荡,并导致功率损失。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-8 扰动观测法电压扰动的第一种情况示意图
第二种情况:调整后系统的工作点正好是最大功率点Pmpp,其电压扰动及三点振荡的过程如图6-9所示。
因为Pmpp>P1,系统将增大工作点电压值,即U3=U2+ΔU,而使工作点位于最大功率点右侧的P3(U3)点上。此时,由于P3<Pmpp,系统才将改变扰动方向,使工作点向最大功率点靠近。即当U2恰好为最大功率点对应电压值时,系统将在P1-Pmpp-P3之间循环振荡,并导致功率损失。
以上分析表明:基于扰动观测法的MPPT控制策略一定存在最大功率点附近的振荡,振荡的基本形式有两点振荡和三点振荡,产生振荡的根本原因是电压扰动的不连续(即有一定的步长)所导致的,振荡的后果将产生能量的损失。
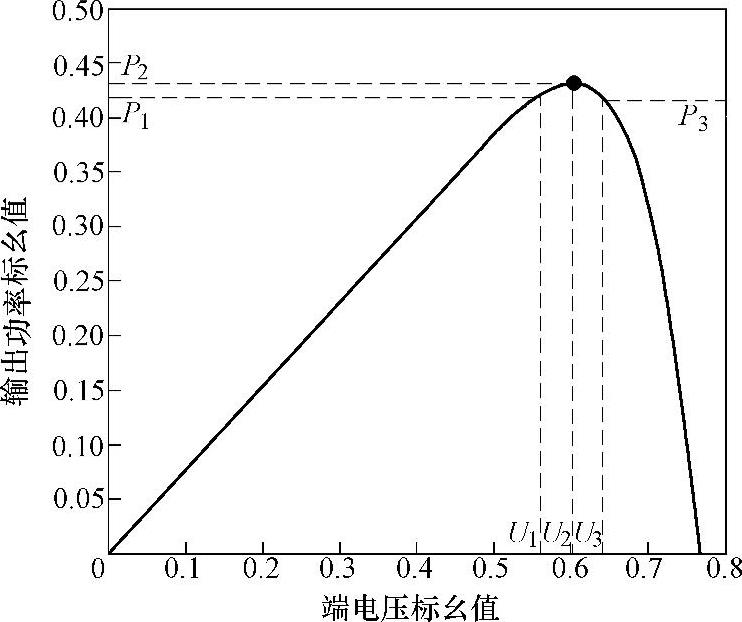
图6-9 扰动观测法电压扰动第二种情况示意图
6.3.2.2 扰动观测法的误判分析
以上讨论了外部环境不变时扰动观测法的振荡问题。实际上,光伏电池的外部环境因素是不断变化的,特别是一天中的辐照度是时刻变化的(如早、晚和有云的天气),因此对于光伏电池来说,其P-U特性曲线也是不断变化的,即P-U特性具有时变性,如图6-10所示。当辐照度发生一定幅度的突变时,如果按照上述定步长的扰动观测法进行MPPT控制时,就有可能发生误判,具体分析如下:
如图6-10所示,假设光伏系统工作在最大功率点左侧时,此时工作电压记为Ua,光伏电池输出功率记为Pa,当电压向右扰至Ub时:如果辐照度不变,光伏电池的输出功率满足Pb>Pa,扰动观测法工作正确;如果辐照度变小,则对应Ub的输出功率有可能满足Pc<Pa,此时,扰动观测法会误判电压扰动方向,从而使工作点左移回到Ua点;如果辐照度持续变小,则有可能出现控制系统不断误判,使工作点不断左移。对于光伏并网系统来说,工作点不断左移,一方面会使得并网功率下降,另一方面会由于直流侧电压的下降而使得并网电流波形失控,直至停止工作。
扰动观测法的误判情形是由辐照度等外部环境因素剧烈变化所导致的,因此可以将误判看作动态的MPPT振荡问题。
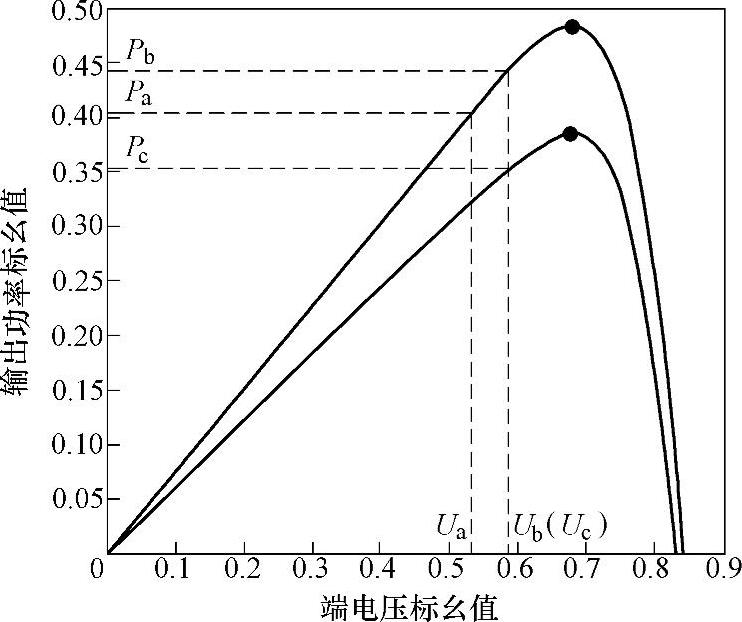
图6-10 扰动观测法可能发生误判的示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。