



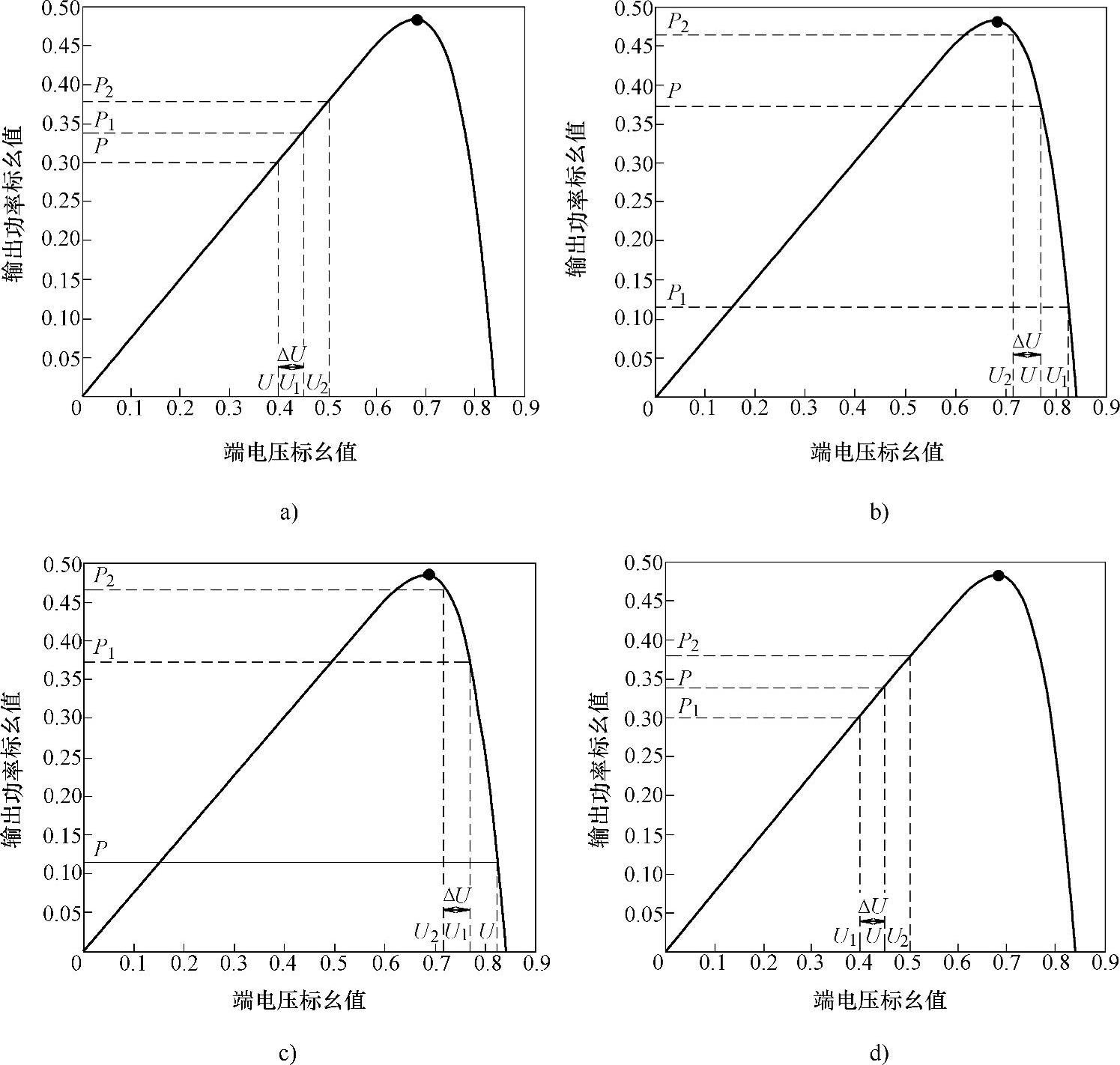
图6-6 扰动观测法MPPT过程示意
a)增大电压后需继续采用增大电压扰动的过程 b)增大电压后需采用减小电压扰动的过程 c)减小电压后需继续采用减小电压扰动的过程 d)减小电压后需采用增大电压扰动的过程
众所周知,一般正常条件下,光伏电池P-U特性曲线是一个以最大功率点为极值的单峰值函数,这一特点为采用扰动观测法来寻找最大功率点提供了条件,而扰动观测法实际上采用了步进搜索的思路,即从起始状态开始,每次对输入信号做一有限变化,然后测量由于输入信号变化引起输出变化的大小及方向,待方向辨别后,再控制被控对象的输入按需要的方向调节,从而实现自寻最优控制。将步进搜索应用于光伏系统的MPPT控制时,就是所称的扰动观测法。如图6-6所示,当负载特性与光伏电池特性的交点在最大功率点左侧时,MPPT控制会使交点处的电压升高;而当交点在最大功率点右侧时,MPPT控制会使交点处的电压下降,如果持续这样的搜索过程,最终可使系统跟踪光伏电池的最大功率点运行。即使用ΔP/ΔU代替dP/dU,期望得出的工作点满足ΔP/ΔU≈0,即为最大功率点。
为讨论方便,假定辐照度、温度等环境条件不变,并设U1、I1为第一次光伏电池的电压、电流调整值,P1为对应的输出功率,U、I为当前光伏电池的电压、电流检测值,P为对应的输出功率,ΔU为电压调整步长,ΔP=P1-P为电压调整前后的输出功率差。图6-6显示了扰动观测法的MPPT过程,具体描述如下:
1)当增大参考电压U(U1=U+ΔU)时,若P1>P,表明当前工作点位于最大功率点的左侧,此时系统应保持增大参考电压的扰动方式,即U2=U+ΔU,其中U2为第二次调整后的电压值,如图6-6a所示。
2)当增大参考电压U(U1=U+ΔU)时,若P1<P时,表明当前工作点位于最大功率点的右侧,此时系统应采用减小参考电压的扰动方式,即U2=U-ΔU,如图6-6b所示。(https://www.xing528.com)
3)当减小参考电压U(U1=U-ΔU)时,若P1>P时,表明工作点位于最大功率点的右侧,系统应保持减小参考电压的扰动方式,即U2=U-ΔU,如图6-6c所示。
4)当减小参考电压U(U1=U-ΔU)时,若P1<P时,表明工作点位于最大功率点的左侧,此时系统应采用增大参考电压的扰动方式,即U2=U+ΔU,如图6-6d所示。
可见,扰动观测法就是按照以图6-6所示的过程反复进行输出电压扰动,并使其电压的变化不断使光伏电池输出功率朝大的方向改变,直到工作点接近最大功率点。扰动观测法按每次扰动的电压变化量是否固定,可以分为定步长扰动观测法和变步长扰动观测法两类,定步长扰动观测法的流程图如图6-7所示。
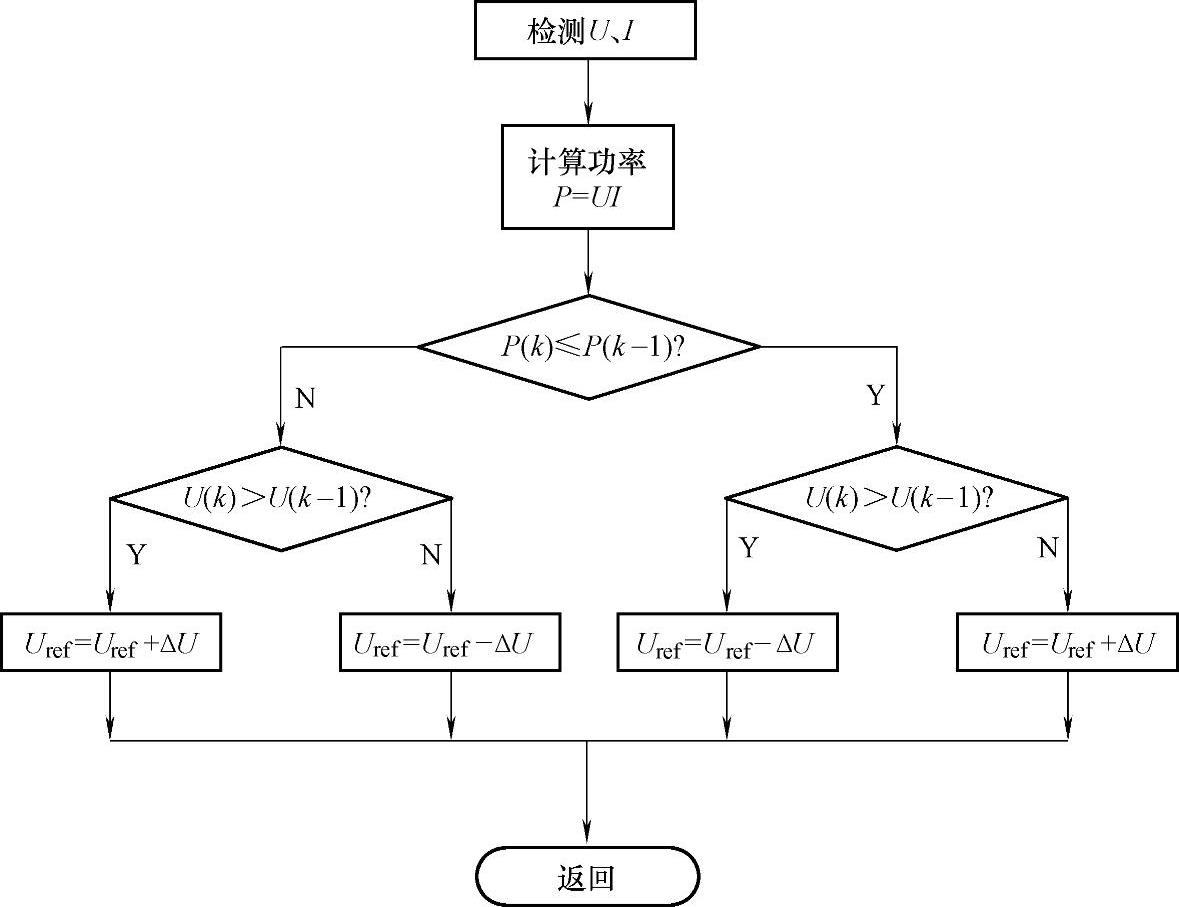
图6-7 定步长扰动观测法的流程图
以上分析可知,扰动观测法具有控制概念清晰、简单、被测参数少等优点,因此被普遍地应用于实际光伏系统的MPPT控制。值得注意的是,在扰动观测法中,电压初始值及扰动电压步长对跟踪精度和速度有较大影响。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。