



1.基于PI、P调节器的双环控制策略
在中小功率单相并网逆变器中,其输出LCL滤波器的电容一般较小,因此可以考虑采用较为简单的双环控制策略,其系统及控制结构如图5-58所示。
图5-58中,并网逆变器的直流电压外环采用PI调节器,通过稳定直流侧电压实现逆变器输入、输出能量的平衡;电流内环的电流幅值参考值Im∗由直流电压外环调节器的输出给定,通过检测获得电网电压相位角θ,并由cosθ、Im∗的乘积获得瞬时输出电流的参考信号iL∗1,电流内环一般可采用简单的P调节器,以实现电流的快速控制;为了抑制电网电压扰动,采用了电网电压前馈控制,电流环的输出与电网电压的前馈信号叠加后经过SPWM调制后输出驱动开关管,以实现单相逆变器的并网控制。
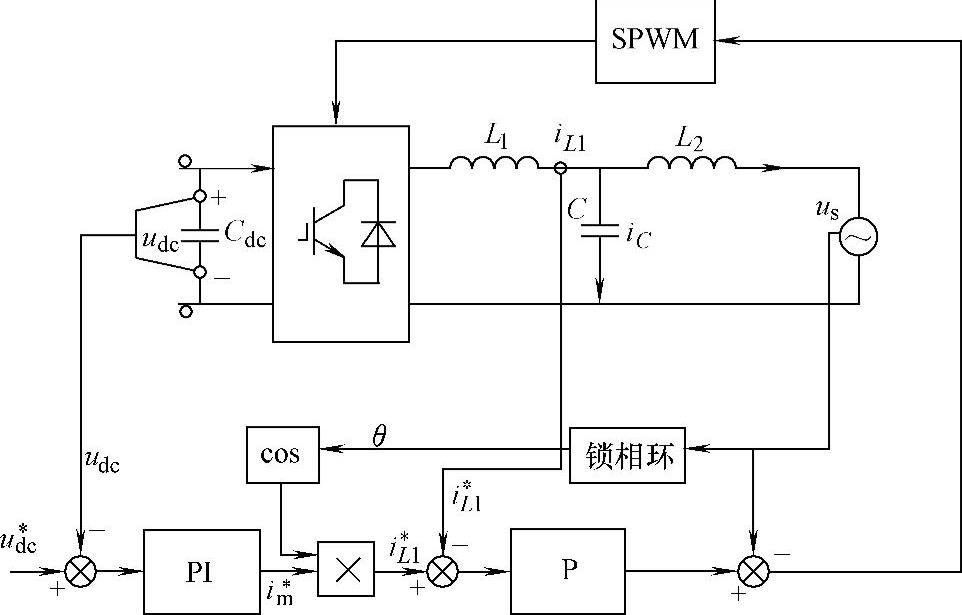
图5-58 基于PI、P调节器的单相并网逆变器的双环控制系统结构
2.采样基于比例谐振(PR)调节器的单相并网逆变器的多环控制
上述基于PI、P调节器的单相并网逆变器的双环控制虽然控制简单,但存在以下不足:
1)电流环无法实现电流的无静差控制;
2)当输出滤波器的电容较大时系统可能发生振荡;
3)由于没有直接控制网侧电流,因此会降低网侧电流品质。
为克服上述不足,可以采用基于比例谐振(PR)调节器的单相并网逆变器的多环控制策略。采用基于PR调节器的单相并网逆变器的多环控制结构如图5-59所示。

图5-59 采用PR调节器的单相并网逆变器控制结构
图5-59中,直流电压外环仍采用PI调节器控制,以稳定直流侧电压;电网电流环的电流幅值参考值Im∗由直流电压外环调节器的输出给定,通过检测获得电网电压相位角θ,并由cosθ、Im∗的乘积获得瞬时电网电流的参考信号iL∗2,为实现电网电流的无静差控制,电网电流环可采用比例谐振调节器(PR)。为抑制LCL滤波器的振荡,图5-59中采用了电容电压微分即电容电流反馈控制,从而有效地增加了系统阻尼,电容电流内环采用P调节器控制,以保证内环控制的快速性;内环调节器的输出经过SPWM调制后驱动开关管,以实现单相逆变器的并网控制。
以下简单讨论比例谐振调节器(PR)的基本问题:
在静止坐标系中,若要实现正弦参考信号的无静差控制,根据内模定理,则要求在系统开环传递函数中包含正弦信号的s域模型,由于正弦信号可以是cos和sin两种形式表示,因此,正弦信号相应的s域模型可由以下两种无阻尼谐振的传递函数形式,即
 (https://www.xing528.com)
(https://www.xing528.com)
为了比较两种传递函数特性,分别作出相应的博德图,如图5-60所示。
由图5-60不难看出:G1(s)和G2(s)在ω0附近都具有无穷大的开环增益,因此可实现频率为ω0的正弦信号的无静差控制。然而:G1(s)的相角变化范围为90°~-90°,而G2(s)的相角变化范围为:0°~-180°,可见,从稳定性的角度来看,G1(s)的形式对系统稳定更有利,而G2(s)可能使系统的相角裕度不足,从而引起系统的振荡。
上述分析表明:为实现对正弦信号的无静差控制,可以采用传递函数为 形式的调节器设计,其博德图如图5-61所示。
形式的调节器设计,其博德图如图5-61所示。
另外,为了使调节器增加一个可控的自由度,以使得系统的闭环极点位置可以在根轨迹上自由配置,可在上述G1(s)中增加一个可调的比例系数,则调节器的传递函数变为 ,相应的G1(s)博德图如图5-62所示。
,相应的G1(s)博德图如图5-62所示。
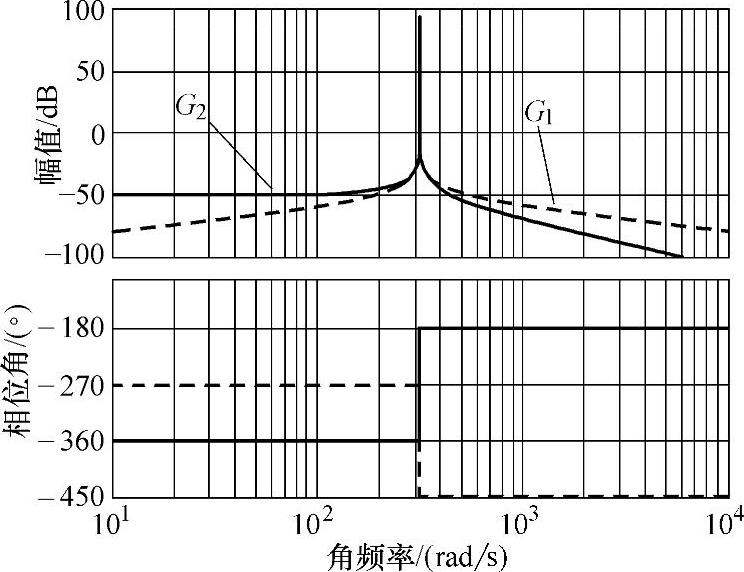
图5-60 G1(s)与G2(s)博德图比较
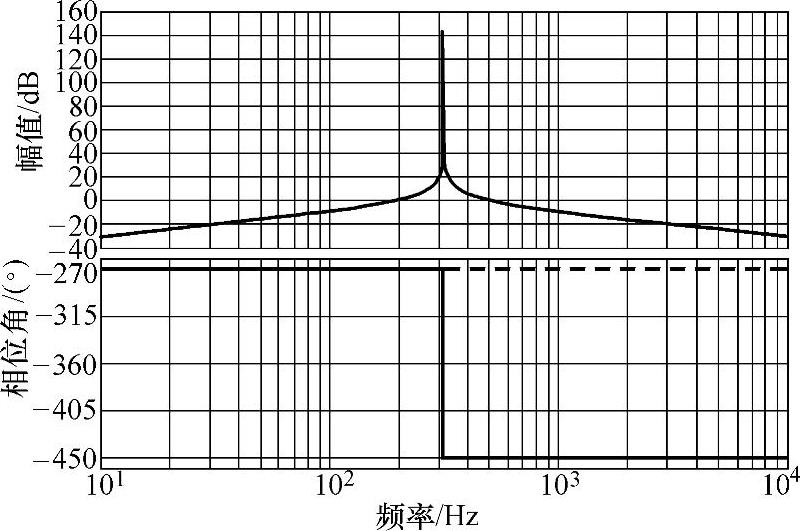
图5-61 调节器采用G1(s)形式的博德图

图5-62 G1(s)、Gc(s)博德图
从图5-62可以看出:当调节器采用 的形式后,虽然系统在ω0附近具有无穷大的开环增益,但在其他频率处,其增益呈衰减趋势。因而,为了补偿原有的增益呈衰减趋势,提高系统的动态性能,需要相应增大ω0外频率处的开环增益,为此在原有传递函数基础上,引入比例项,即引入比例项的调节器传递函数为
的形式后,虽然系统在ω0附近具有无穷大的开环增益,但在其他频率处,其增益呈衰减趋势。因而,为了补偿原有的增益呈衰减趋势,提高系统的动态性能,需要相应增大ω0外频率处的开环增益,为此在原有传递函数基础上,引入比例项,即引入比例项的调节器传递函数为

Gc(s)的博德图如图5-62所示,与其中G1(s)的博德图相比,Gc(s)的博德图在高频段对系统有较大的增益补偿,从而提高了系统截止频率,加快了系统的响应速度。
由于 中既含有比例项,又含有谐振项,因此Gc(s)形式的调节器结构被称为比例谐振调节器或称PR调节器。
中既含有比例项,又含有谐振项,因此Gc(s)形式的调节器结构被称为比例谐振调节器或称PR调节器。
需要注意的是:因为比例谐振调节器是使系统在特定频率ω0处获得无穷大的开环增益,因而其仅能无静差跟随给定信号频率ω0时的正弦量,对于给定信号频率是变化量的场合是不适用的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。