



基于电压定向的直接功率控制(V-DPC)具有高功率因数、低THD、算法及结构简单的特点,但是对于电网电压存在谐波、畸变和不平衡等情况时,会影响电压定向准确度,致使DPC控制性能下降,甚至导致系统振荡。为克服电网电压对DPC控制性能的影响,波兰学者Mariusz Malinowski提出了基于虚拟磁链定向的直接功率控制策略(VF-DPC)[6]。
VF-DPC控制可以分为基于滞环比较的不固定开关频率和基于空间矢量调制的(SVM)固定开关频率两种控制策略。同样,两种控制策略均可采用无电网电压传感器的控制策略,具体讨论如下。
5.3.3.1 基于滞环比较控制的不定频VF-DPC控制[4,6,10,11]
1.基于虚拟磁链定向的瞬时功率估算
观测式(5-42)、式(5-43)所描述的基于电网电压定向的无电网电压传感器时的瞬时功率估算公式,不难看出,功率估算公式中的前半部分具有微分项的运算表示电感中的储存能量,而后半部分具有开关函数项的运算则表示直流侧的输入能量,并由此存在以下问题:
1)为克服微分噪声,估算器运算中需要较为平滑的电流波形,由此需要足够大的滤波电感和足够高的采样频率设计。
2)由于瞬时功率估算与开关状态有关,因此对功率和电压的估算应尽量避免开关时刻,否则会带来较大的估算误差。
然而,采用基于虚拟磁链定向的瞬时功率估算可以避免上述问题的产生,分析如下:
图5-22为基于虚拟磁链定向的并网逆变器的矢量图,根据虚拟磁链的定义Ψ=∫Edt可得Ψ在αβ坐标系下的表达式为
则并网逆变器交流侧电压方程可以表示为

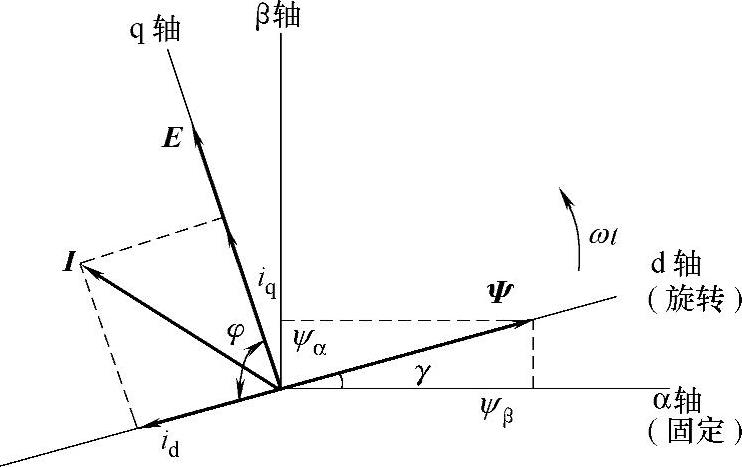
图5-22 基于虚拟磁链定向的并网逆变器的矢量图
E—电网电压矢量 I—输出电流矢量
实际中如果忽略R,则式(5-62)可化简为

设电网电压矢量在αβ坐标系下的表达式为Eβα=(eβ,eα)T,则根据虚拟磁链定义可得

再由Xβα=T(θ)Xqd,则式(5-64)可变换dq坐标系下的关系式,即

其中,矢量Eqd=(eq,ed)T;Ψqd=(ψq,ψd)T。
考虑到 ,并将其代入(5-65)整理可得
,并将其代入(5-65)整理可得
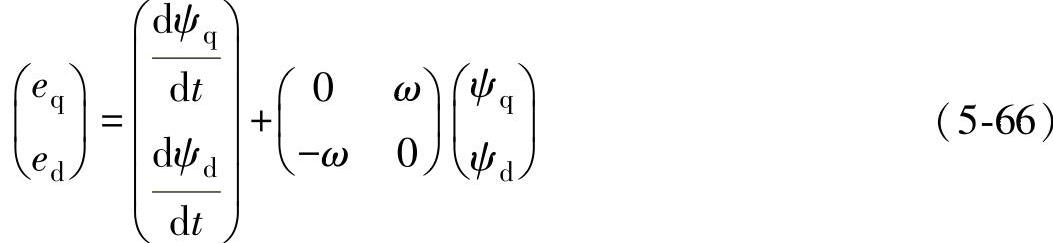
式中 ω——同步旋转dq坐标系的旋转角频率即电网基波角频率。
如图5-23所示,在dq坐标系中,当虚拟磁链以d轴定向时,若假定并网逆变器运行于单位功率因数时,则有:ψd=∣Ψ∣=Ψm,ψq=0。此时,式(5-66)可化简为
代入同步坐标系下的瞬时功率表达式(5-36)和式(5-37)可得

对于三相平衡系统,有Ed=dψd/dt=0,则式(5-68)可化简为

然而,为了避免到旋转坐标系的坐标变换,DPC控制策略中的瞬时功率估算通常在两相静止αβ坐标系下进行,将电网电压矢量E的表达式改写成

式中 Ψm——虚拟磁链矢量Ψ的幅值。
由式(5-69)可得电网电压矢量E在αβ坐标系下的表达式为

再利用复功率矢量S=EI∗的关系,则有

则有
对于三相平衡系统,由于磁链幅值的变化率为零,即dΨm/dt=0,则式(5-73)所示的瞬时功率表达式可简化为(https://www.xing528.com)

2.基于无电网电压传感器VF-DPC的控制结构
基于无电网电压传感器VF-DPC的控制结构如图5-23所示。
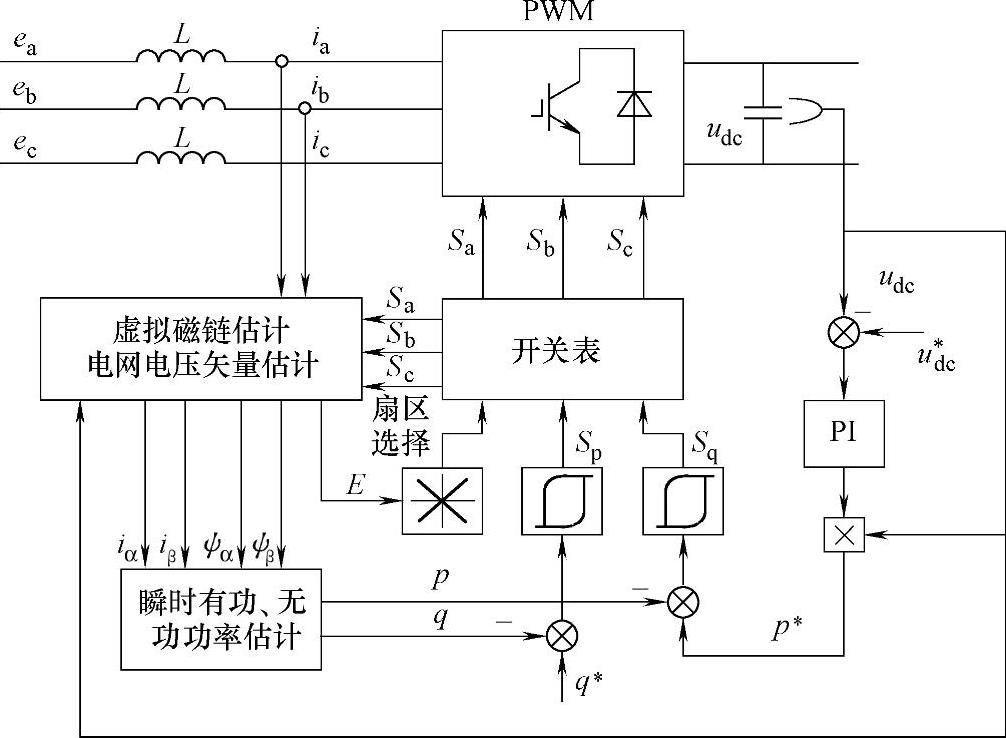
图5-23 基于无电网电压传感器VF-DPC的控制结构
显然,与图5-18的V-DPC控制类似,只是图5-23中的VF-DPC控制采用了基于虚拟磁链定向的瞬时功率估计方案。以下就图5-23中几个关键环节阐述如下:
(1)虚拟磁链的估算
在αβ坐标系中,虚拟磁链Ψαβ的α、β轴分量可表示为
式中 uα、uβ——并网逆变器输出电压矢量α、β轴的分量。
显然,uα、uβ可由并网逆变器的直流侧电压udc和相应开关函数Sa、Sb、Sc调制而成,即
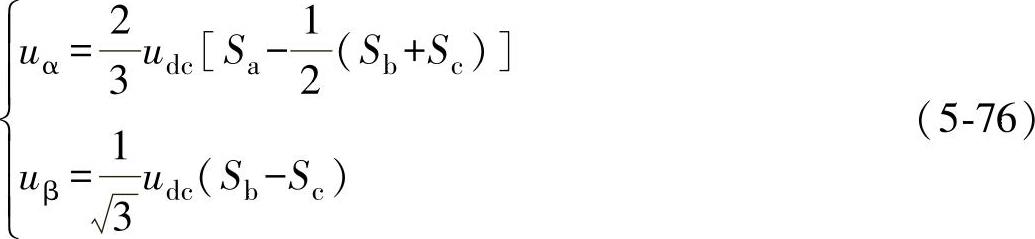
将式(5-76)代入式(5-75)即可求得并网逆变器虚拟磁链Ψαβ的α、β轴分量。虽然uα、uβ与逆变器的开关状态有关,且式(5-75)中含有微分项,但是磁链的电压积分特性则相当是一个低通滤波器,可以有效抑制电压谐波以及电流纹波对磁链观测的影响。因此采用虚拟磁链的矢量定向比采用电网电压的矢量定向具有更高的定向准确性。
(2)瞬态功率估算与功率控制
将检测得到的输出电流ia、ib和估算出的虚拟磁链ψα、ψβ输入瞬态功率估算单元,并由式(5-74)对并网逆变器的输出瞬时有功和无功功率进行估算。直流侧电压外环的PI调节器输出作为瞬时有功功率的参考值p∗,而瞬时无功功率的参考值q∗则根据是否需要无功补偿而直接给定,例如要实现单位功率因数控制时,则设定q∗=0即可。
(3)滞环控制器
将瞬时有功、无功参考值p∗、q∗与瞬时有功、无功功率的估算值进行比较,其偏差送入滞环控制器,滞环控制器的输出结果为
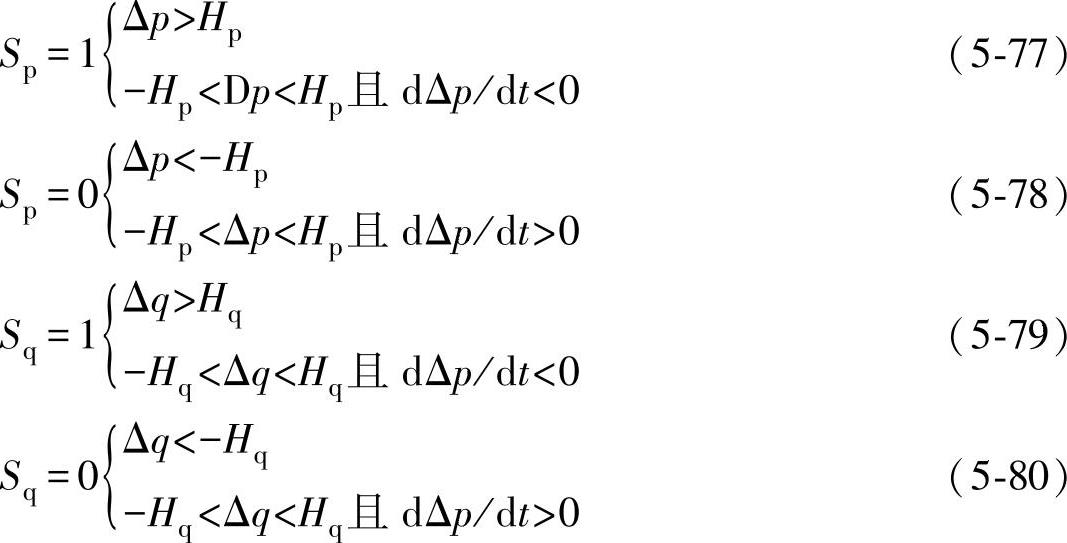
其中,Hq和Hp是滞环宽度,并且Δq=q∗-q;Δp=p∗-p。
(4)VF-DPC开关状态表
与V-DPC开关状态表类似,磁链的位置区间被划分为12个区间,相邻的两个开关矢量之间被平均分成两个区间,若以区间A表示其中靠近矢量VA的区间,而区间B表示靠近矢量VB的区间。其中:VA、VB表示相邻的两个开关矢量,且当VA=V2时,VB=V1;当VA=V1时,VB=V6;以此类推。
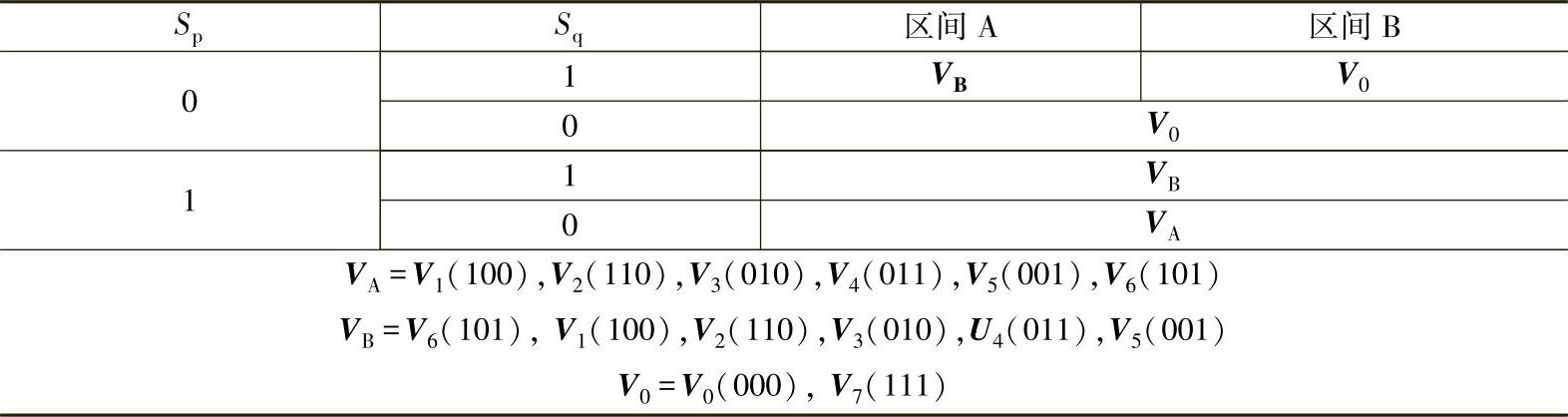
由滞环比较器输出结果Sp、Sq,以及磁链矢量位置γ=arctan(ψα/ψβ)所确定的所处区间信息,通过查表5-2即可获得所需的桥臂输出电压矢量对应的开关状态。
表5-2 VF-DPC开关表
基于滞环控制的VF-DPC具有以下一些优点:
1)简单和无噪声、鲁棒性好的瞬时功率估算;
2)与传统DPC相比可以采用较低的采样频率;
3)无电流控制环;
4)高动态性能解耦的有功、无功控制。
然而,滞环VF-DPC主要的不足在于:逆变器的开关频率不固定,并且一般需要高速的处理器和A/D采样转换器。
5.3.3.2 基于PI调节的定频VF-DPC控制[9,12-15]
滞环控制的显著缺点是开关频率的不固定,这给输出滤波器的设计带来了问题。为此可基于PI调节的固定开关频率VF-DPC控制策略。该定频VF-DPC控制策略具有开关频率固定、算法简单、动态响应好等优点,尤其是在电网电压不理想的情况下也能实现较好的并网控制性能。其控制系统结构如图5-24所示。
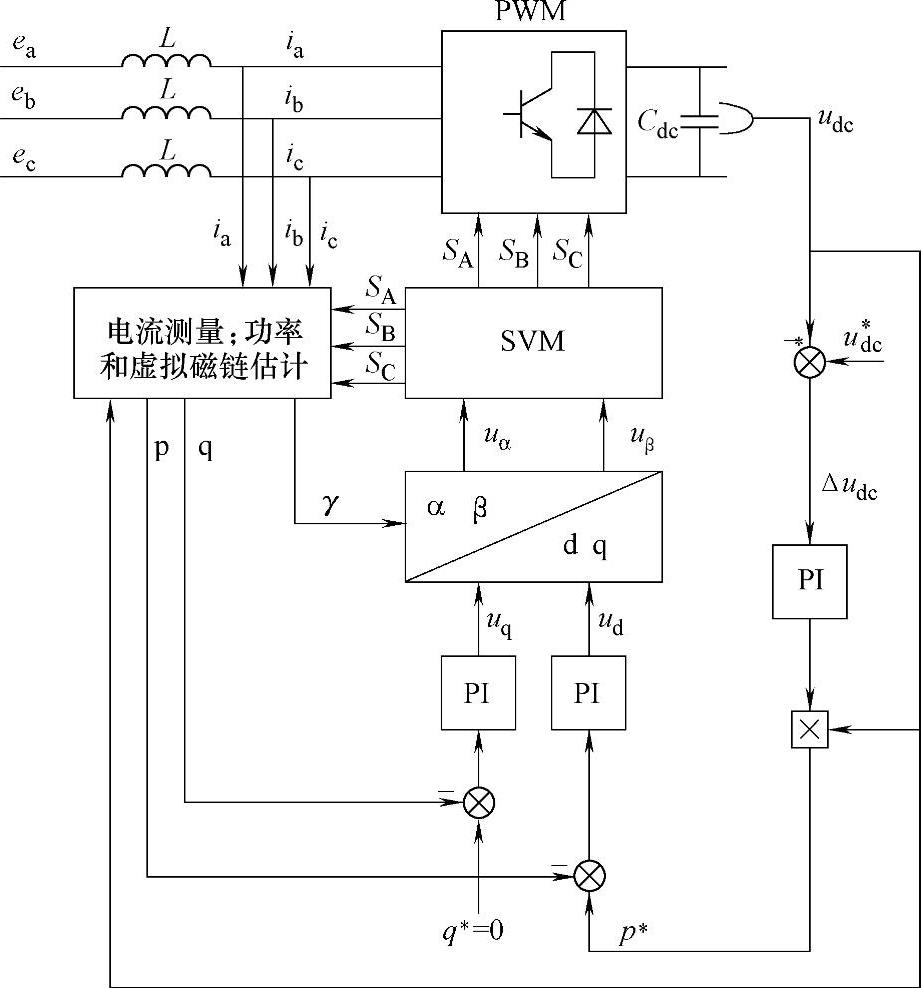
图5-24 基于PI调节的定频VF-DPC控制系统结构
由图5-24可以看出,控制系统中其功率控制器由PI调节器取代了原来的滞环控制器,即瞬时有功、无功功率的误差信号Δp、Δq被引入PI调节器,通过PI调节从而产生并网逆变器交流输出电压在同步坐标系下的分量值ud和uq,再通过坐标变换得到两相静止αβ坐标系下的分量值uα和uβ:

其中,
由uα和uβ以及矢量位置角γ,便可以采用固定开关频率调制的空间矢量PWM算法获得相应的开关控制信号,以实现并网逆变器的定频VF-DPC控制。
可见基于PI调节的定频VF-DPC控制策略与相应的滞环控制策略的主要区别在于各自对功率比较误差信号处理的不同。这种基于PI调节的定频VF-DPC控制,其开关频率固定,滤波器设计容易,但DPC控制的快速性相比于滞环控制有所降低。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。