



5.2.3.1 虚拟磁链的定向及VFOC
基于虚拟磁链定向的矢量控制(VFOC)是在基于电网电压定向的矢量控制(VOC)基础上发展出来的,是对VOC方案的一种改进。VOC方案的问题在于:当电网电压含有谐波等干扰时,就会直接影响电网电压基波矢量相角的检测,从而影响VOC方案的矢量定向的准确性及控制性能,甚至使控制系统振荡。为抑制电网电压对矢量定向及控制性能的影响,应当寻求能克服电网电压谐波影响的定向方法,即可考虑采用基于虚拟磁链定向的矢量控制(VFOC)。
虚拟磁链定向的基本出发点是将并网逆变器的交流侧(包括滤波环节和电网)等效成一个虚拟的交流电动机,如图5-10所示。其中,Rs、L可分别看作是该交流电动机的定子电阻和定子漏感,三相电网电压矢量E经过积分后所得的矢量Ψ=∫Edt便可认为是该虚拟交流电动机的气隙磁链Ψ。显然,由于积分的低通滤波特性,因此可以有效克服电网电压谐波对磁链Ψ的影响,从而确保了矢量定向的准确性。基于虚拟磁链定向的矢量控制(VFOC)的矢量图如图5-11所示,令磁链矢量Ψ与同步旋转坐标系的d轴重合,由于虚拟磁链矢量Ψ比电网电压矢量E滞后90°,因而当采用VFOC方案时,若控制并网逆变器运行于单位功率因数状态时,需满足:ed=0、eq=∣E∣,这样并网逆变器的输出瞬时功率即为

可见,通过控制与磁链矢量Ψ相重合的d轴电流分量id即可控制并网逆变器输出的无功功率,而控制与磁链矢量Ψ相垂直的q轴电流分量iq即可控制并网逆变器输出的有功功率。显然,这与VOC方案中的d、q轴电流分量的有功、无功定义正好相反。
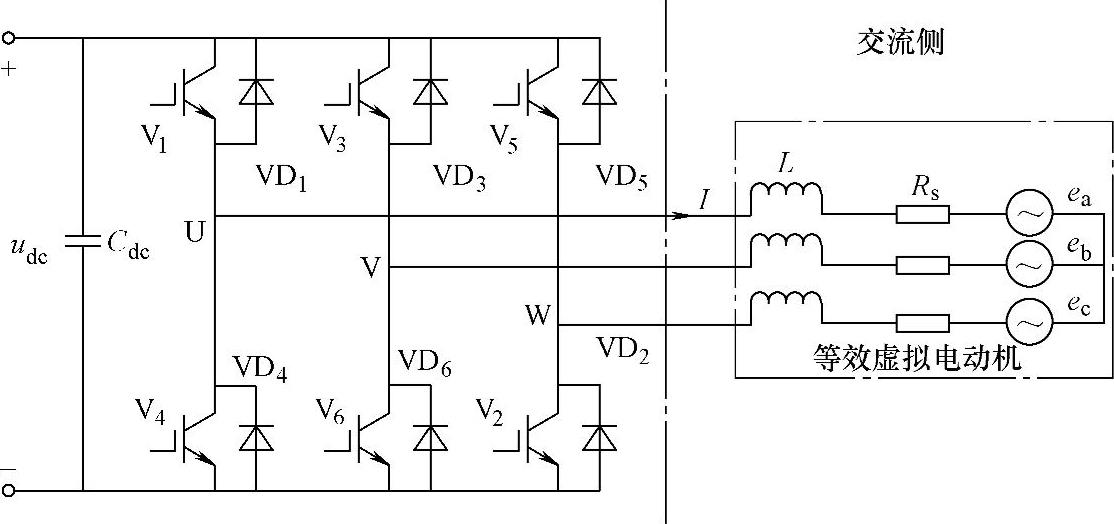
图5-10 交流侧等效虚拟电动机
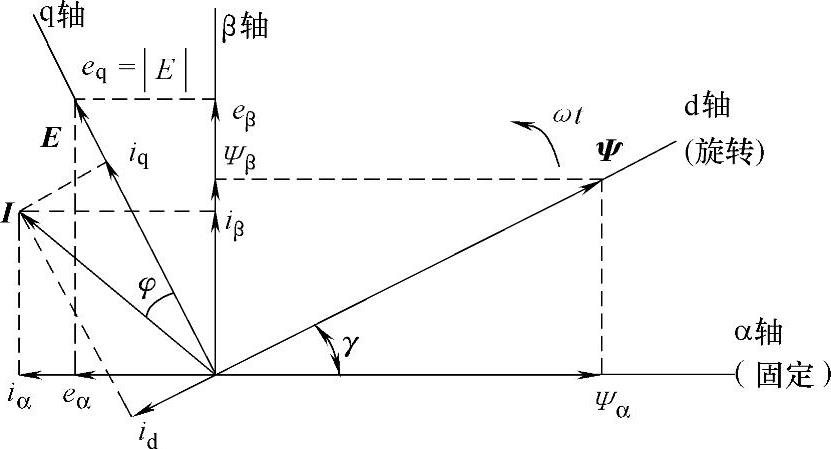
图5-11 基于虚拟磁链定向的矢量控制(VFOC)的矢量图
基于虚拟磁链定向的矢量控制(VFOC)的结构如图5-12所示,由于VFOC方案和VOC方案的被控对象没有改变,仅是定向矢量和dq轴变量性质有所不同,因而两者的控制结构是类似的。由于采用磁链矢量Ψ定向,Ψ的位置角γ由αβ坐标系下电网电压α、β轴分量eα、eβ积分所得的磁链分量ψα和ψβ计算而得,即
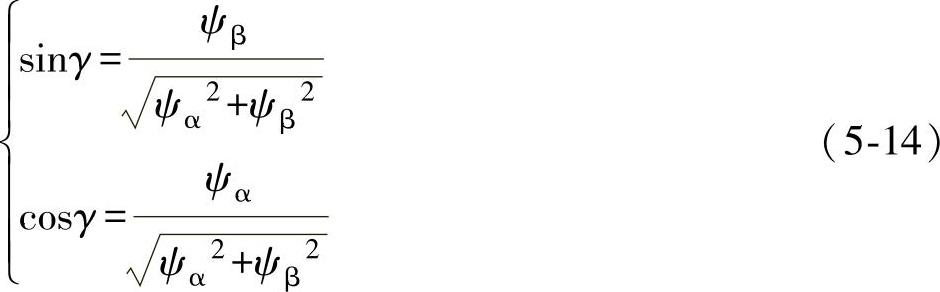
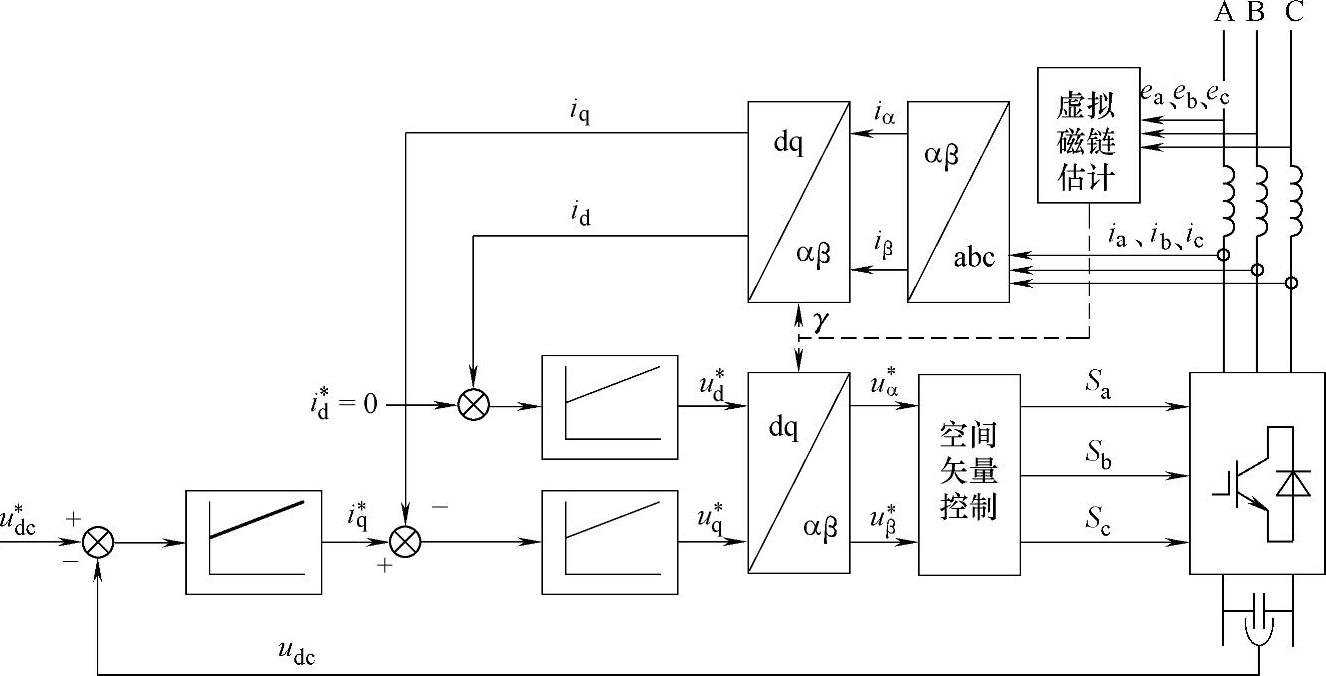
图5-12 基于虚拟磁链定向的矢量控制(VFOC)的结构
值得注意的是,基于虚拟磁链定向的矢量控制须克服积分漂移问题,否则将同样影响矢量定向的准确度,以下具体研究这一问题。
5.2.3.2 虚拟磁链定向时积分漂移的克服[26,27]
当利用电网电压积分以进行虚拟磁链定向时,存在积分漂移问题,主要体现在以下两个方面:
1)当通过AD转换对电网电压进行采样时,由于采样电路中点电压的漂移,通常会导致采样结果中伴随着微小的直流分量,当这个直流分量控制在误差允许的范围内时,对系统实时控制的影响可以忽略。然而,为实现虚拟磁链的定向,则必须对电网电压进行积分,这样直流分量误差量会随着运行时间的增加而越来越大,最终严重影响系统的定向精度。
2)由于电网电压是一个正弦信号,而对正弦信号积分时,其积分结果中会出现一个和积分初值相关的直流分量,同样也会造成定向误差,即

式中 Asin(ωt+γ0)——电网电压信号,其中A表示其幅值,ω表示其角频率,γ0表示积分开始时电网电压的初始相位角。
可见,只有当 时,积分结果中才不会出现这个直流分量。即使控制积分时刻,而从
时,积分结果中才不会出现这个直流分量。即使控制积分时刻,而从 这两个初始相位角开始进行积分,但由于实际电网频率的微小偏移也会造成积分起始时刻的偏移,从而同样无法消除这个直流分量误差,于是也可以导致虚拟磁链的定向误差。
这两个初始相位角开始进行积分,但由于实际电网频率的微小偏移也会造成积分起始时刻的偏移,从而同样无法消除这个直流分量误差,于是也可以导致虚拟磁链的定向误差。
为了能克服上述的两个问题,通常可采用低通滤波器(LPF)的WLPF(s)=1/(s+ωc)取代积分器,由于消除了积分运算,因而初始时刻引起的直流分量的积分效应被完全抑制,如图5-13所示。
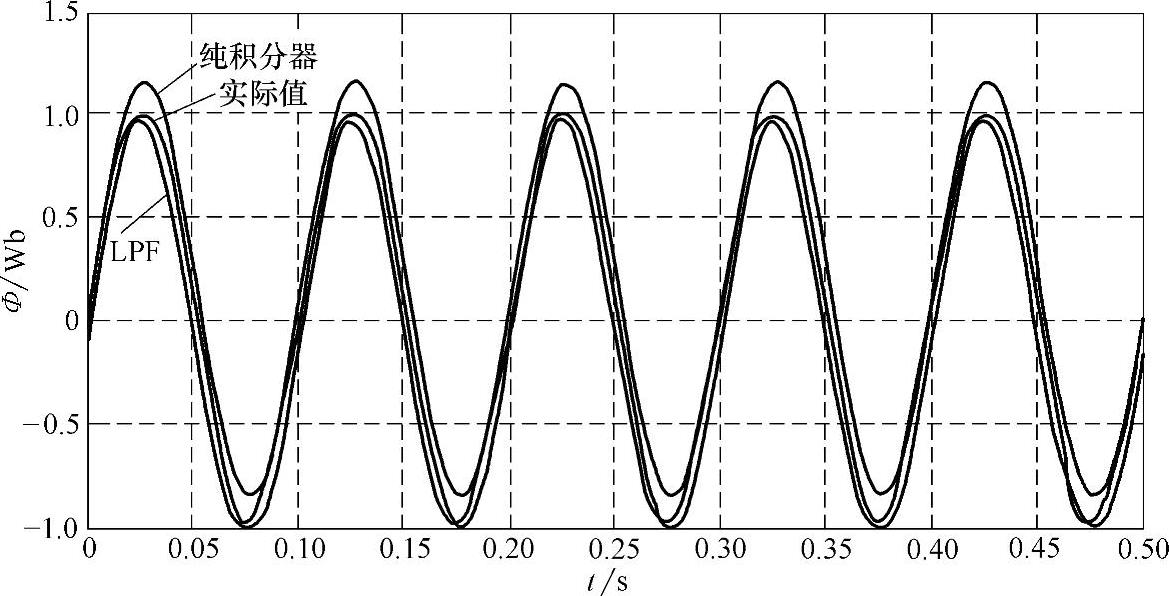
图5-13 纯积分与低通滤波器运算的对比(https://www.xing528.com)
假设输入为纯直流信号,经纯积分环节1/s和LPF环节1/(s+ωc)的输出曲线分别如图5-14a、b所示。可见:若采用纯积分环节,微小的直流分量都将使积分器饱和,如图5-14a所示;而采用LPF环节替换之后,可以消除饱和现象,然而直流分量仍然存在,只能将直流分量降到原有的1/ωc。
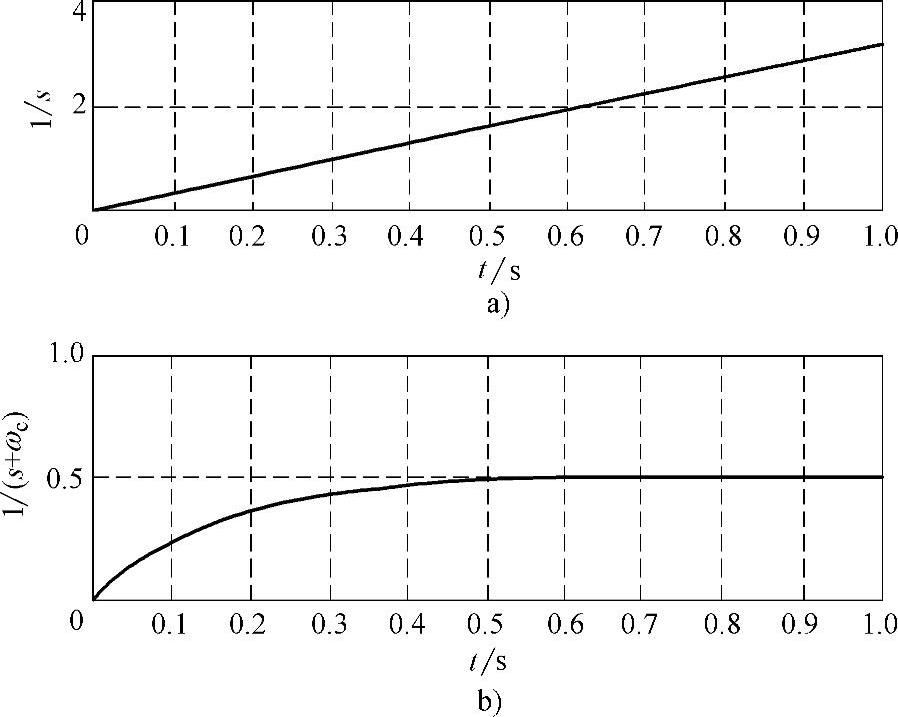
图5-14 两种算法对直流信号的响应
a)纯积分算法 b)低通滤波器算法
为了能彻底消除直流分量引起的误差,可采用改进的虚拟磁链观测模型[26],这不仅能解决初始相位问题,又能彻底消除直流分量带来的影响。这种改进的虚拟磁链观测模型的基本思路是将电网电压E经过低通滤波(LPF)之后再经过高通滤波(HPF)进行补偿,其传递函数为

其中,LPF的截止频率为电网基波频率ωe的k1倍,HPF的截止频率为电网基波频率ωe的k2倍。k1是正的常数,通常按照截止频率的最优范围可设定k1为0.2~0.3,而k2通常设定为k1/2,这里取k1=0.2,k2=0.1。
将一个带有1%直流分量、初始相位为零的正弦信号输入串联的LPF和HPF,其输出结果和实际值的比较如图5-15所示。从图5-15可以看出,电网电压波形经过两个滤波器环节后的响应(如图中补偿前的波形)尽管很快消除了初值误差和直流分量的影响,但稳态时却与实际值之间存在相位和幅值偏差,为此需要对此结果予以补偿,具体的补偿算法讨论如下:
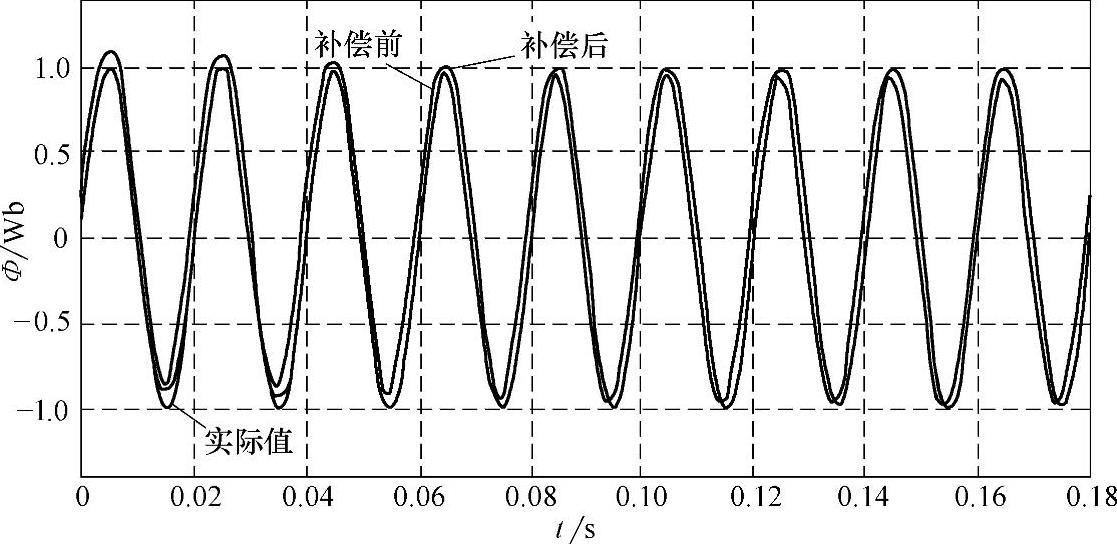
图5-15 改进算法对含有直流分量信号的响应
当采用理想积分器运算时,虚拟磁链矢量ψ和电网电压矢量E之间的关系是

而当采用式(5-16)所示的LPF和HPF运算时,有

比较式(5-17)和式(5-18)得
ψ=ψ′(1-jk1)(1-jk2)=(ψα′+jψβ′)(1-jk1)(1-jk2)=ψα+jψβ (5-19)
因而

从而可根据式(5-20)改进的虚拟磁链获取框图如图5-16所示。
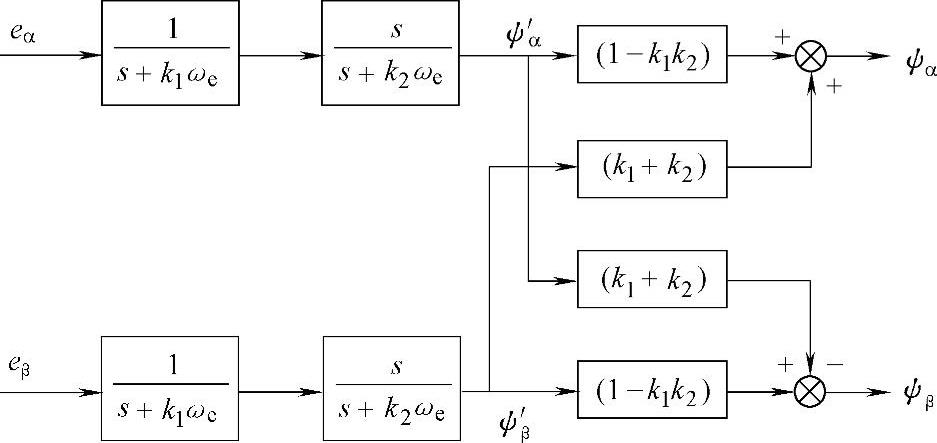
图5-16 改进算法的框图
改进后的效果如图5-15中的补偿后的波形,基本消除了稳态时与实际值之间存在相位和幅值偏差。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。