



若同步旋转坐标系与电网电压矢量E同步旋转,且同步旋转坐标系的d轴与电网电压矢量E重合,则称该同步旋转坐标系为基于电网电压矢量定向的同步旋转坐标系。而基于电网电压定向的并网逆变器输出电流矢量图如图5-6所示。
显然,在电网电压定向的同步旋转坐标系中,有ed=∣E∣,eq=0。
根据瞬时功率理论(见5.3.1.1节),系统的瞬时有功功率p、无功功率q分别为
由于基于电网电压定向时,eq=0,则式(5-10)可简化为

若不考虑电网电压的波动,即ed为一定值,则由式(5-11)表示的并网逆变器的瞬时有功功率p和无功功率q仅与并网逆变器输出电流的d、q轴分量id、iq成正比。这表明,如果电网电压不变,则通过id、iq的控制就可以分别控制并网逆变器的有功、无功功率。
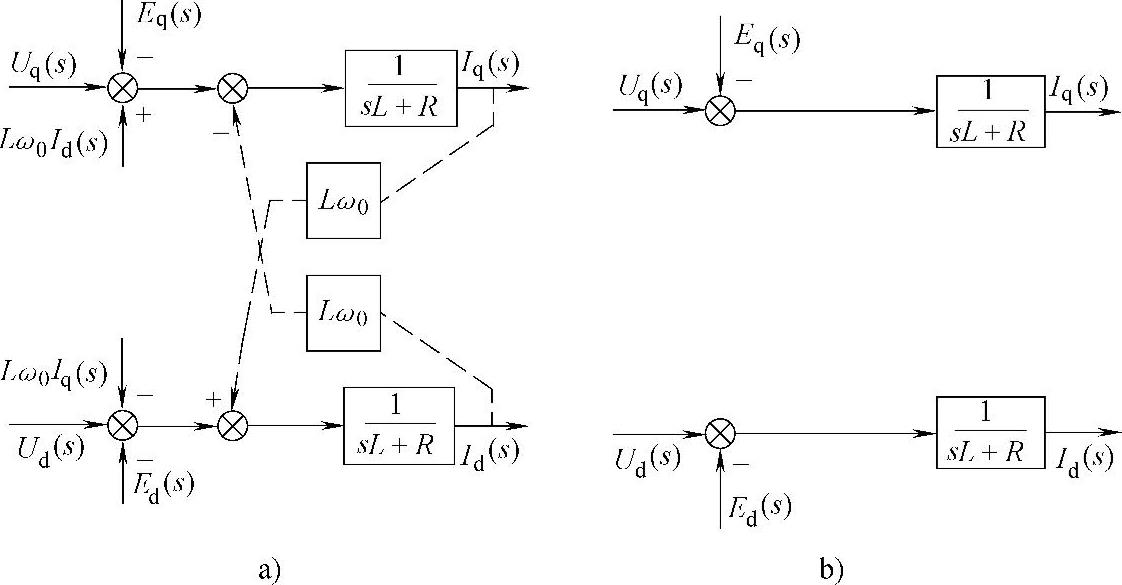
图5-5 引入前馈解耦的模型结构
a)前馈解耦引入的结构示意 b)解耦后的等效模型结构
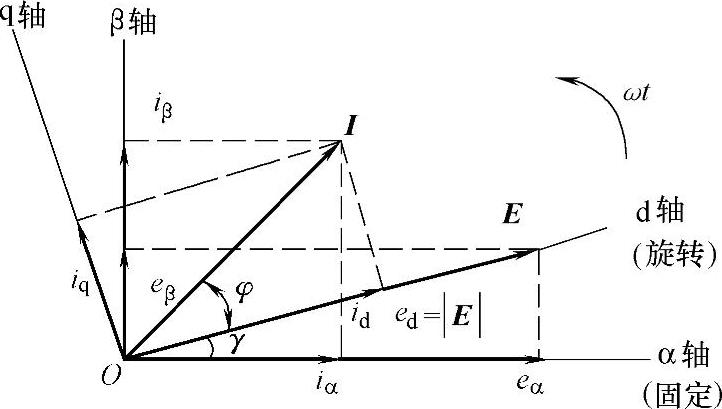
图5-6 基于电网电压定向的矢量控制(VOC)系统矢量图
在图5-1所示的并网逆变器中,直流侧输入有功功率的瞬时值为p=idcudc,若不考虑逆变器的损耗,则由式(5-11)可知: 。可见,当电网电压不变且忽略逆变器自身的损耗时,并网逆变器的直流侧电压udc与并网逆变器输出电流的d轴分量id成正比,而并网逆变器的有功功率p又与id成正比,因此并网逆变器直流侧电压udc的控制可通过有功功率p即id的控制来实现。
。可见,当电网电压不变且忽略逆变器自身的损耗时,并网逆变器的直流侧电压udc与并网逆变器输出电流的d轴分量id成正比,而并网逆变器的有功功率p又与id成正比,因此并网逆变器直流侧电压udc的控制可通过有功功率p即id的控制来实现。
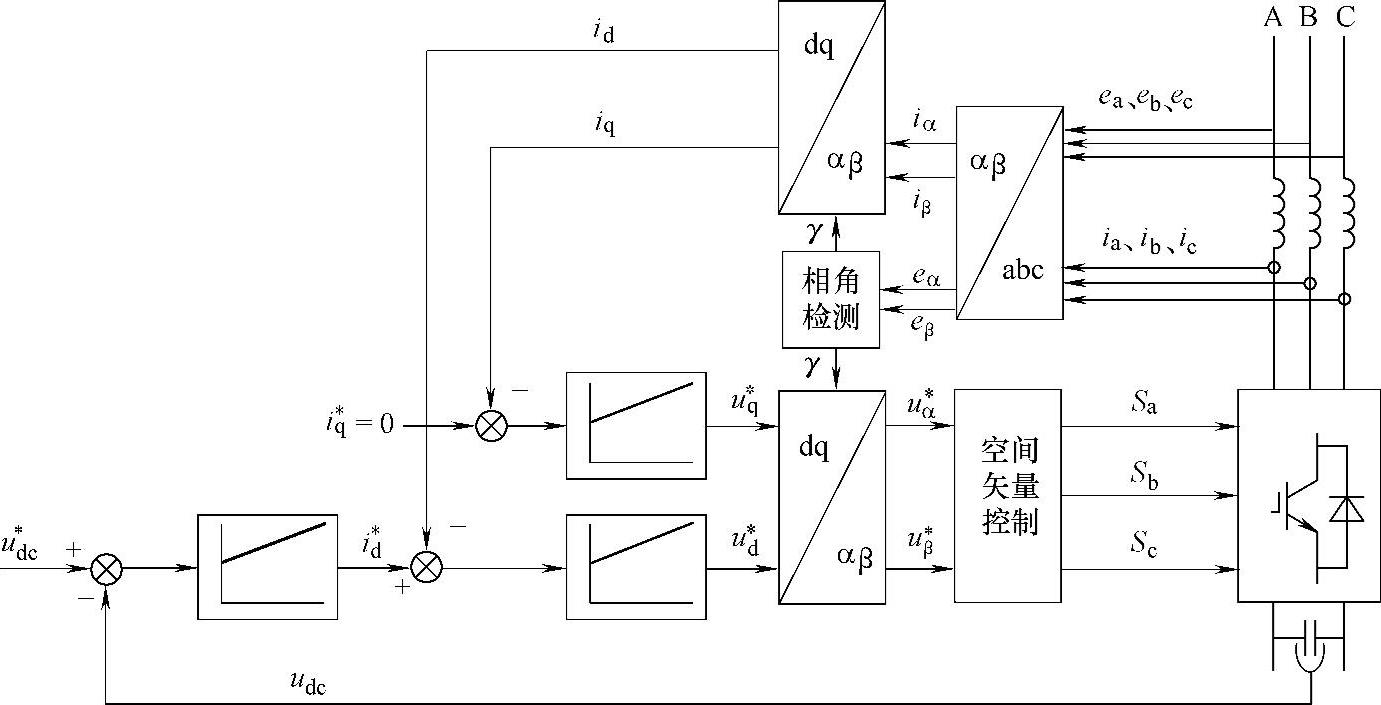
基于电网电压定向的并网逆变器的控制结构如图5-7所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-7 基于电压定向的矢量控制系统(VOC)示意图
控制系统由直流电压外环和有功、无功电流内环组成。直流电压外环的作用是为了稳定或调节直流电压,显然,引入直流电压反馈并通过一个PI调节器即可实现直流电压的无静差控制。由于直流电压的控制可通过id的控制来实现,因此直流电压外环PI调节器的输出量即为有功电流内环的电流参考值id∗,从而对并网逆变器输出的有功功率进行调节。无功电流内环的电流参考值iq∗则是根据需向电网输送的无功功率参考值q∗(由q∗=ediq∗运算)而得,当令iq∗=0时,并网逆变器运行于单位功率因数状态,即仅向电网输送有功功率。
电流内环是在dq坐标系中实现控制的,即并网逆变器输出电流的检测值ia、ib、ic经过abc/αβ/dq的坐标变换转换为同步旋转dq坐标系下的直流量id、iq,将其与电流内环的电流参考值id∗、iq∗进行比较,并通过相应的PI调节器控制分别实现对id、iq的无静差控制。电流内环PI调节器的输出信号经过dq/αβ逆变换后,即可通过空间矢量脉宽调制(SVPWM)得到并网逆变器相应的开关驱动信号Sa、Sb、Sc,从而实现逆变器的并网控制。
另外,图5-8中的坐标变换的相角信息γ是通过式(5-2)计算得到的,eα、eβ值是通过检测电网电压(ea,eb,ec)并经abc/αβ的坐标变换运算得到的。
若采用前馈解耦控制,且采用电网电压的前馈控制以补偿电网电压变化对系统控制的影响,解耦后的id电流内环控制结构如图5-8所示(iq电流环与id电流环相同)。当开关频率足够高时,其逆变桥的放大特性可由比例增益KPWM近似表示。
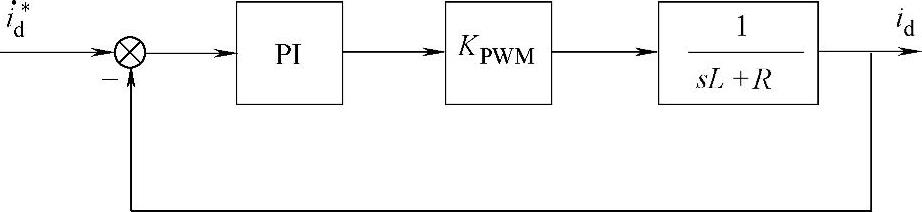
图5-8 电流内环控制结构
前面的分析表明,并网逆变器的直流电压是通过逆变器的有功功率p即有功电流id进行控制的,而又由图5-1分析易得: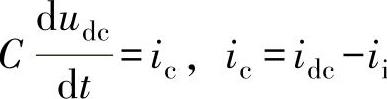 。因此要构建并网逆变器的直流电压外环,关键在于求得电流内环的输出id与逆变桥直流输入电流idc之间的传递关系。
。因此要构建并网逆变器的直流电压外环,关键在于求得电流内环的输出id与逆变桥直流输入电流idc之间的传递关系。
实际上,由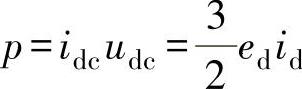 ,可得
,可得 ,若令稳态时udc=UDC,则
,若令稳态时udc=UDC,则

从而可得直流侧电压外环的控制结构,如图5-9所示。
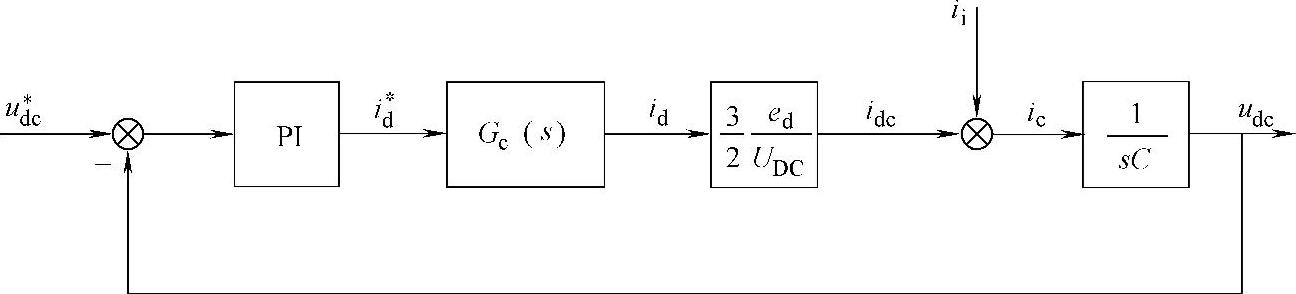
图5-9 直流侧电压外环控制结构
图中,Gc(s)表示电流内环的闭环传递函数。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。