



由图5-2分析,在三相静止abc坐标系下,并网逆变器的电压方程为

其中,令矢量Xabc=(xa,xb,xc)T,x表示相应的物理量,下标表示abc坐标系中各相的变量,而Xabc∈(Eabc、Uiabc、Iabc)。
当只考虑三相平衡系统时,系统只有两个自由度,即三相系统可以简化成两相系统,因此可将三相静止abc坐标系下的数学模型变换成两相垂直静止αβ坐标系下的模型,即
Xβα=TXabc (5-5)
式中 T——变换矩阵,
Xβα——矢量,Xβα=(xβ,xα)T。
显然,相应的逆变换可表示为Xabc=T-1Xβα,将其代入式(5-4)并化简得

再将两相静止αβ坐标系下的数学模型变换成同步旋转dq坐标系下的数学模型,即
Xqd=T(θ)Xβα (5-7)
式中 T(θ)——变换矩阵, ;(https://www.xing528.com)
;(https://www.xing528.com)
Xqd——矢量,Xqd=(xq,xd)T。
联立式(5-7)和式(5-6)并进行相应的数学变换可得

式中 ω0——同步旋转角频率,且ω0=dθ/dt。
在零初始状态下,对式(5-8)进行拉氏变换,可得到系统在同步旋转dq坐标系下并网逆变器频域的数学模型为

与式(5-9)相对应的模型结构如图5-4所示。
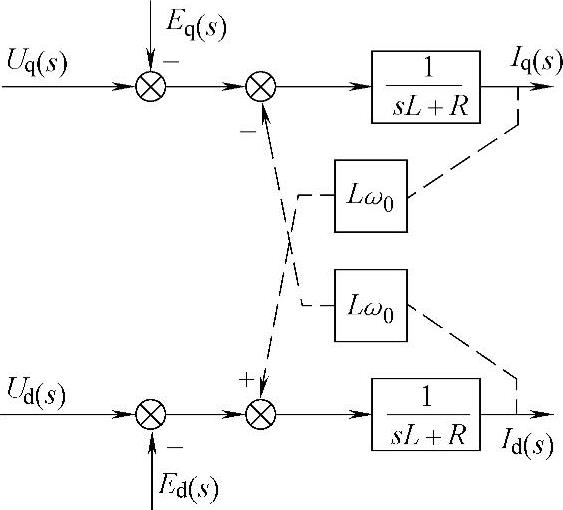
图5-4 系统在同步坐标系下的模型
显然,从图5-4可以看出,在dq坐标系中,并网逆变器的数学模型在d、q轴间存在耦合。为了实现dq轴的解耦控制,通常可以采用较为简单的前馈解耦策略,如图5-5所示,即在并网逆变器输出交流电压中分别引入前馈量+Lω0Id(s)和-Lω0Iq(s),使其与图5-4模型中的耦合项-Lω0Id(s)和+Lω0Iq(s)分别进行对消,从而实现了dq轴间的解耦,解耦后的系统模型转化为相互独立且完全对等的两部分,如图5-5b所示。前馈解耦实际上是一种开环解耦方案,其控制简单且不影响系统稳定性,然而这种前馈解耦的性能取决于系统参数,因而难以实现完全的解耦,实际上,前馈解耦是一种削弱耦合的补偿控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。