



1.刚性体和光滑体
为了理解各种不同类型的虚拟部件的机械行为,首先来看基本类型的刚性体和光滑体虚拟部件。刚性虚拟部件是刚体,不承受变形。定义了刚性虚拟部件的面或边,因为与刚性虚拟部件相连的缘故,即使受载也不会改变形状。如图1-156中的中心孔,想象其中有一轴通过,右边受拉伸载荷。如轴比图中的分析对象刚硬得多而和圆孔完全焊接(或粘接)在一起,就可将轴简化为刚性虚拟部件。其做法是在圆孔上定义一个刚性虚拟部件。当然,对这根轴的应力状态以及与轴相连的部位
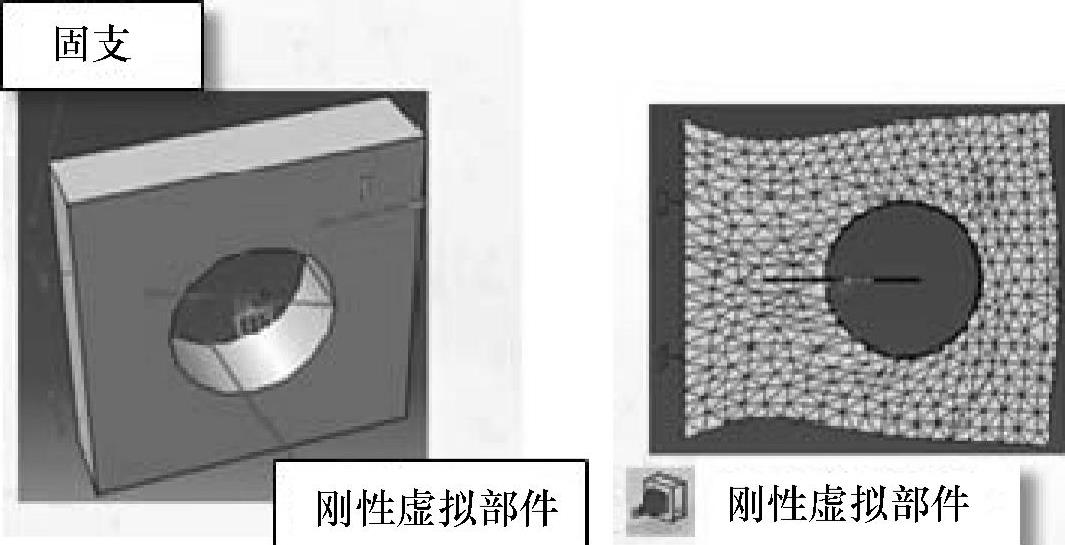
图1-156 刚性虚拟部件的机械行为
的应力状态都不是要关心的事项。可看到中心孔的形状在变形前后都保持为圆形不变。
与刚性虚拟部件相反,如果要让与虚拟部件相连的部位有一定的变形,可以使用光滑体虚拟部件。但是,在使用光滑体虚拟部件时,要注意光滑体虚拟部件的变形是按“一定的规律”来进行的。这个规律就是光滑体虚拟部件的操纵点的变形是相连点变形的平均。
举例来说,在图1-157中,在圆孔上定义了一个光滑体虚拟部件当固支物体的左端,而在操纵点上施加一个往右拉的力,孔以近乎椭圆形而变形。
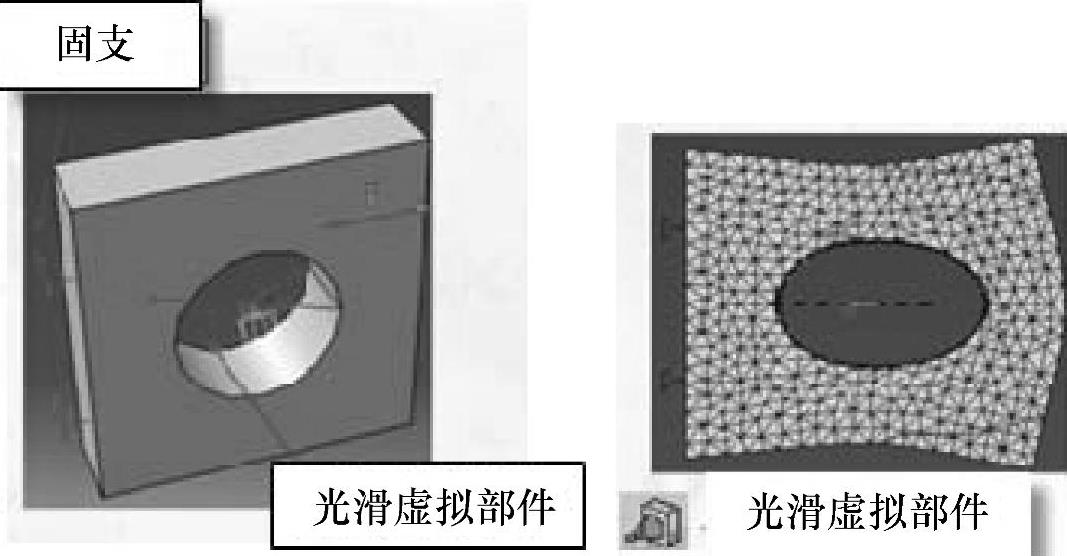
图1-157 定义了光滑虚拟部件物体的变形:孔全体呈向右变形的态势
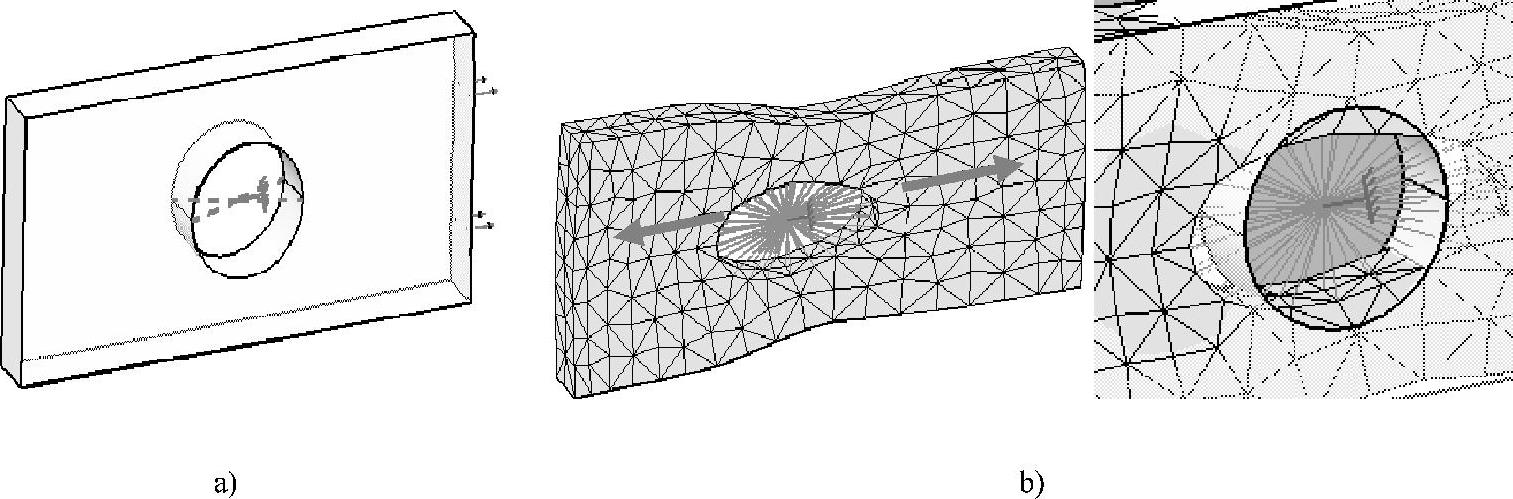
图1-158 光滑体虚拟部件的机械行为
a)孔心固定,右边施加拉力 b)圆孔以孔心为基准向左右两边变形
但是,若如图1-158所示,将光滑虚拟部件的操纵点固定,而在物体的右边施加向右的拉力,则圆孔的变形是以孔心为基准向左右两边等量发展的态势。这种与自然规律不符的现象发生的原因是,光滑虚拟部件的操纵点(圆孔的中心)被固定,其变形为零。圆孔若不以孔心为基准向左右两边等量地变形,作为光滑虚拟部件的操纵点(圆孔的中心)变形时圆孔变形的平均值则不会是零。本来外力是向右的,物体也应向右变形才合理。但在特殊情况下,这种看似不自然的现象也会发生。例如,孔的部分充满橡胶类的不可压缩的材料时,在受力变形过程中,因不可压缩材料的体积不会改变,就可能发生上述不自然的现象。因此,有时将光滑虚拟部件称为橡胶效应(Rubber Effect)。
2.光滑虚拟部件的陷阱
光滑虚拟部件另有一个有趣现象,如不注意,在使用时会导致不应有的错误。在图1-159中,对同一设计对象,光滑虚拟部件的定义可有两种方式:①将4个面用一个光滑虚拟部件连接;②对每一个面用一个光滑虚拟部件连接至操纵点。因有4个面,所以共用4个光滑虚拟部件,它们享有同一操纵点。粗看起来,两者似无差别,但它们的机械行为却大不一样。
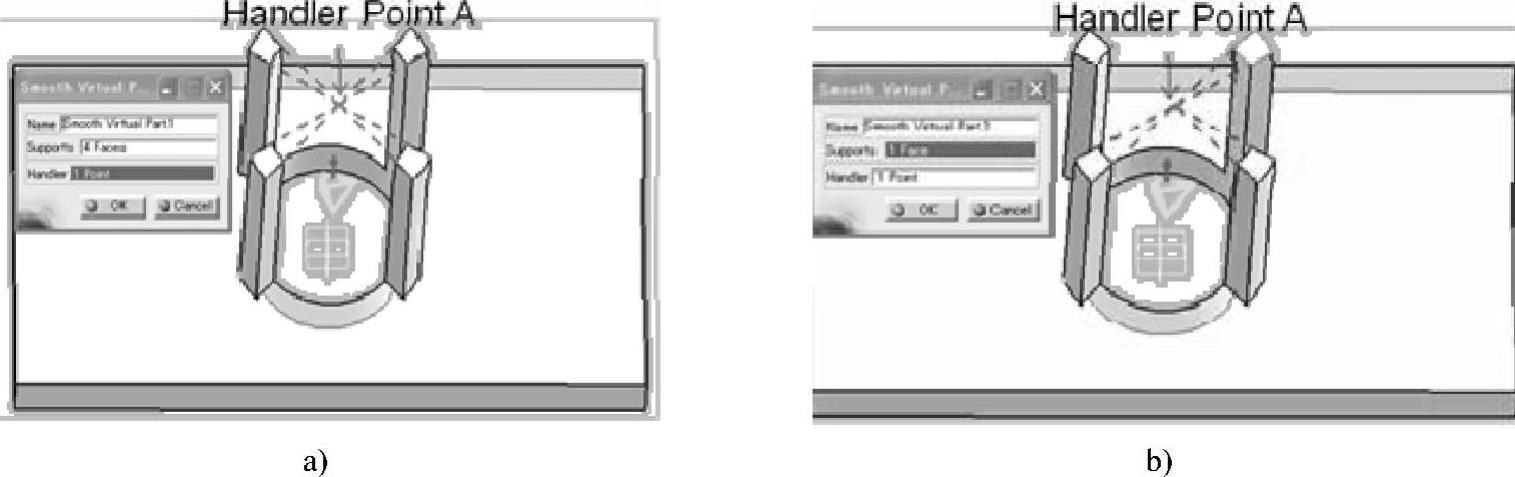
图1-159 光滑虚拟部件还有一个有趣的现象
a)将4个面用一个光滑虚拟部件连接起来 b)对每一个面用一个光滑虚拟部件来连接到操纵点上
分别对两种情况作计算。第一种情况是,长方形块体左边固定,在操纵点A施加10000N右拉力,其变形结果如图1-160所示。
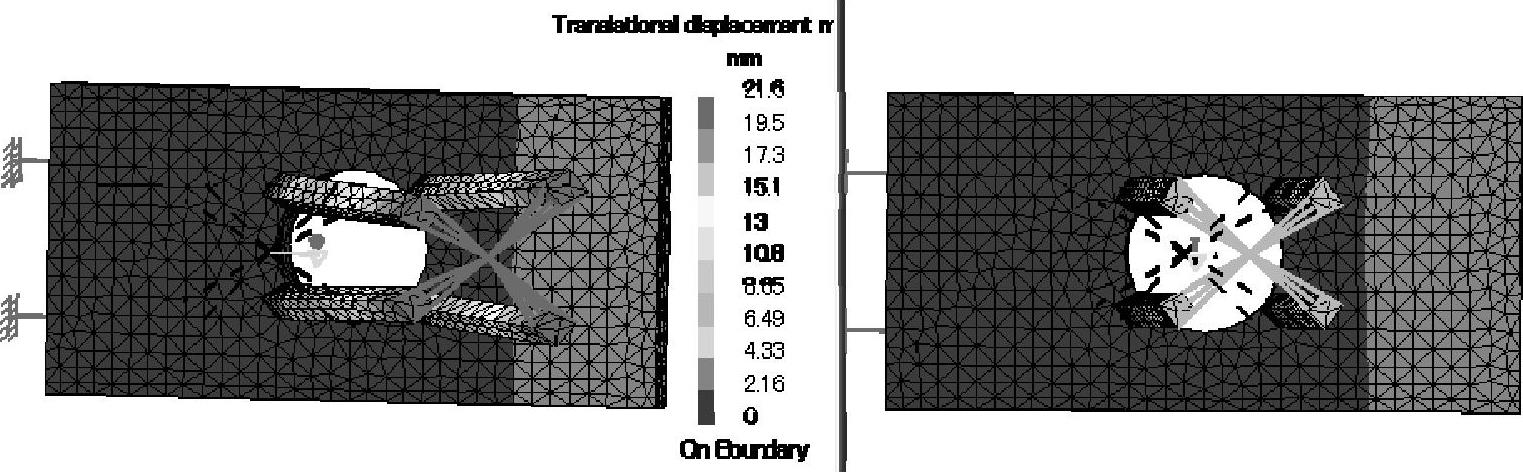
图1-160 变形结果
从变形的结果可看出,将4个面用一个光滑虚拟部件连接时的变形较用4个光滑虚拟部件的变形大很多(图中的调色板已一致)。
第二种情况是,将操纵点A固定,在长方形块体的右边施加10000N右拉力,其变形结果如图1-161所示。
同样,从变形结果可看出,将4个面用一个光滑虚拟部件连接时变形较用4个光滑虚拟部件的变形大很多(图中的调色板已一致)。可见,即使边界条件相同,只是使用的光滑虚拟部件个数不同也会带来不一样的结果。假定,这4个立柱由另外一个物体连接,而用光滑虚拟部件来取代这个连接物体,从物理意义上讲则需用将4个面用一个光滑虚拟部件连接起来的方法。而另一方面,刚性光滑虚拟部件则没有这种特性。

图1-161 变形结果(https://www.xing528.com)
3.虚拟部件和NASTRAN单元的对应关系
对使用过NASTRAN的人员而言,常问到虚拟部件和NASTRAN的单元有何对应关系的问题。
其实,NASTRAN中的RBE2(Rigid Body Element Type 2)单元常被用来连接多个节点构成刚性结合。这样的刚性结合也可用多个RBAR单元或者RBE1单元来实现。但常用RBE2单元。
刚性虚拟部件和RBE2的对应关系如下:
刚性虚拟部件=1个RBE2=多个RBE1或RBAR
另外,NASTRAN中的RBE3(Rigid Body Element Type 3)单元常被用来在模型里分配载荷或质量。必须注意的是,RBE3从名字上看有刚性单元的意思,但实际上不对构造物追加任何刚性。在用RBE3的地方,定义在参照点上的力或力矩是以RBE3的形状和定义的局部加权系数来分配。RBE3可以定义每个主节点的局部加权系数,而光滑虚拟部件没有这个定义。光滑虚拟部件和RBE3的对应关系是:
光滑虚拟部件=RBE3(Weight=1)
4.刚性弹簧虚拟部件和光滑弹簧虚拟部件
刚性弹簧虚拟部件和光滑弹簧虚拟部件可看作在刚性虚拟部件和光滑虚拟部件刚体的操纵点的重合节点之间插入了一个弹簧单元。弹簧虚拟部件常用来简化模拟垫圈、防震用的橡胶垫或板簧等弹性部件。
在弹簧虚拟部件上可定义载荷和约束条件。在弹簧虚拟部件完全被约束后则成为接地弹簧(见图1-162)。
5.接触虚拟部件
接触虚拟部件是在刚性虚拟部件和相连物体之间插入了接触单元(见图1-163)。
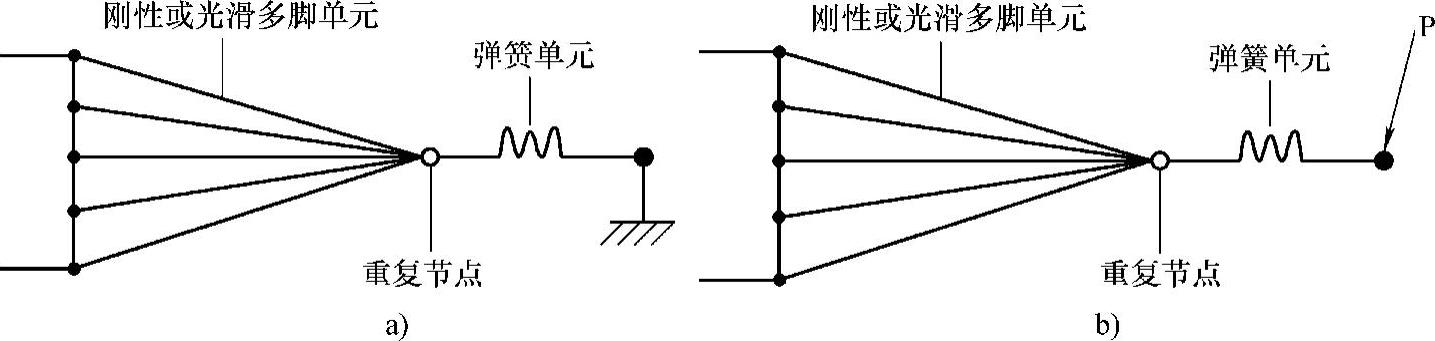
图1-162 接地弹簧和弹簧上施加载荷的情形
a)完全被约束的弹簧虚拟部件成接地弹簧 b)弹簧虚拟部件上施加载荷的情况
如图1-164所示的中心孔,想象其中有一轴通过,右边受拉伸载荷。在此将轴简化为接触虚拟部件。如轴和孔之间密合在一起,即可设间隙量(Clearance)为零。与面接触特性不同的是,接触虚拟部件不考虑摩擦,为了使模型处于静定状态,需约束轴向的平面及X、Y、Z三个方向的转动项,使得接触虚拟部件只能在平面内上、下、左、右的方向移动。
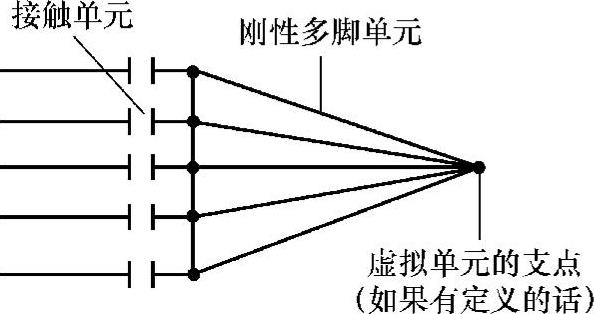
图1-163 接触虚拟部件
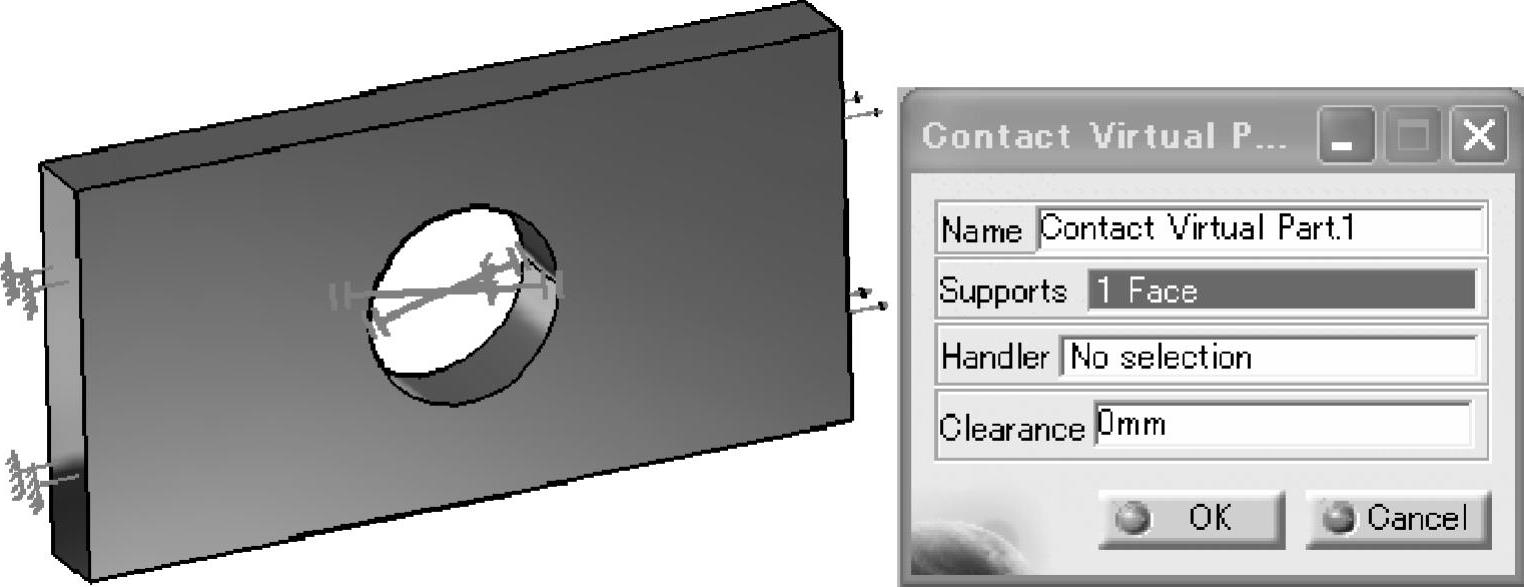
图1-164 中心孔有一轴通过,右边受拉伸载荷
在此将轴简化为接触虚拟部件并固定。此处,假设通过中心孔的轴固定不动,完全约束接触虚拟部件,在长方形块体左边固定而在右边施加拉伸载荷,其变形形态如图1-165所示。
圆孔和轴(接触虚拟部件)相接触的左半边部分由于接触虚拟部件为刚性,圆孔的一半保持圆形不变。而右半部分的圆孔受力后,由于与轴(接触虚拟部件)脱离后变形而不再保持圆形。接触虚拟部件可定义间隙量,这是其重要的特征。在间隙量为正值(>0)时,表示接触虚拟部件和物体之间有间隙。如上述情况,当间隙量>0时,变形后保持圆形的部分将小于圆孔的一半(当间隙量=0时,圆形的部分刚好为圆孔的一半)。正的间隙量可用来表征润滑油膜的厚度。而间隙量也可为负值,表示是过盈配合的情形。这种间隙量的处理,并不改变网格的形状,而是通过作为接触虚拟部件特性之一的间隙量来实现。
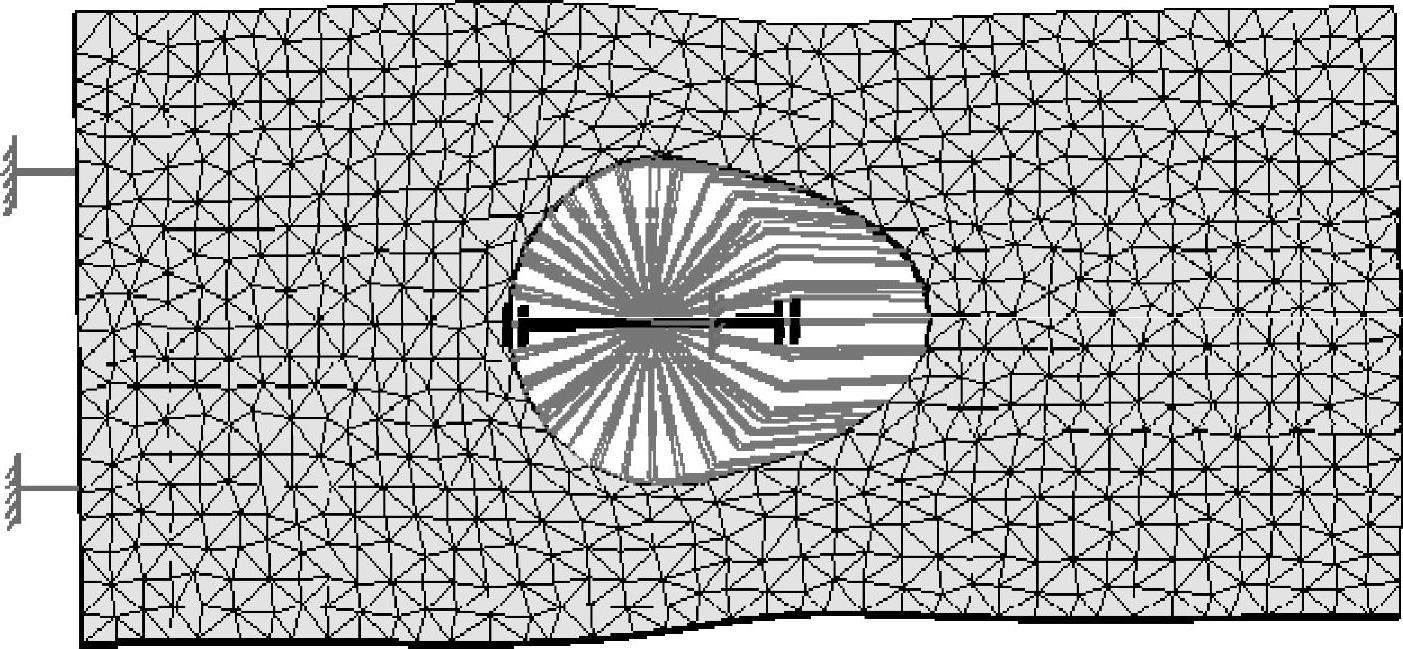
图1-165 使用接触虚拟部件的变形形态
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。