



由于潮汐流速不可预测,潮汐流发电机可能会产生不稳定变化的交流电流和电压。由于潮汐流的能量密度根据潮汐流流速而变化,在并网之前需要进一步对输出功率进行调节。此外,输出电压的频率也应被调节到与电网频率一致。变换系统的输出功率、幅值、相位以及频率调节都是利用电力电子变换器来完成的。DC-AC和AC-DC电力电子接口可用于频率和电压调节。
一座并网海洋潮汐能变换系统的功率调节系统原理如图3.67所示。潮汐涨落导致了水位差的出现。这种水位差推动了水轮机的旋转,潮汐水的流量变化导致了水轮机的转速变化。发电机产生的交流电通过后接一个DC-AC逆变器的三相桥式整流器变换成直流电。DC-AC逆变器的输出一般包含应该被过滤掉的谐波成分。最后,输出功率可以在使用变压器升压和隔离之后并网并传输给用户。
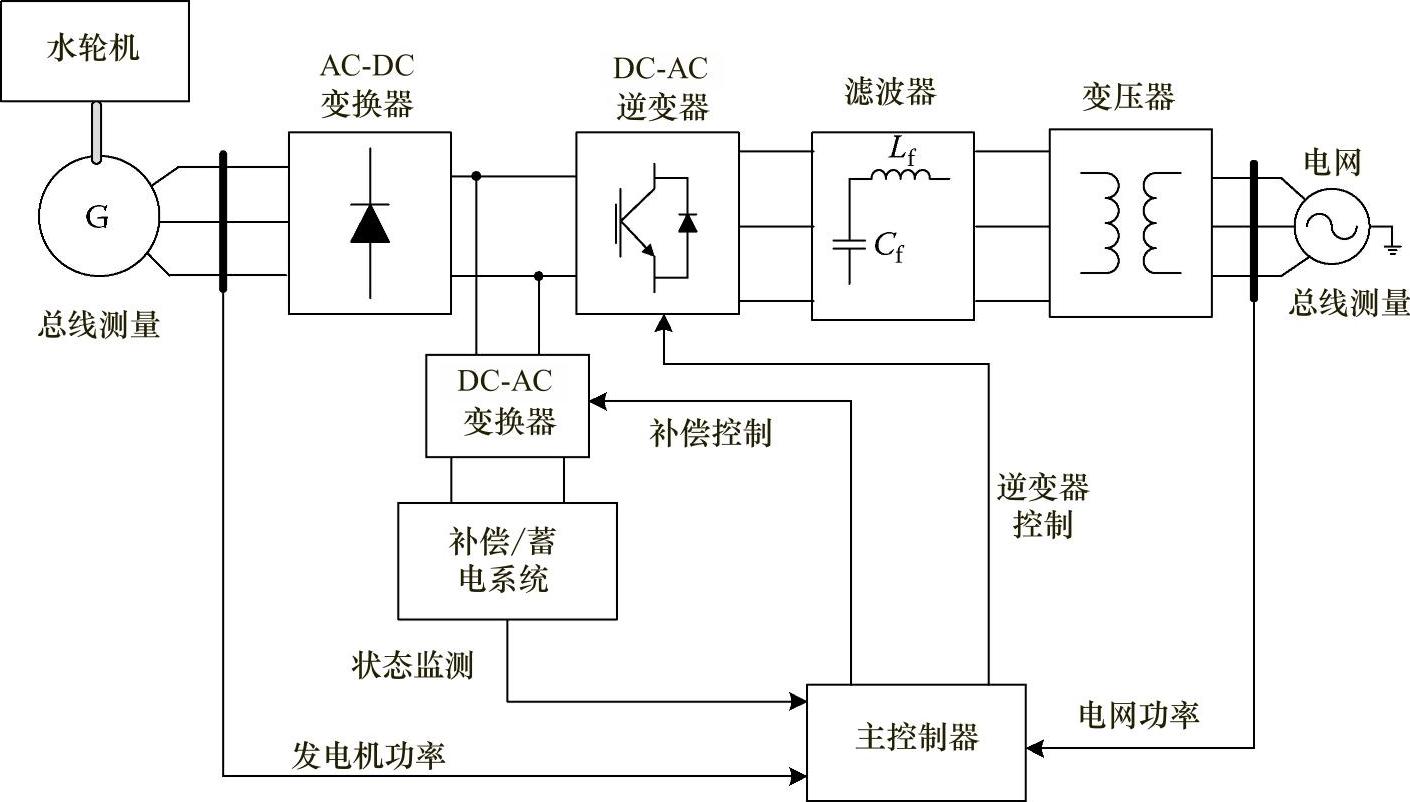
图3.67 潮汐流功率调节系统的并网和控制
潮汐流具有自然周期,而潮汐流发电机产生的电能也会出现间歇性。在出现这些间歇性期间无法产生电能,因此必须在发电机的输出端或者能量调节系统的变换级并联一套能源储存系统。在出现这些间歇性时,可以将储存的电能提供给电网,由此能够确保向电网侧持续供电。相反,如果可用的潮汐电能大于电能需求,则会对这套电能系统进行充电。
潮汐流能量变换系统既可以并网运行,也可以独立(离网)运行。
3.5.1.1 并网系统
在并网系统中,电网和潮汐流发电系统应该是同步的。此外,如果出现故障,比如电网停电或者出现任何突发事件时,应该考虑孤岛(断开连接和重新连接)的问题。此外,为了确保系统高效和可靠运行,就需要使用并网功率变换器。
为了实现电压和频率同步,可以利用锁相环(PLL)方法。PLL方法的工作原理如图3.68所示。锁相环是一个控制系统,它具有一个与输入参考信号的相位具有固定关系的输出信号。PLL机制可以使用模拟电路或数字电路来实现。在这两种机制中,都需要一个相位检测器、一个可变电子振荡器以及一个反馈传感器。
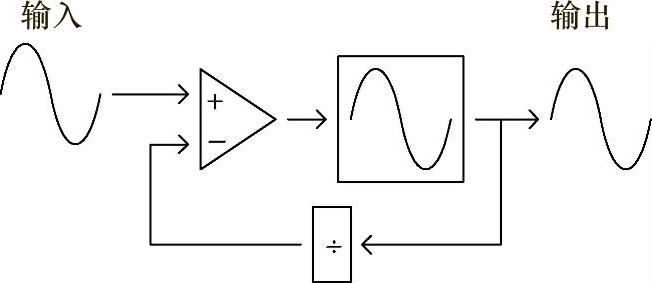
图3.68 简化的PLL基本原理
如果出现任何故障,比如电网欠电压或者过电压、电力电子设备过电流或者过热以及发电机输出欠电压等,并网发电系统可能无法立即检测到停电并自行与电网切断连接[41]。因此,潮汐流发电系统和附近的负载形成一个不靠电网供电的独立“岛屿”[42]。一般来说,孤岛可能会损害整个供电系统和最终用户一方。孤岛会影响到电压和频率的稳定性,这也会造成相位不同步现象。因此,通过适当的检测电路来检测孤岛的存在,这对于潮汐能变换系统来说是至关重要的。图3.69给出了一个孤岛检测系统示意图。
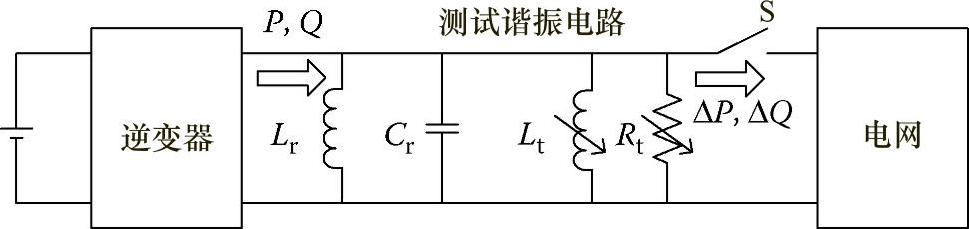
图3.69 孤岛检测电路
该检测电路位于逆变器和电网之间。它包含一个RLC谐振电路。在并网系统中,过/欠频率和过/欠电压检测电路是系统的关键部分。无论出现任何故障,电力电子接口的内部保护都会停止电力供应。如果出现故障,即使电压和频率需求都得到满足,为了防止出现孤岛,也需要额外的检测电路[41,42]。
在并网系统中,逆变器被控制以产生一个稳定的正弦电流。该电流应具有与电网相同的频率,而且应该与电网电压同相。同步锁相环(SPLL)系统可以用于确保这些需求的实现[41]。并网电流跟踪和同步锁相控制系统可以应用于并网系统,如图3.70所示。
在图3.70所示的控制策略中,采用内环来实现实时电流跟踪,附加外循环的目的是为了减小误差。采用零交叉检测器,可以检测出并网系统的幅值和相位,而且还在一个PI控制器中处理该检测值,以产生补偿电流来降低该误差的幅值和相位。给定电流的修正值与SPLL产生的电流信号之和构成了内环的参考电流值。因此,内、外循环合作跟踪给定的电流值[41]。
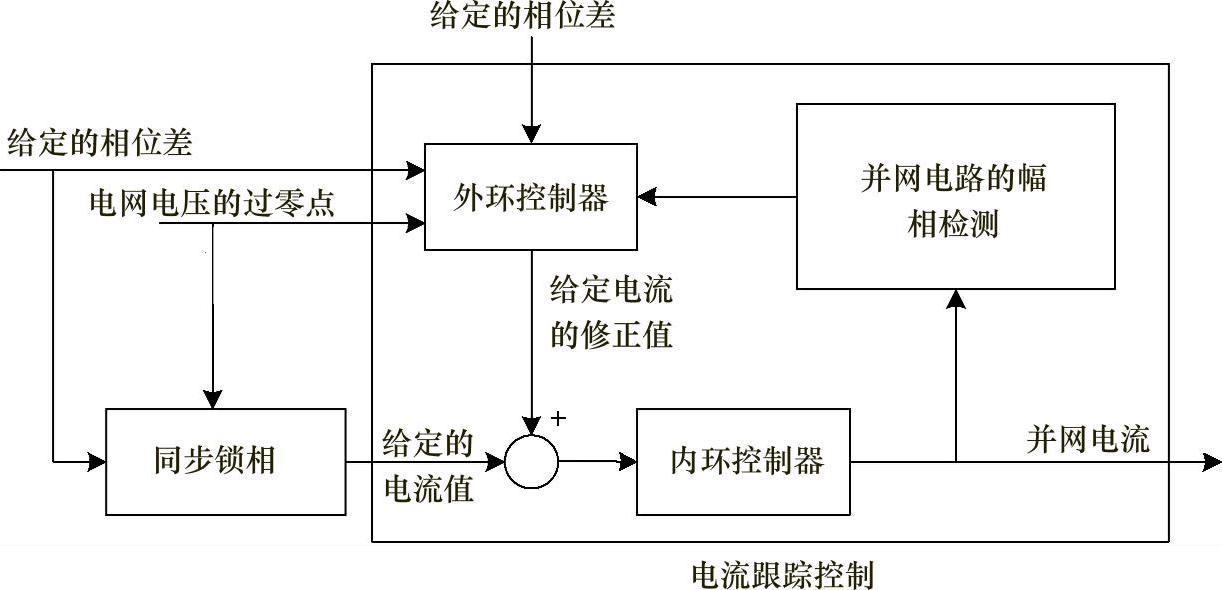
图3.70 并网电流控制
参考点产生的正弦信号是由电网电压过零提供的。因此,SPLL用于产生与电网电压同相的电流。该控制系统框图如图3.71所示[42],其中,Iref为注入到电网的参考电流,Ipredicted为预测的电网电流,Upredicted为预测的电网电压。
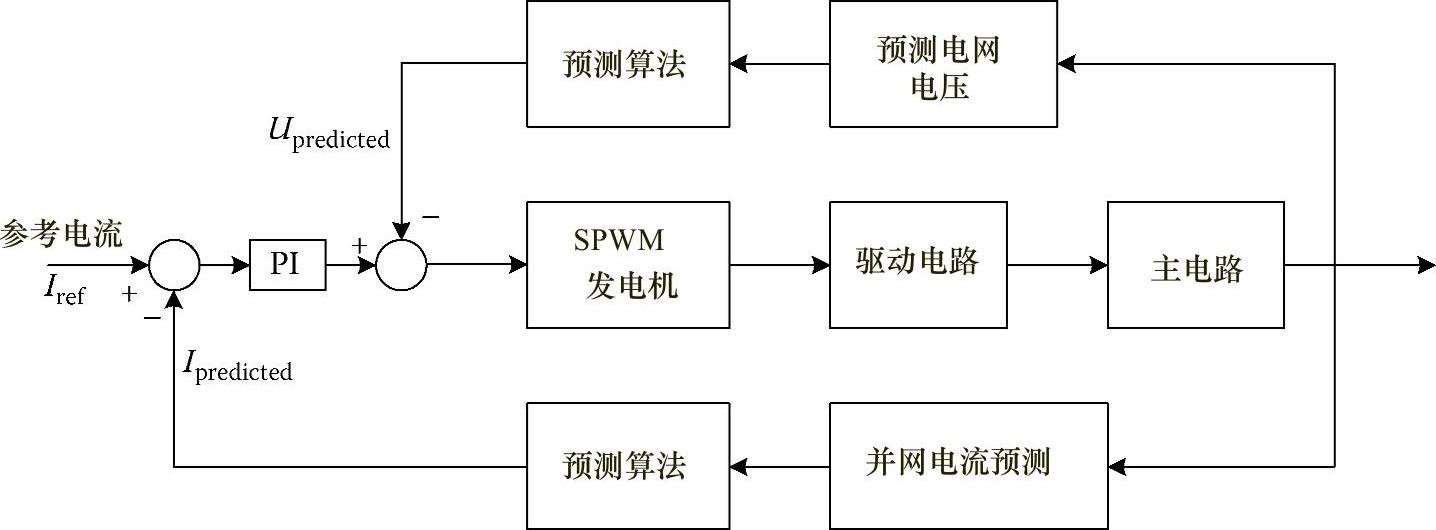
图3.71 内环控制系统
在这种策略中,需要对参考电流与实时并网电流的反馈进行比较。应该指出的是,参考电流具有与电网相同的频率,并且与电网同步。通过三角波调制输出来获得SPWM信号,这些信号被放大后产生一个与电网相位和频率相同的正弦电流信号。
外环控制系统如图3.72所示,只采用内环无法消除交流输入信号的相位和幅值误差。在这种情况下,误差信号是一个稳态余弦函数。应该使用一个附加外环来消除这种稳态误差,来控制并网电流的相位和幅值。相位控制回路的反馈输入通过使用内环产生的并网电流与电网电压之间的相位差来获得。另一方面,使用并网电流的幅值来得到幅值控制回路的反馈输入。该系统利用PI控制器作为控制器来跟踪参考电流,如图3.72所示。
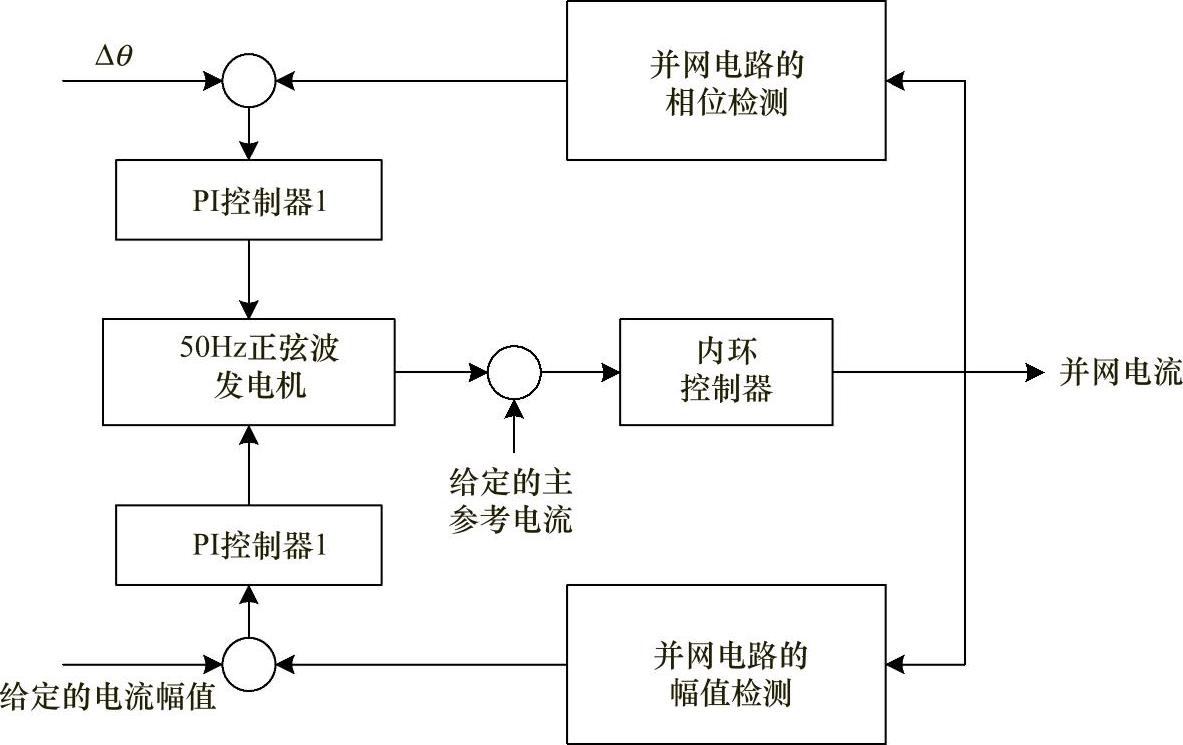
图3.72 外循环控制系统的框图
上述并网技术可以用于使用与变速发电机相耦合的变速水轮机的潮汐流能量应用。双馈异步发电机是变速发电技术之一,作为变速发电机的双馈异步发电机的控制方法通常可以分为两类:速度调节方法和功率调节方法[43-46]。一个使用双向AC-DC-AC电力电子变换器的并网双馈异步发电机如图3.56所示[43,47]。
定子绕组直接与电网相连接,因此由定子侧电流成分诱导的磁通量为恒定值。d轴和q轴磁通可以表示为

式中 λds和λqs——定子参照系中的定子磁通量(Wb);(https://www.xing528.com)
ims——定子参照系中的励磁电流(A);
ids——定子参照系中的定子电流(A);
idr——定子参照系中的转子电流(A)。
q轴磁通方程为

由于定子侧q轴磁通为零,q轴转子电流可以表示为

式中 Lls——漏感(H);
iqs——定子参照系的定子电流(A);
L0——互感(H);
iqr——转子参照系的定子电流(A);
Ls——定子绕组电感(H)。
该发电机的有功输出功率、无功输出功率分别为
式中 vqs和vds——定子参照系中的定子电压(V);
Ps和Qs——定子有功功率(W)和定子无功功率(VAr)。
式(3.66)和式(3.67)用于确定定子d和q轴电流。
由于定子绕组三相对称,定子d轴电压vds为0,因此定子电流仅为式(3.68)给出的转子q轴电流的函数[44,47,48]:

q轴定子电压可以表示为

假设定子电阻很小,利用式(3.63)~式(3.69),可将保留磁通量的定子侧电流分量(ims)表示为

式中 ωe——同步转速(rad/s)。
可将式(3.69)代入式(3.62),求得ids的解,得出式(3.71)给出的关系:

转子d轴电流可用于控制定子的无功功率输出,如式(3.72)所示:

因此,有功和无功功率(Ps*和Qs*)可以使用i*qr和i*dr来控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。