



潮汐水轮发电机的工作原理同风力发电机一致。同步发电机(PMSG和直流无刷发电机)和DFIG双馈在潮汐能发电系统非常常见。
3.4.1.1 同步发电机
在潮汐坝法中使用的发电机大多是同步发电机,它们广泛应用于水力发电中。现在,世界各地超过97%的电力是由同步发电机产生的,因为同步发电机效率非常高,而且易于操作。它们的效率为75%~90%不等。
最简单的发电机形式(见图3.51)由一个定子、一个转子以及相同数量的极点组成。在图3.51中,定子电路有三对相位角为120°的线圈。转子可以是PM(PMSM)或者是由直流电源激励的电磁铁。同步发电机的转子和磁场以同一个恒定转速运行,这就是所谓的同步转速。同步转速可表示为
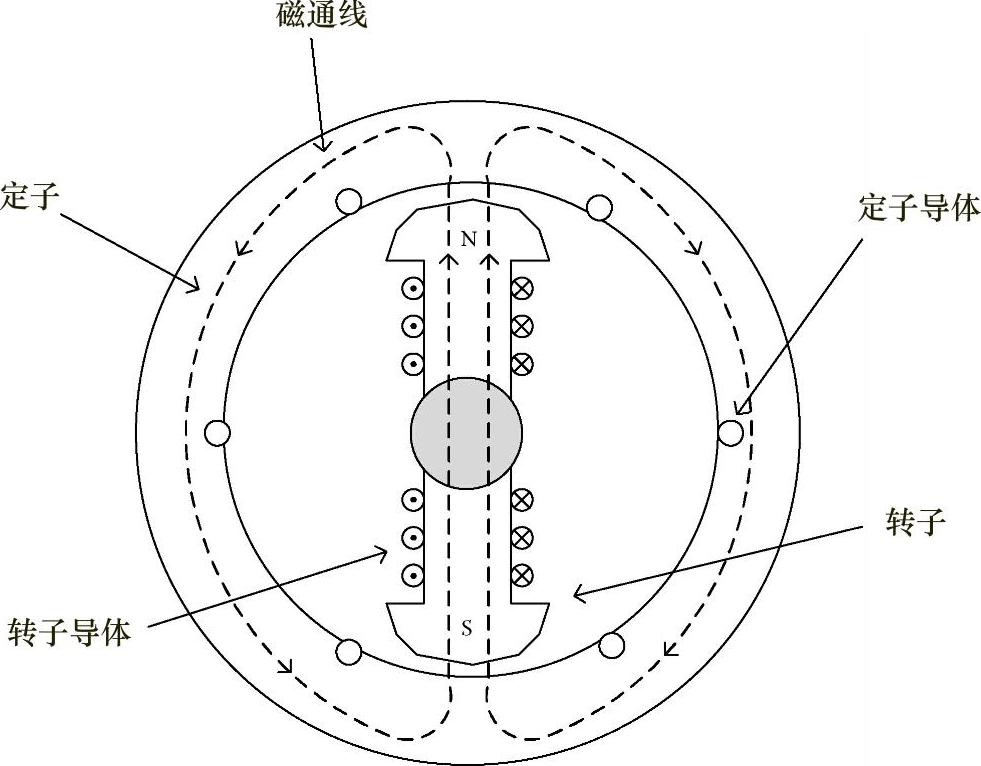
图3.51 两极同步发电机的概念模型

式中 f——频率(Hz);
p——极对数。

式中 ωm——机械角速度;
ω——电角速度。
基于式(3.26)和式(3.27),可以通过控制频率来实现调速。同步发电机的等效电路和相量图如图3.52所示。在这个等效电路中,E0为等效感应电压(反电动势),Z为负载阻抗,E为输出电压,X为同步电抗,I为单相定子电流。式(3.28)为同步发电机的通用电压方程:

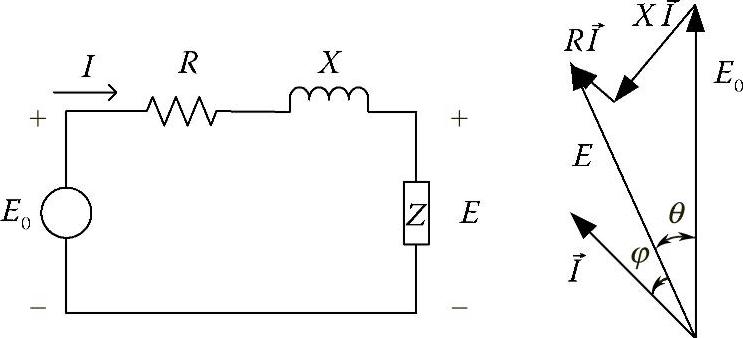
图3.52 同步发电机的等效电路
输出功率和电磁转矩可根据以下两式计算:

式中 φ——功率系数角;
θ——转矩角;
ωm——机械角速度。
PMSM可以通过转子磁场方向的主动矢量控制,来获得更好的转矩特性。图3.53给出了永磁同步发电机的矢量控制。永磁同步发电机是一种转子由永磁制成的同步发电机,因此它的矢量控制比异步发电机简单[30]。
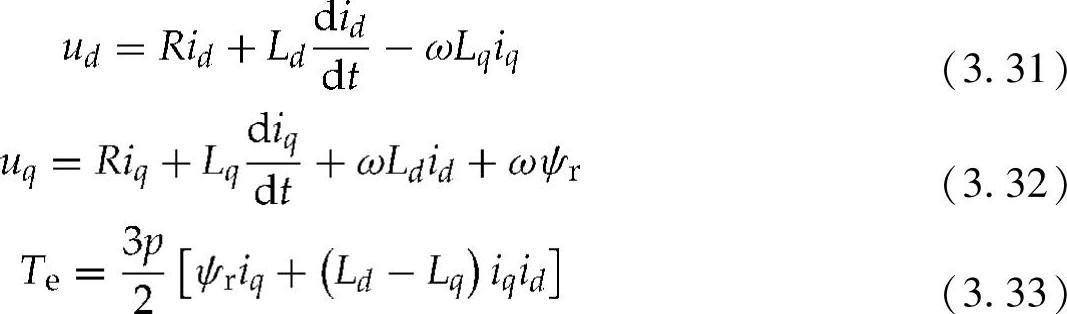
式中 ud和uq——d-q坐标系中的定子绕组电压;
id和iq——d-q坐标系中的定子绕组电流;
R——定子绕组电阻;
Ld和Lq——定子绕组电感;
ψr——转子磁链;
ω——定子角速度;
Te——转子转矩。
常用的方法是将定子电流矢量固定在q轴上,以致d轴部分并不存在。换句话说,旋转的磁链是不变量,而且它不会影响到电磁转矩。因此,电磁转矩为
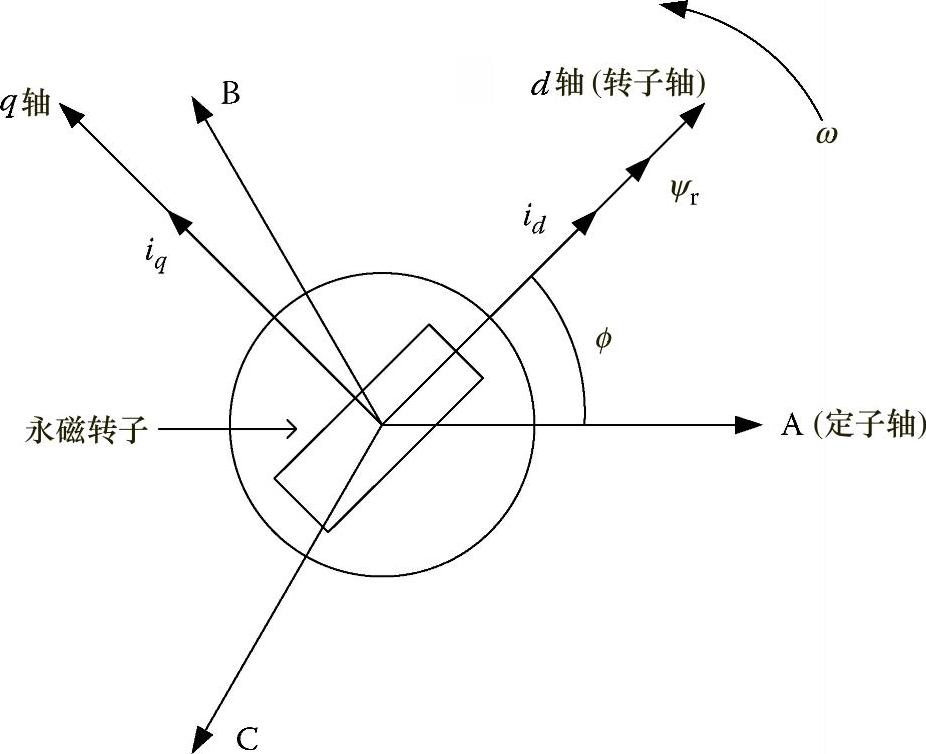
图3.53 PMSM矢量控制方案

由于激励和力矩参数被解耦,因此可以通过调节定子相应的q轴电流来控制电磁转矩。
在使用同步发电机的潮汐动能发电系统中,工作转速随着潮汐流速的波动而随机变化,因此输出电压和频率也是可变的。因此,有必要在发电机与电网之间设置电力电子接口,以控制系统的输出电压和频率。这样就可以将发电机的交流输出转换为直流,然后再将直流电逆变成电网所需的频率和幅值的交流电,如图3.54所示。
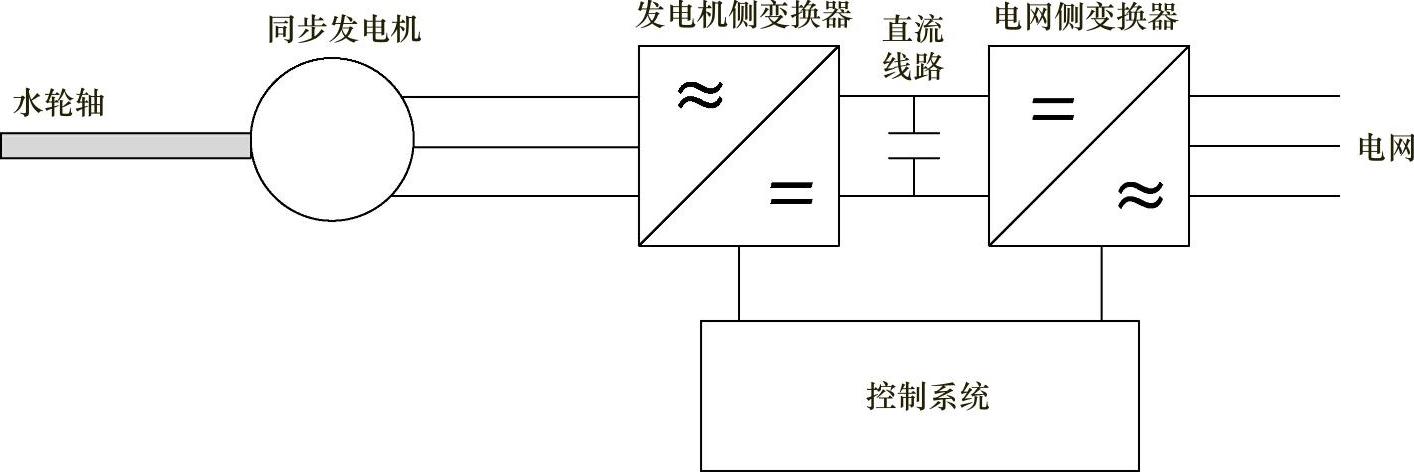
图3.54 同步发电机变速运行
3.4.1.2 异步发电机
相对于同步发电机来说,异步发电机更加坚固耐用,而且通常成本更低。与同步发电机一样,异步发电机也是由一个定子、一个转子以及带有三对线圈的定子电路组成。所不同的是,异步发电机的转子由短路线圈组成。其同步转速与同步发电机相同,如式(3.26)所示。
转速与同步速度之差占同步速度的百分比,称为发电机的转差率。转差率被定义为

式中 Ns——同步速度(每分钟转速);
N——转子转速。
3.4.1.2.1 双馈异步发电机
双馈异步发电机的工作转速范围很广(约为同步速度的±30%)。双馈异步发电机的这种特性为它广泛应用于风力、潮汐能发电创造了机会,其中必须使用变速系统。
相对于感应发电机,双馈异步发电机的定子电路直接与电网相连,但转子电路则是通过集电环与变换器相连,如图3.55所示。(https://www.xing528.com)
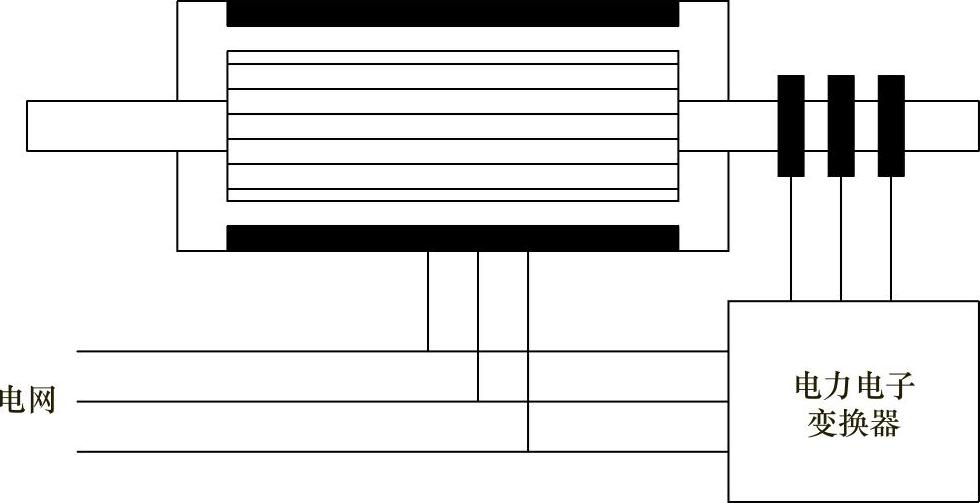
图3.55 双馈异步发电机的电路连接
转子绕组通过背到背变换器连接到电网。两个变换器之间安装了一个直流母线侧电容来储存能量,以减少直流侧的电压纹波。发电机一侧的变换器用来控制双馈异步发电机的转矩或速度,以及定子端的功率因数。电网侧变换器的主要目标是保持直流侧电压恒定[26],如图3.56所示。
图3.57给出了双馈异步发电机的单相等效电路。
根据基尔霍夫电压定律有

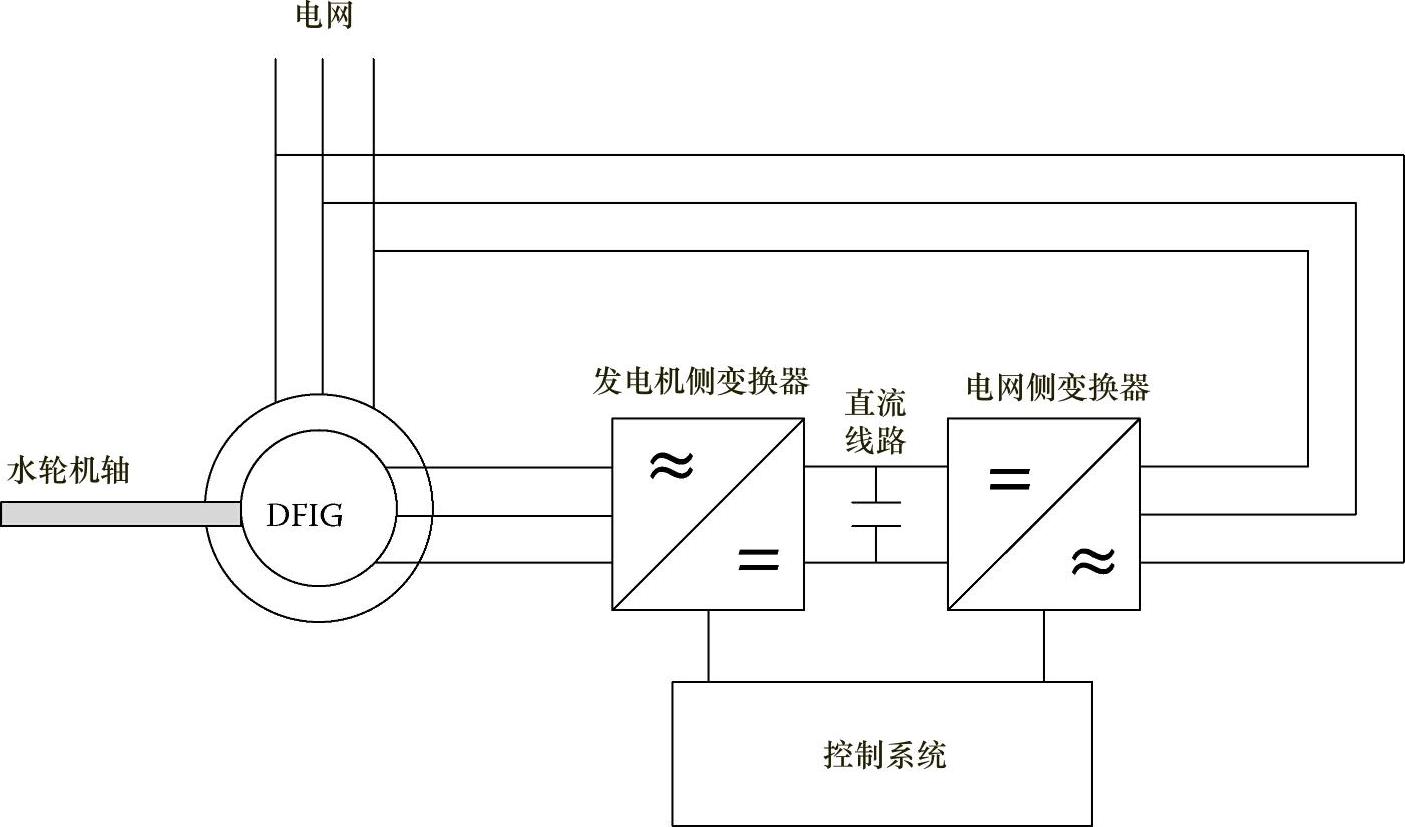
图3.56 使用双馈异步发电机的变速发电
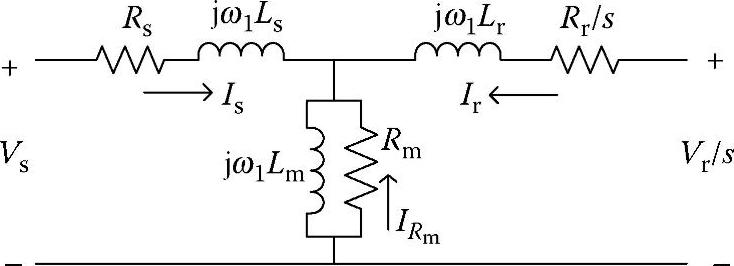
图3.57 双馈异步发电机等效电路(改编自S.Tnani et al.,“A generalized model for double fed induction machines,”IASTED Conference,1995.)

式中 Vs——定子电压;
Rs——定子电阻;
Vr——转子电压;
Rr——转子电阻;
Is——定子电流;
Ls——定子漏感;
Ir——转子电流;
Lr——转子漏感;
IRm——磁化电阻电流;
Rm——磁化电阻;
ω1——定子频率;
Lm——励磁电感;
s——转差率,即

式中 ωr——转子转速;
ω2——转差频率。
3.4.1.2.2 双馈异步发电机的动力学模型
Park模型通常用于双馈发电机建模[16]。根据Blaschke(布拉施克)在1971年提出的矢量控制理论,异步发电机可以用一个使用d、q组件的微分方程系统来描述。Ramuz等人[16]选择了将轴在定子电压矢量(Vsd=0,Vsq=Vs)后移90°作为参照系,如图3.58所示。
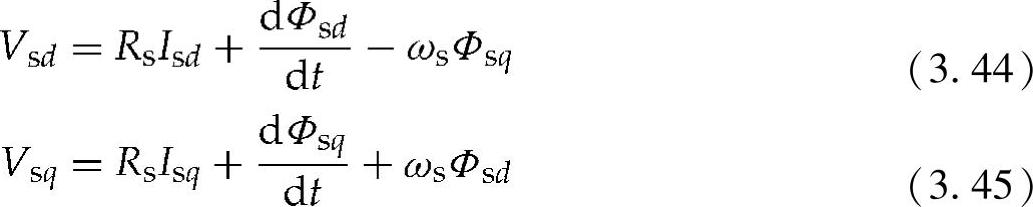
发电机的方程式为

式中 ωs——轴系统(d,q)的角速度;
ω——转子与定子相比的角速度;
Rs和Rr——定子和转子电阻。
其磁通方程式为

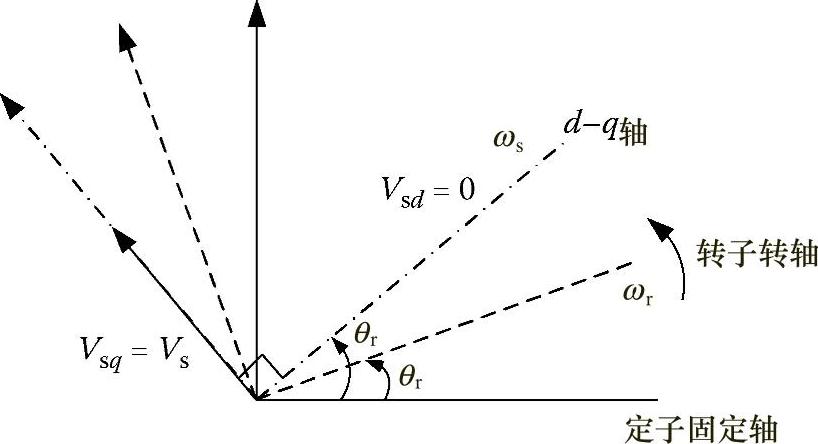
图3.58 双馈异步发电机的旋转d-q轴参照系系统
式中 Ls——定子环电感;
Lr——转子环电感;
M——环互感。
在d-q轴系统中,将式(3.40)代入式(3.43),它们可以表示为

通量方程式变为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。