



图3.26给出了一个基本的水轮机调速系统模型,它由调速器、伺服系统、液压系统以及水轮机组成。
为了实现稳定的控制性能,需要水轮机具有调速瞬态差值特性。这是因为功率相对于导叶门变化的初始反向响应特性。瞬态差值代表调速器调节。对于缓慢变化和稳定状态,调速器表现为调节器的常规低速调节(高增益),而对于较快的频率偏差,调速器则表现为较高速的调节(低增益)。
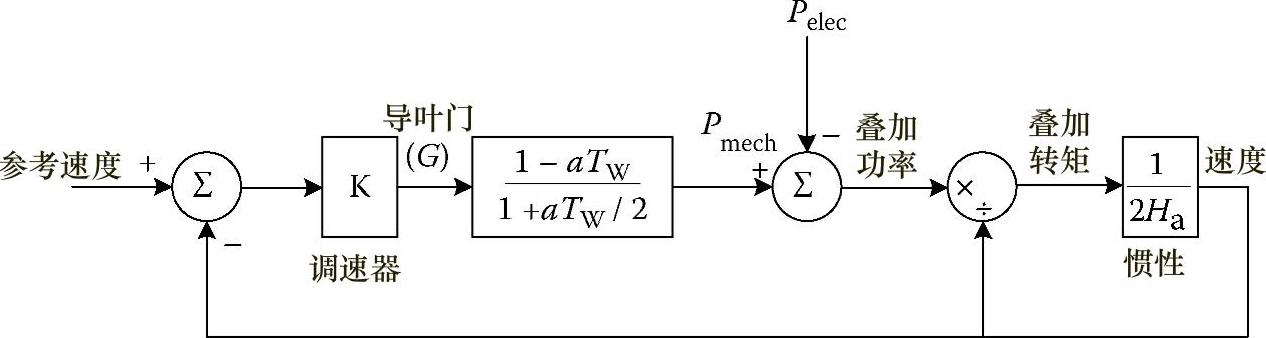
图3.26 水轮机和调速线性模型
调速器主要负责控制液力系统的导叶门开度。调速器一般由先导阀、伺服电动机、限速器、下降补偿系统以及门伺服电动机组成[14,15,17]。这套完整的系统还可以表示为一个线性传递函数。一般来说,调速器可以表示为一个比例(P)、比例—积分(PI)或比例—积分—微分(PID)控制器。另一方面,伺服电动机可以由一阶传递函数来表示。图3.27所示为一个典型的带有永态差值和瞬态差值补偿的伺服系统和伺服电动机的调速器框图。
水轮机门由两级液压位置伺服系统控制,该模型参数如下:
Tp为先导阀和伺服电动机时间常数。
Q为伺服增益。
Tg为主伺服时间常数。
Rp为永态差值。
Rt为瞬态差值。
TR为复位时间或阻尼时间常数。
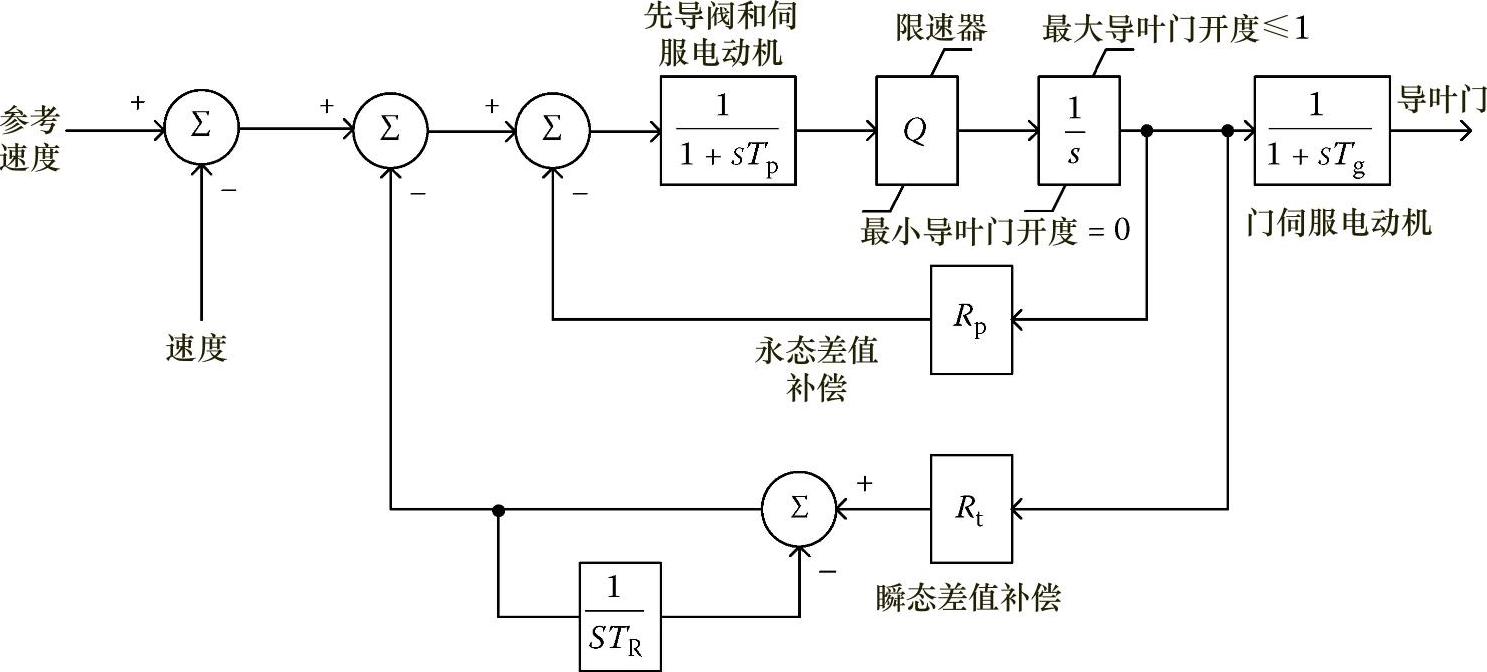
图3.27 典型的水轮机调速器模型
可以使用MATLAB/Simulink来实现对水轮机、调速器以及调速模型的动力学特性分析。水轮机、调速系统、同步电机、励磁电压控制、传输线和三相电网的整体框图如图3.28所示。
在该模型中,同步发电机是额定功率为202mW[3]、相间额定电压为13.8 kV的凸极发电机。它的额定频率为60Hz,极对数为32。因此,每台机组的额定转速为(https://www.xing528.com)

水轮机和调速系统由一个水轮机、一个伺服电动机和一个基于PID的调速器组成。水轮机模型如图3.29所示。该模型是图3.25、图3.26和式(3.8)的Simu-link实现。这个模型中的参数β和tw分别是速度偏差阻尼系数和水流开始时间。伺服电动机系统由一个调节器(PID调速器)来控制,它控制着水轮机的导叶门开度。伺服电动机系统如图3.30所示。
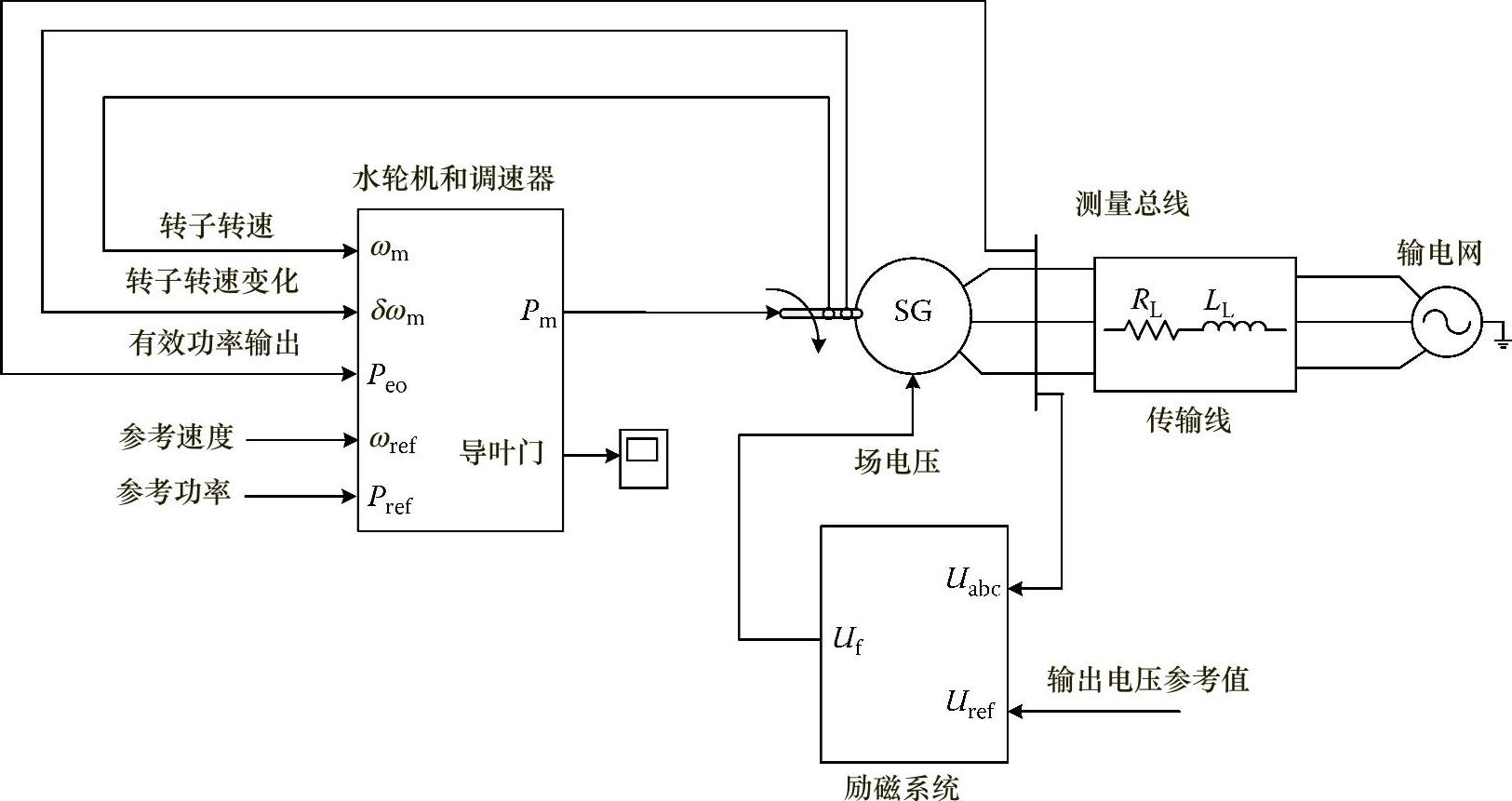
图3.28 与同步发电机耦合的水轮机和调速器
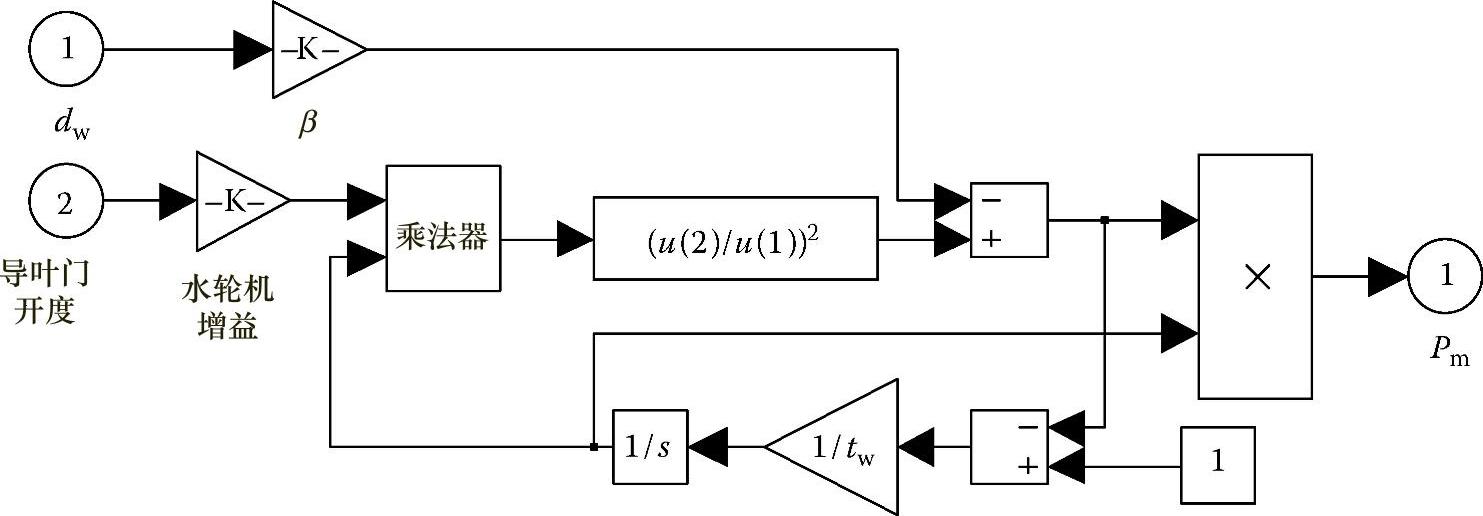
图3.29 水轮机模型

图3.30 伺服电动机模型
伺服电动机的参数Ka=3.33,Ta=0.07s。导叶门开度的最小值和最大值分别设定为0.01和0.985。导叶门开启和关闭速度值分别设定在[-0.5,0.5]p.u./s之间。水轮机的永态差值为0.05p.u.,调速器调节增益Kp=9.304,Ki=0.84,Kd=0(PI型调速器),Td=0.01s。
图3.31给出了一个与水轮机连接的伺服电动机、调节器与永态差值组成的系统。
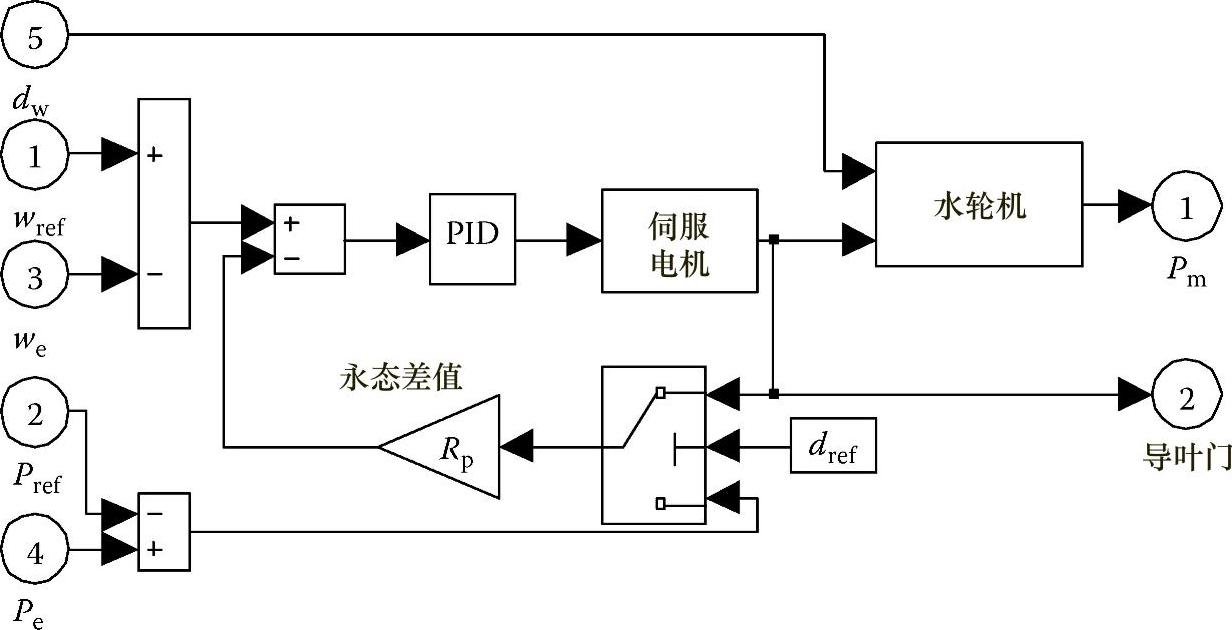
图3.31 完整的水轮机、调速器和伺服电动机模型
图3.28所示的励磁电压控制系统是一个PI控制器。测得的ABC相电压和参考的ABC相电压先被转换为dq轴电压量,然后将参考电压和测量电压进行比较,并根据误差信号值将适当的励磁电压水平应用于调速器,以维持一个固定的发电机输出电压。
水轮机的参考发电基准选定为0.8,参考速度基准为1。从图3.28可以看出,水轮机和调速系统产生机械功率,这个机械功率被输出到发电机的转子轴之上。同步发电机的输出通过RL电路连接到代表传输线的电网。对于22s仿真来说,转子转速设定为1,而在经过较小的振荡之后,转子转速偏差变为0,如图3.32和图3.33所示。图3.34所示为发电机电压,它受控于励磁电压控制器。图3.35中输出到发电机轴的机械能,增加到参考值0.8,它受导叶门开度控制,如图3.36所示。
由于同步发电机的电—机能量转换效率,发电机输出有功功率的波形类似于图3.37。最后,发电机输出相间电压实际值如图3.38所示。应该指出的是,发电机的额定相间电压为13.8kV。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。