



由于同步发电机以电网频率产生电压的同步转速较低,所以它通常用于变速风力机系统。
基于定子、电磁场、阻尼绕组的动态特性,同步发电机模型可以描述成等效的q和d轴电路,如图2.59所示。该模型以dq转子参照系来表示。在此模型中,所有的转子参数和电气值都被变换到定子侧[97,98]。
在图2.59中,下标d和q是指d轴和q轴的对应值,下标r和s是指转子和定子的对应值,l和m是指漏感和励磁电感,而f和k则是指到电磁场和阻尼绕组的对应值。
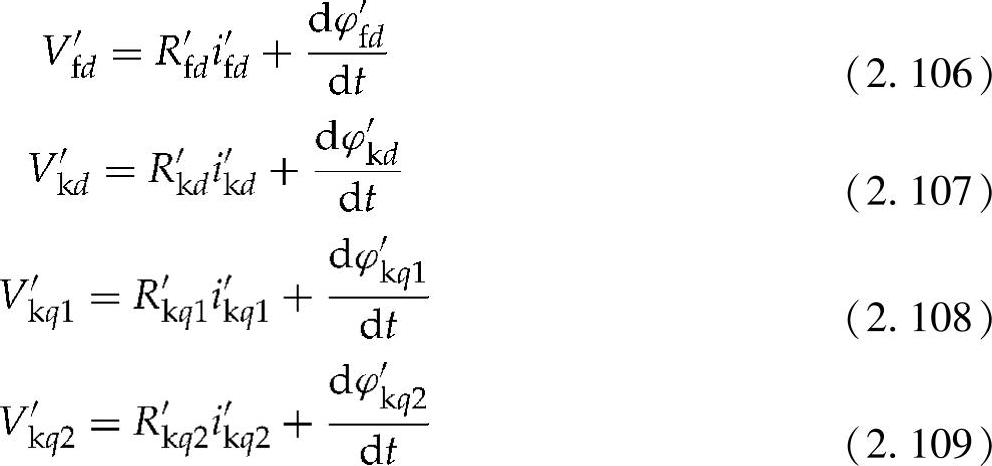
该等效电路的电压方程可以表示为
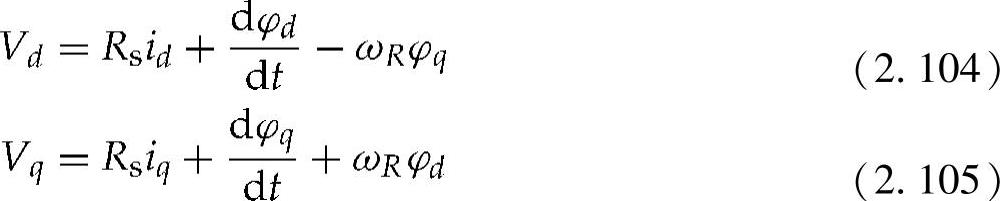

图2.59 同步发电机的q和d轴等效电路
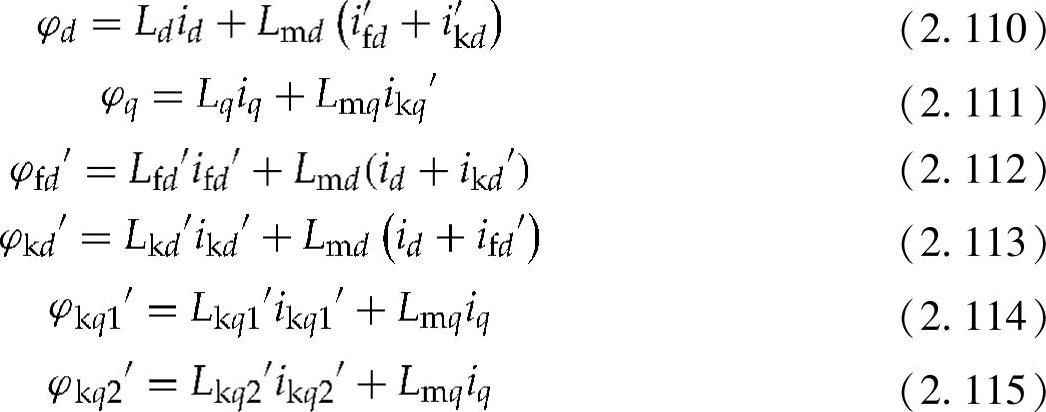
其中,磁通量可以描述为
同步发电机的机械系统可以描述为

式中 Δω(t)——发电机角速度变化;
J——惯性常数;
Tm——机械输入转矩;
Te——感应电磁转矩;
Kd——代表阻尼绕组作用的阻尼系数。
同步发电机可以作为风力机变速运行的合适选择[99,100]。由于桨距角控制机构增加了风力机的成本,并为风力机和发电机带来了压应力,必须通过其他手段来实现运行转速控制的灵活性[101]。变速运行的同步发电机将会产生电压和频率可变的电能。同步发电机的输出电压可以通过用于励磁电压的AVR来控制。不过,感应发电机需要使用可控电容器来控制电压。此外,其运行转速应该高于同步转速,以运行于发电模式[102]。
比同步发电机效率更高的是多极同步发电机,因为后者不必使用齿轮,而且风力机和发电机可以运行于DD模式[103,104]。不过,非多极同步发电机则需要使用齿轮箱,以产生并网所需的频率。另一方面,风力发电系统中的同步发电机还需要使用直流电压源或者AC-DC变换器,以产生励磁绕组所需的励磁电压。风力机与同步发电机连接如图2.60所示。
如果未使用多极同步发电机,那么就应该使用齿轮箱来供风力机—发电机耦合,如图2.61所示。可以使用IGBT桥来替代作为定子绕组整流器的二极管桥。在此例中,定子侧变换器用于有功功率控制,而GSC则用于无功功率控制或者直流母线电压调节。这种方案也可以用于图2.60所示的拓扑结构。(https://www.xing528.com)

图2.60 风力发电系统中的多极同步发电机
在图2.60和图2.61的拓扑结构中,可以使用后接DC-DC变换器的二极管桥来控制由DC-DC变换器产生的励磁电压,而不是使用可控整流器来控制。
作为可控整流器的替代方案,直流链电压或电流可以使用直流链的DC-DC变换器来调节[105,106]。该拓扑结构如图2.62所示。
在这种拓扑结构中,DC-DC变换器由一个PWM发电机来控制,而占空比则是由调节直流链电流的控制器来确定[105]。直流链电流控制器如图2.63所示,其中,I*dc为参考直流链电流,Idc为测量直流链电流,Vin为变换器的输入电压,Vdc为

图2.61 带有用于控制励磁电压的DC-DC变换器的同步发电机

图2.62 带直流链调节的同步发电机
变换器的输出电压。这里的参考直流链电流需要依靠发电机电流—转矩关系图来确定,以获取风力机的最大功率。
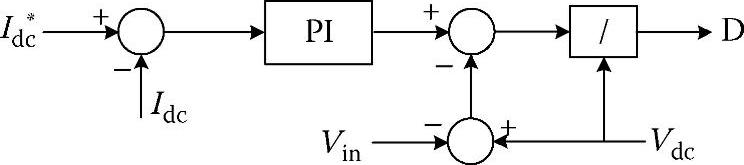
图2.63 DC-DC变换器占空比电流回路
另一方面,并网侧逆变器由一个正弦脉宽调制(SPWM)发电机使用参考d和q轴参考电压Vd*和Vq*来控制。
d轴参考电压使用图2.64所示的d轴电流控制器来确定。参考功率因数通过功率因数控制器决定了d轴参考电流id*,与所测得的d轴电流id进行比较,并通过一个PI控制器将误差减少到零,以确定d轴参考电压Vd*。
q轴参考电压由q轴参考电流和测量电流iq和iq*之差来确定。q轴参考电流是电压控制器的输出,它使用差分参考直流电压V*dc和测量直流电压Vdc之差,如图2.65所示。

图2.64 d轴电压控制器

图2.65 q轴电压控制器
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。