



光伏组件可为空间系统提供所有的能源。自1958年以来,光伏太阳能电池阵列已用于为航天器提供动力,而且已经成为商业和军事航天器的主要动力源[113]。
1.9.4.1 太阳能卫星能源系统
太阳能卫星系统的概念是把外表覆盖庞大的太阳能电池阵列的巨大卫星体放入地球赤道上空22300mile[4]处的地球同步轨道[114]。在一年的绝大部分时间内,每颗卫星都可以一天24h受太阳辐照。由于卫星轴存在23″的斜度,卫星总是在地球的遮盖阴影上面或者下面穿过。
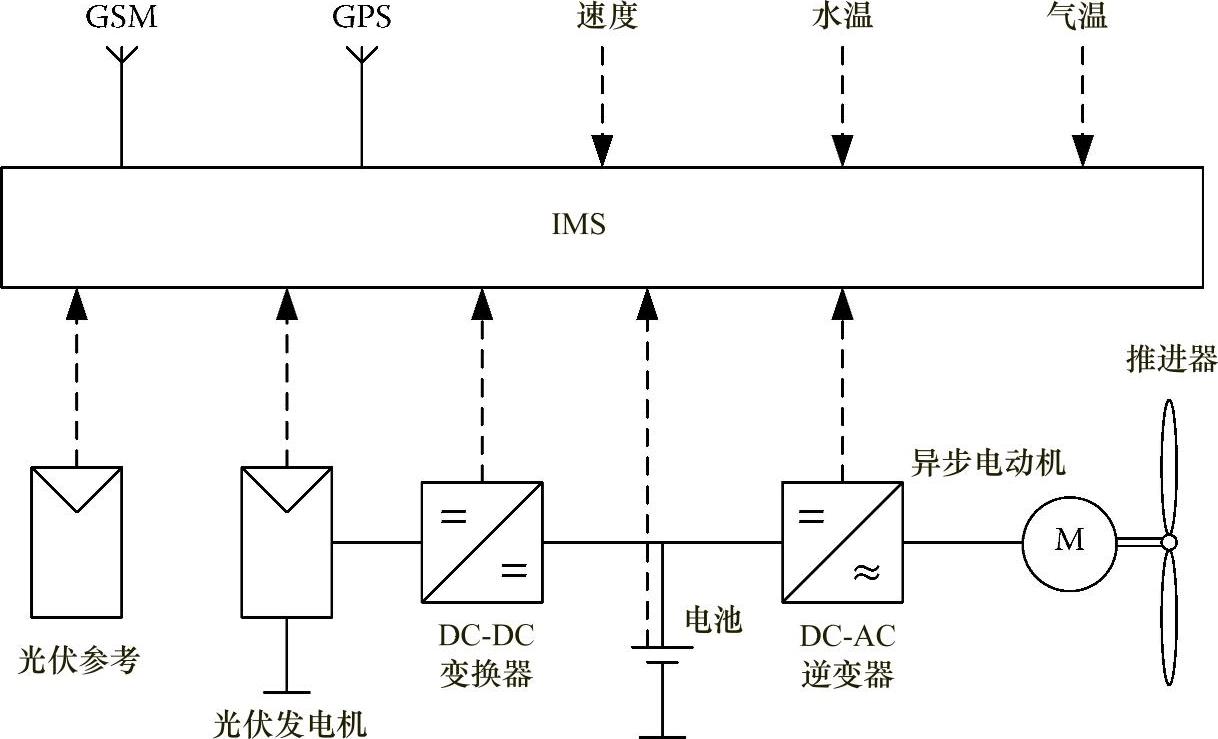
图1.107 能源链和IMS的额外输入结构图
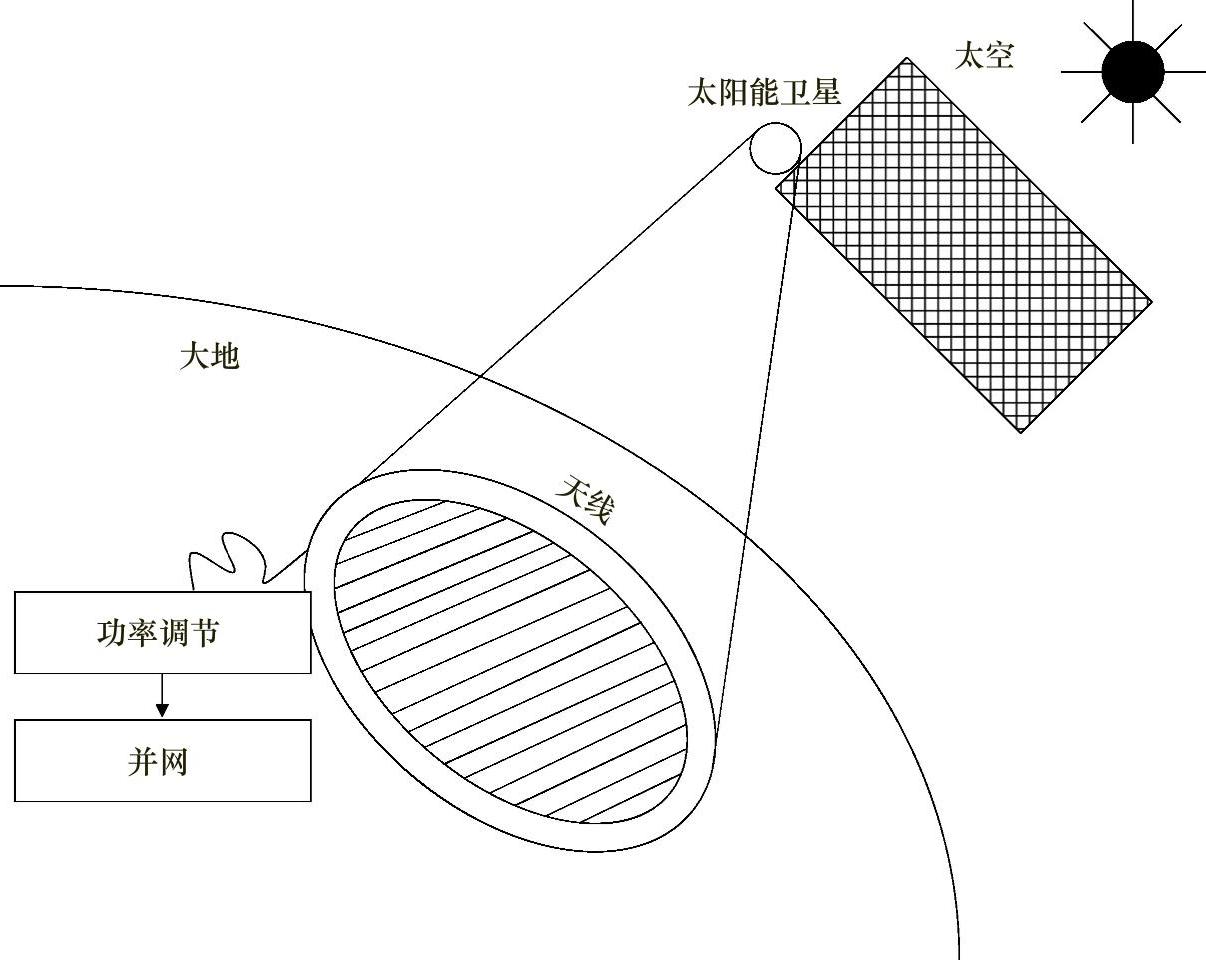
图1.108 太阳能卫星系统的概念
只有在春分和秋分时,这些卫星才会穿过遮盖阴影区。因此,在一年当中,它们只有不到1%的时间处于阴影区。太阳能电池将太阳光转换为电能,然后再将电能转换为射频能量并通过卫星上的一个天线来传输,聚集于地球上的一个接收站点。接收天线再将其重新转换为电能,然后输入输电网络。图1.108所示为太阳能卫星能源系统的概念示意图。
每颗卫星都有一个与大型地面电厂等效的电流容量输出。将太阳能电池放置于太空而不是地球的好处是它可以一天24h供能,而且卫星可用的太阳能总量要比地球上的可用总量多出4~5倍。试验表明,无线能量可以高效地传输到地球上。试验还表明,射频束的能量密度可以被限制在安全水平之内[114]。
1.9.4.2 充电式太阳能飞机:探路者
图1.109给出了探路者(Pathfinder)电力系统的系统级结构图。能量储存和回收系统使用了燃料电池/电解槽。该系统可为飞机发动机和夜间飞行持续提供推进能量[115]。这种燃料电池/电解系统比充电电池技术更为适用,因为前者的能量转换效率更高,可循环能力更强。
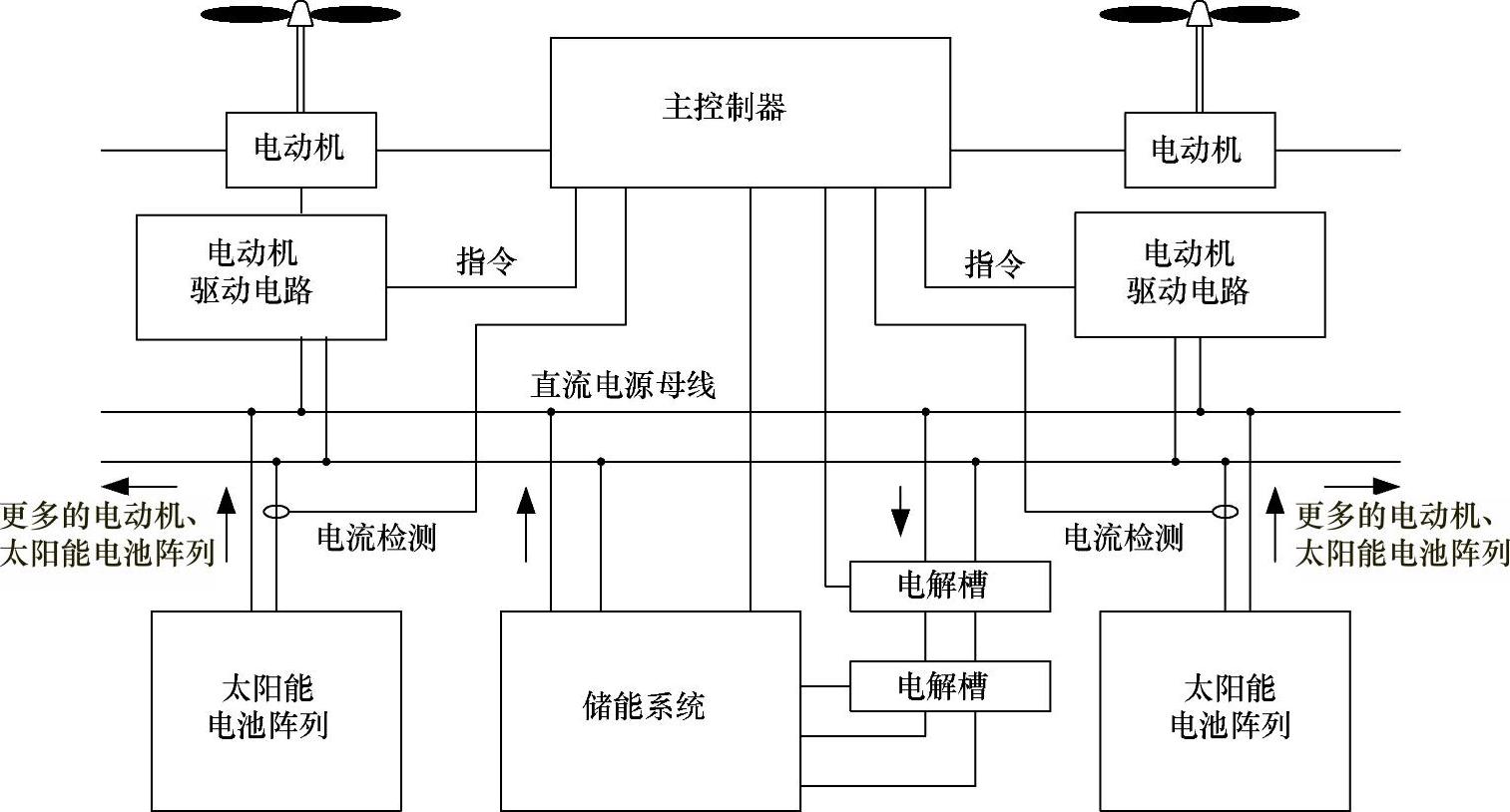
图1.109 充电式太阳能飞机推进系统原理图
1.9.4.3 太阳能飞行器
在图1.110a和b中给出的太阳能飞行器动力系统包括机翼上的太阳能电池、储能系统、能源管理电子设备、无刷直流电动机和推进器等[116]。
由图1.110b可以看出,太阳能阵列都是通过MPPT DC-DC变换器连接到主直流母线上,电池通过主直流母线充电。这架飞行器的推进系统包括电动机驱动系统,它由直流母线通过DC-AC逆变器供电。主直流母线还能够满足对辅助功率的需求。(https://www.xing528.com)
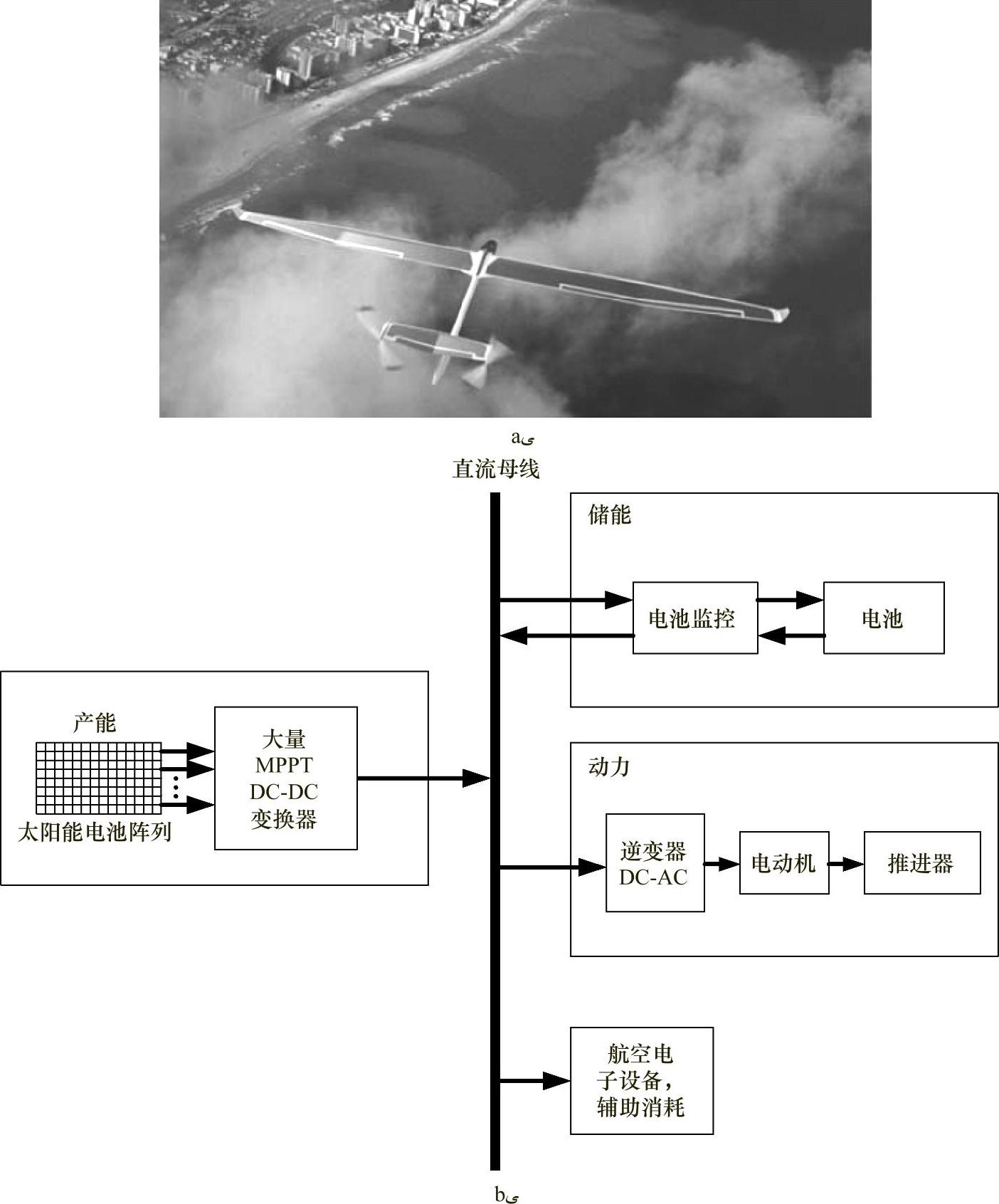
图1.110 以太阳能为动力的飞机和飞机传动系 (改编自Y.Perriard、P.Ragot和M.Markovic,IEEE International Conference on Electric Machines and Drives,1459~1465页,2005年5月)
a)以太阳能为动力的飞机 b)飞机传动系
1.9.4.4 太阳能飞机
飞机电力系统(动力系)的总体方案如图1.111所示[117]。它是由安装在机翼上的太阳能电池、用于将太阳能量采集最大化的MPPT装置、用于夜间飞行储能的电池、DC-AC逆变器、驱动电动机的电力管理以及电动机和推进器组成。
在图1.111给出的结构中,太阳能电池组件与独立的MPPT DC-DC变换器相连,因为每个组件由于位置差异可能有不同的MPP,因此需要使用两个主直流母线用于每个装有两个其他电池组的机翼。两个电动机驱动每个机翼的推进器,这些电动机由连接到直流母线的DC-AC逆变器供电。能源管理的主要用处是提高动力系子组件的效率。该系统效率在很大程度上取决于不同的功能模式:在低空平飞、爬升以及在高空平飞。
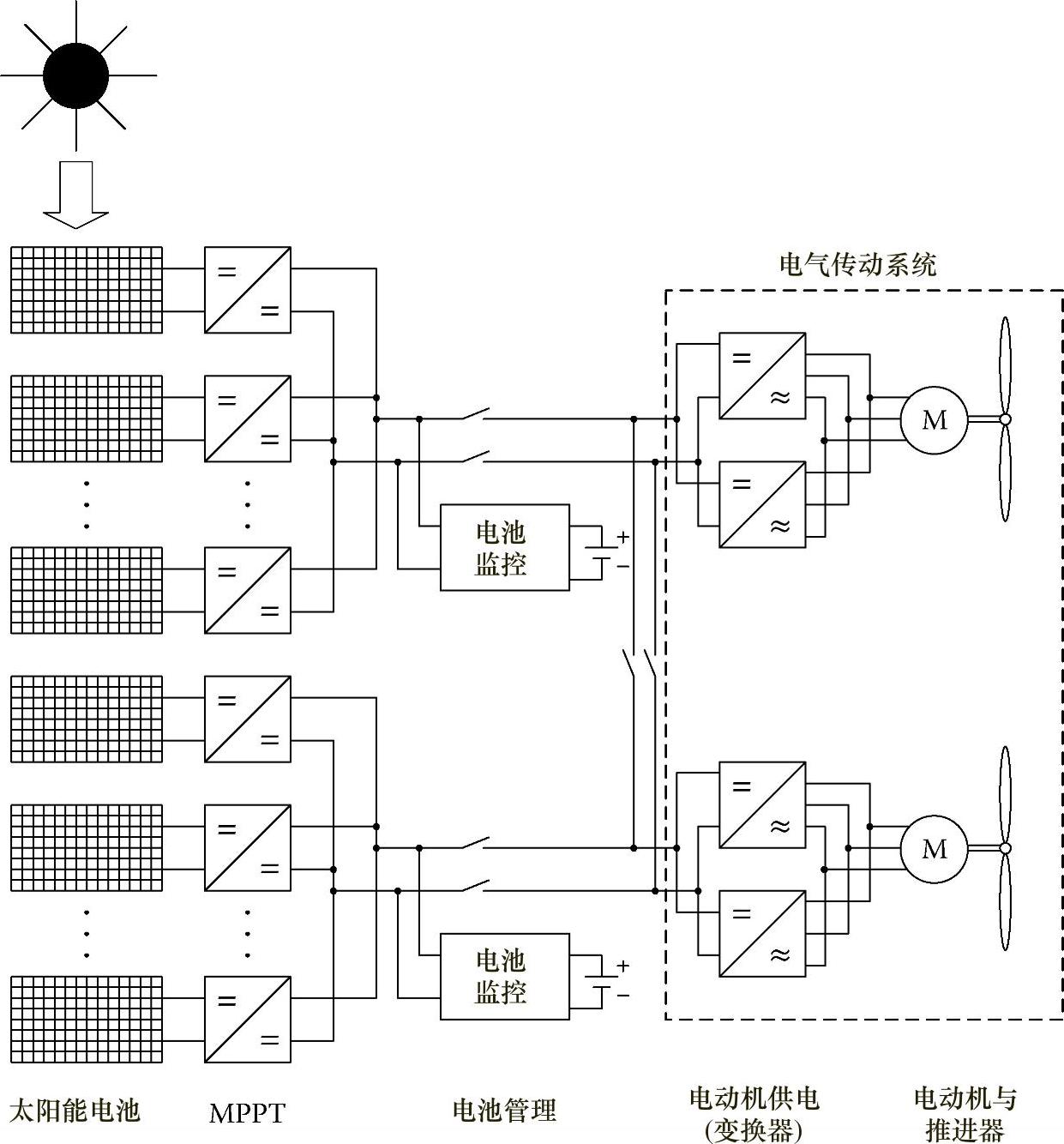
图1.111 前述飞机的电气系统
1.9.4.5 太阳能供电无人机
图1.112所示的以太阳能为动力的无人驾驶飞行器(即无人机,UAV),是太阳能的另一种空间应用。在这个概念中,无人机在一年中的哪一天(日期)和一天中的哪个时间段飞行,以及在哪个纬度飞行,决定了可供能量储存系统使用的充电/放电时间,以及可用于推进的太阳能发电总量。如果每个机翼面积上的可用太阳能越少,就越应该考虑使用较大的机翼面积以产生足够的电能来推进机身和能源储存、燃料电池和电解槽单元的质量。在前述系统中,如果太阳能产生的电能超出了推进所需的能量,超出的电能就可以在电解槽中使用,产生氢气和氧气,以便将来在燃料电池中使用。当推进所需的电能大于太阳能阵列产生的电能时,也可以使用燃料电池来为驱动提供能量。来自太阳能阵列的能量是用于推进还是用于电解槽,这要取决于电源管理策略。此外,燃料电池的能量也可以用于能量平衡。
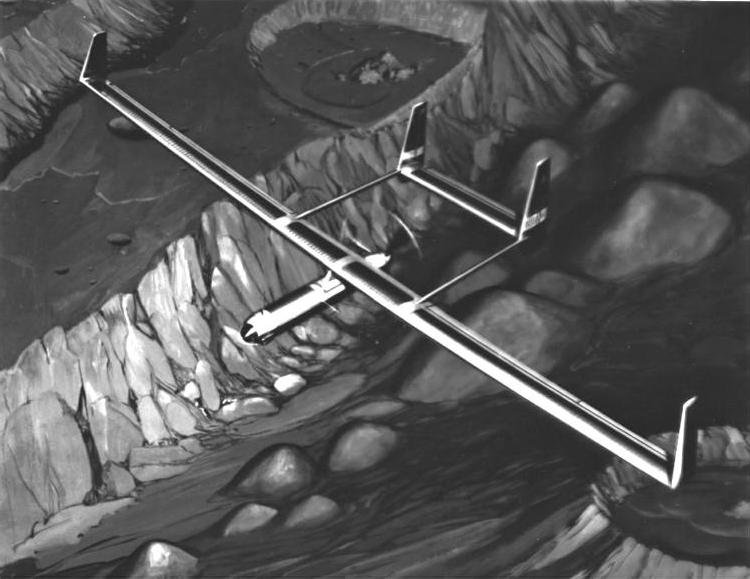
图1.112 以太阳能为动力的无人机 (改编自K.C.Reinhardt等人Proceedings of the IECEC 96 Energy Conversion Engineering Conference,卷1,41~46页,1996年8月)
无人机动力和推进系统如图1.113所示。
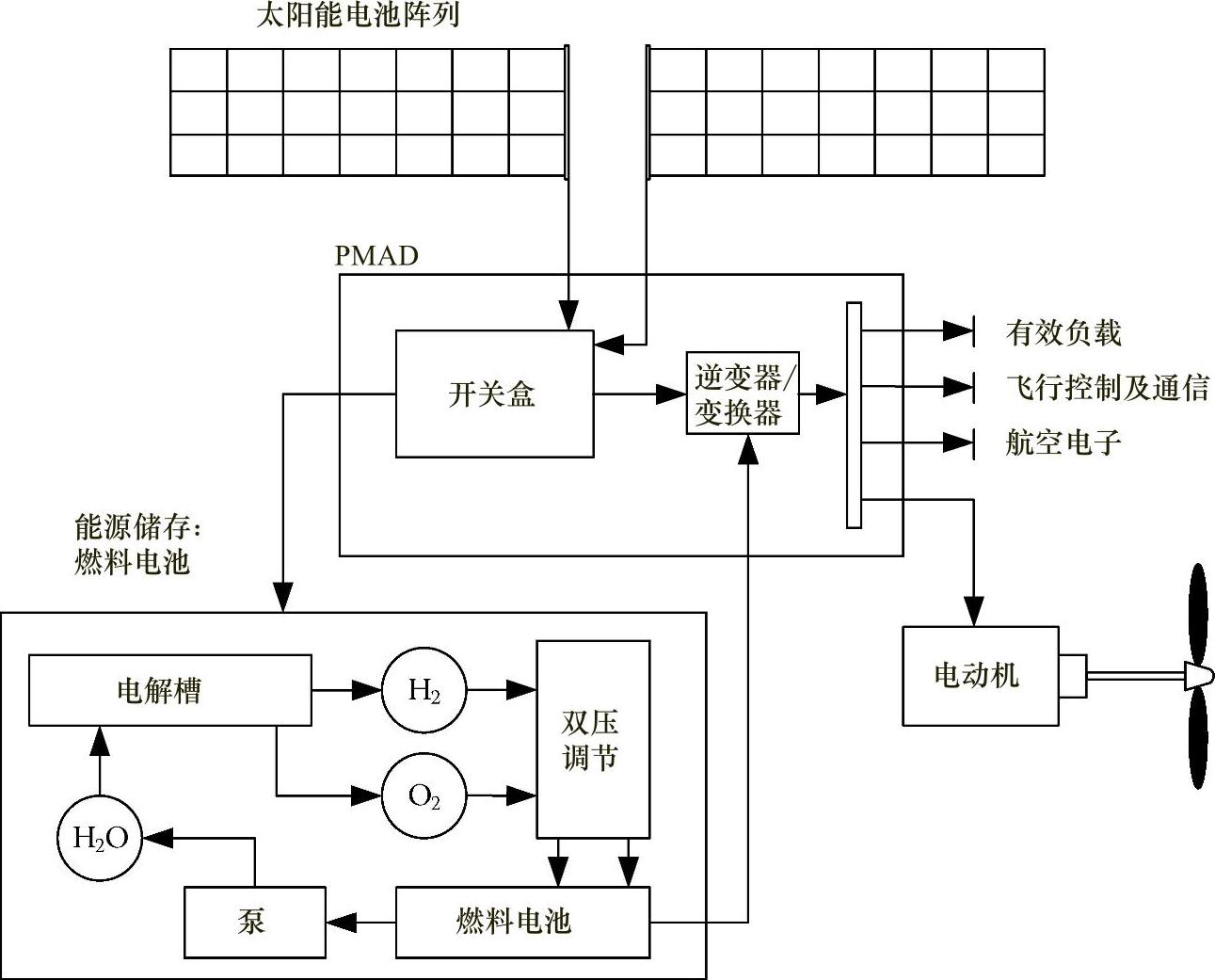
图1.113 太阳能无人机的动力系统
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。