



增量电导技术是光伏系统中最常用的MPPT[21,27-29]。该技术基于这样一个事实:瞬时电导值I/V和增量电导值ΔI/ΔV之和在MPP处为零,MPP的右侧为负,左侧为正。图1.17所示为增量电导技术的算法流程。
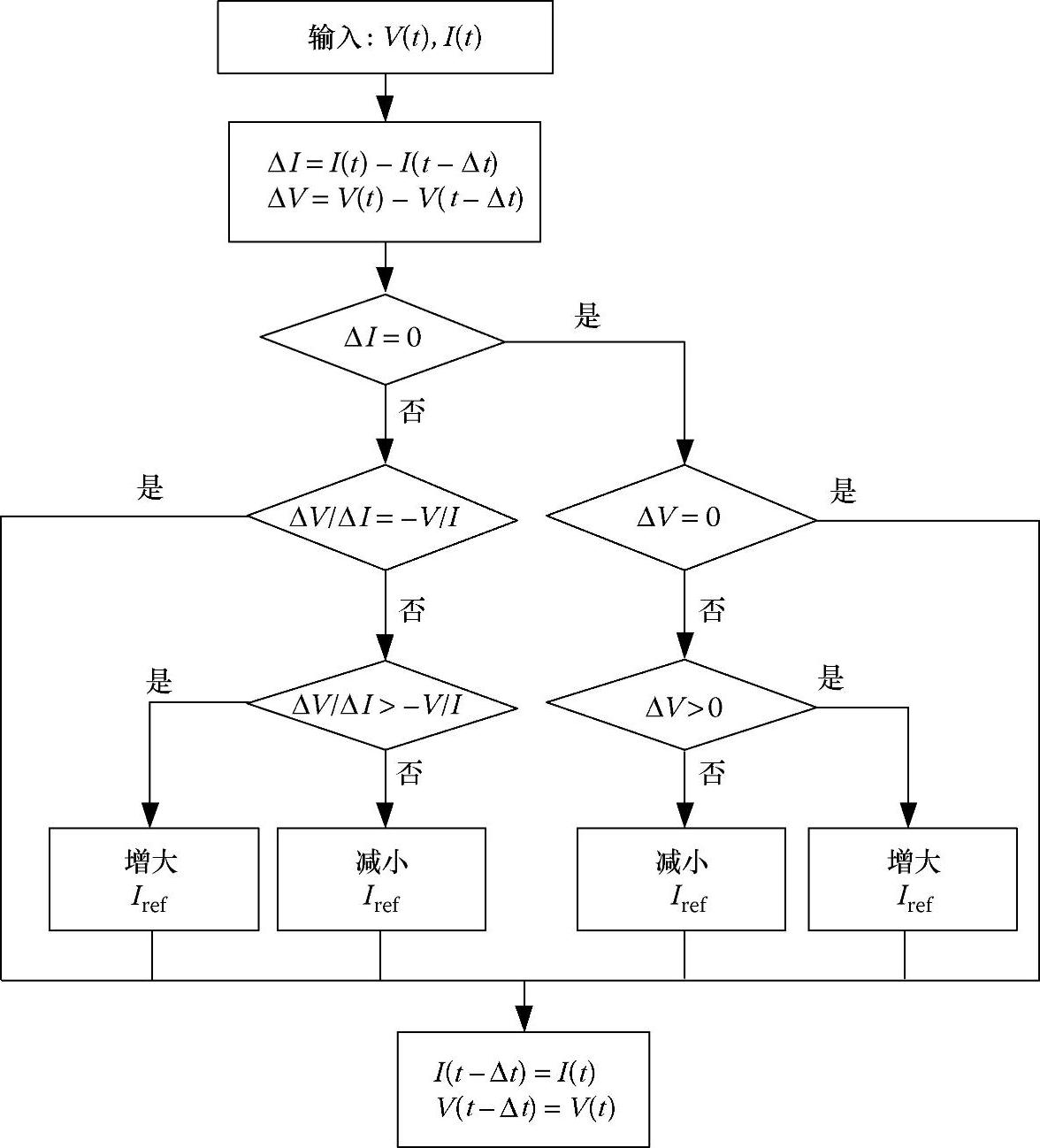
图1.17 增量电导算法流程
如果电流和电压的变化同时为零,参考电流就无需增减。如果电流没有变化而电压变化为正,参考电流就应增大。同样,如果电流没有变化而电压变化为负,参考电流就应减小。如果电流变化为零,而ΔV/ΔI=-V/I,光伏系统工作在MPP上。如果ΔV/ΔI≠-V/I而且ΔV/ΔI>-V/I,参考电流应该减小。不过,如果ΔV/ΔI≠-V/I而且ΔV/ΔI<-V/I,参考电流就应该增大,以跟踪MPP。
实际上,由于噪声和误差的因素,要满足ΔI/ΔV=-I/V条件可能会非常困难[30]。因此,这种情况可以通过下式的良好逼近得到满足:

式中 ε——一个极小的正值。
基于这种算法,工作点要么是位于BC间隔之间,要么是在AB和CD之间振荡,如图1.18所示。
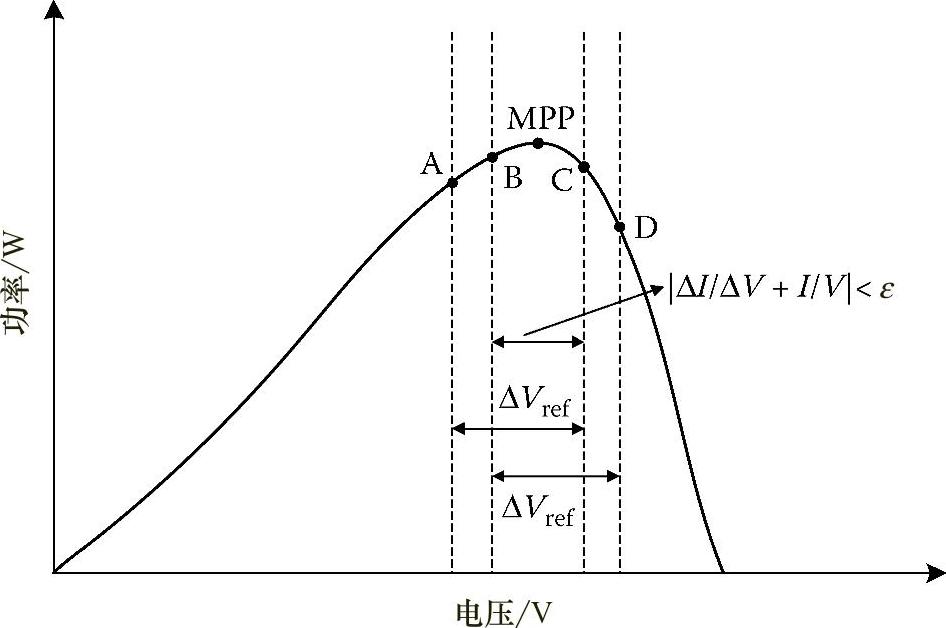
图1.18 基于增量电导的MPPT的工作点轨迹(https://www.xing528.com)
选择步长(ΔVref)是精确稳定跟踪和动态响应之间的折中方案,如图1.18所示。如果选择更大的步长来实现更快的动态响应,那么跟踪精度就会降低,同时跟踪点也会在MPP左右振荡。另一方面,如果选择了较小的步长,那么跟踪精度就会提高。与此同时,需要达到MPP的持续时间也将增长[31]。
光伏阵列的归一化I-V、P-V和P-V特性的绝对导数如图1.19所示。
从这些特性可以看出,当达到MPP时,|dP/dV|下降,当工作点离开MPP时,|dP/dV|则会增大。这种关系可表示为

为了得到工作MPP,应计算dP/dV:

dP/dV可以通过仅测量光伏阵列的增量电导和瞬时电导获得,即ΔI/ΔV和I/V[27]。
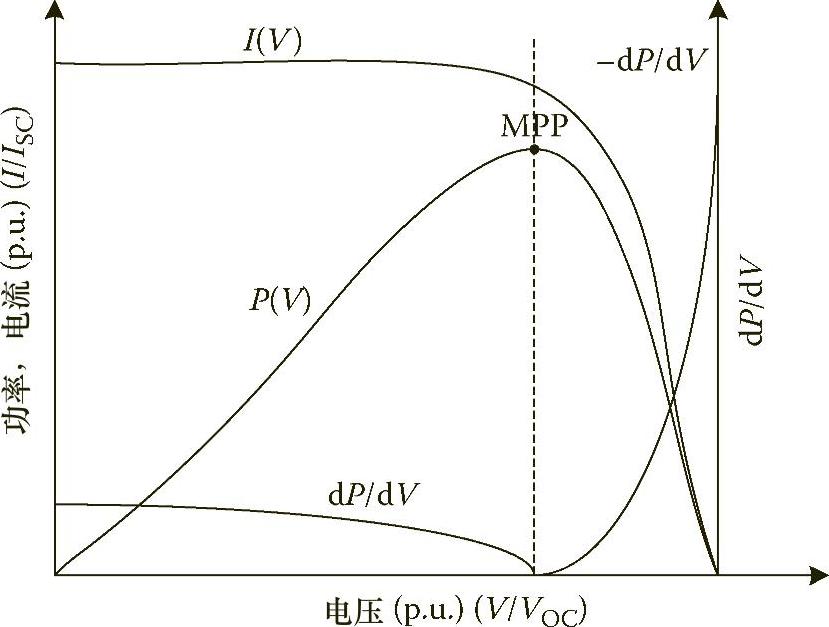
图1.19 光伏阵列的归一化I-V、P-V和|dP/dV|特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。