



太阳的位置一年四季从早到晚总在不停地改变。太阳跟踪器是一种用于太阳能光伏板定向的装置,它将太阳反射镜或者透镜对准太阳。太阳能光伏板需要较高的精确度,以确保将太阳光正好精确地聚集在光伏设备上。太阳能跟踪系统通过改善自身在上午和下午的性能,从而大大地提高系统产生的电量。对于与电网并网的光伏系统来说,下午的优良表现尤为重要,因为此时产生的电能将满足夏季的峰值功率需求。追求在有限时间内达到性能最优的固定系统,它的年度发电量相对较低,因为其太阳能光伏板是固定的,无法通过运动来跟踪太阳。
低温太阳能热应用系统通常不会使用跟踪器。这是因为,与增加更多的采集器相比,跟踪系统更为昂贵。此外,在冬天还需要更加严格的太阳能方位角控制,它会影响到全年的系统平均容量。对于太阳能电力应用系统来说,跟踪器较之光伏系统的成本可以相对便宜一些。这使它们非常适用于高效率光伏板系统。从维护的角度来看,太阳能跟踪器需要进行年度或者季度检查和润滑。
跟踪太阳方位并调整光伏板位置的技术有好几种,最常用的太阳跟踪技术之一是利用光源角度和两个邻近的光敏二极管(根据其表面遮光板的阴影而产生)的差动电流之间的关系[23-25]。
图1.13给出了基于太阳的光源角与两个光敏二极管差动电流之间关系的太阳跟踪系统的结构。当光源移位时,遮光板将会在光敏二极管上产生阴影。其结果是,一个光敏二极管会比另一个更亮一些。光照多的光敏二极管就会比另一个产生更多的电子。因此,随着偏差角的增大,产生的电流之差也会变得更大。该系统能够根据两者电流之差来实现定位,使之直接朝向太阳。
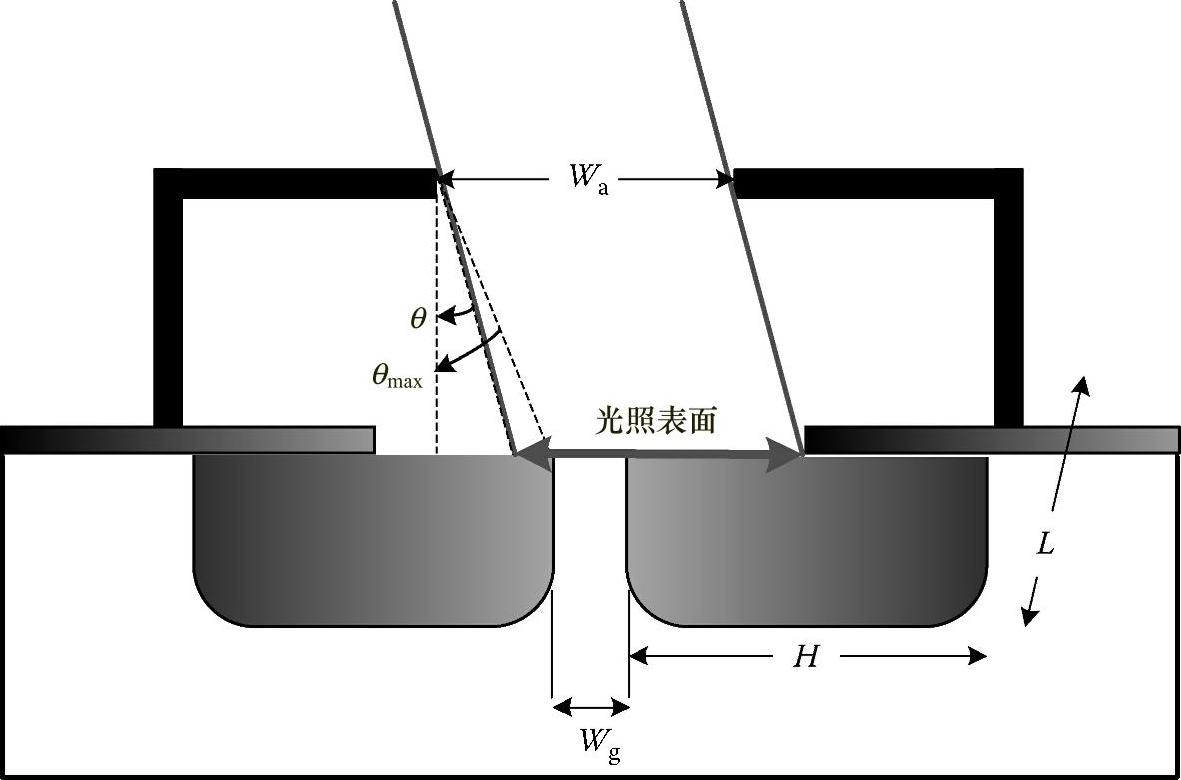
图1.13 基于光源角使用两个光敏二极管的太阳跟踪系统结构
传感器由“x”和“y”轴的两个组件组成,如图1.14所示。传感器组件还包括两个光敏二极管、金属连接器、电阻器、电阻保护器以及一个遮光板等。图1.14给出了传感器的x轴和y轴组件的俯视图。
动态范围是太阳跟踪系统在阈值限制里之内响应参数。两个组件之间的距离不必限制动态范围。如果动态范围增大,电流差的灵敏度就会降低。因此,在动态范围和灵敏度之间有一个平衡。作为一种解决方案,可以使用两个平行的传感器来达到最佳的灵敏度和高动态范围。
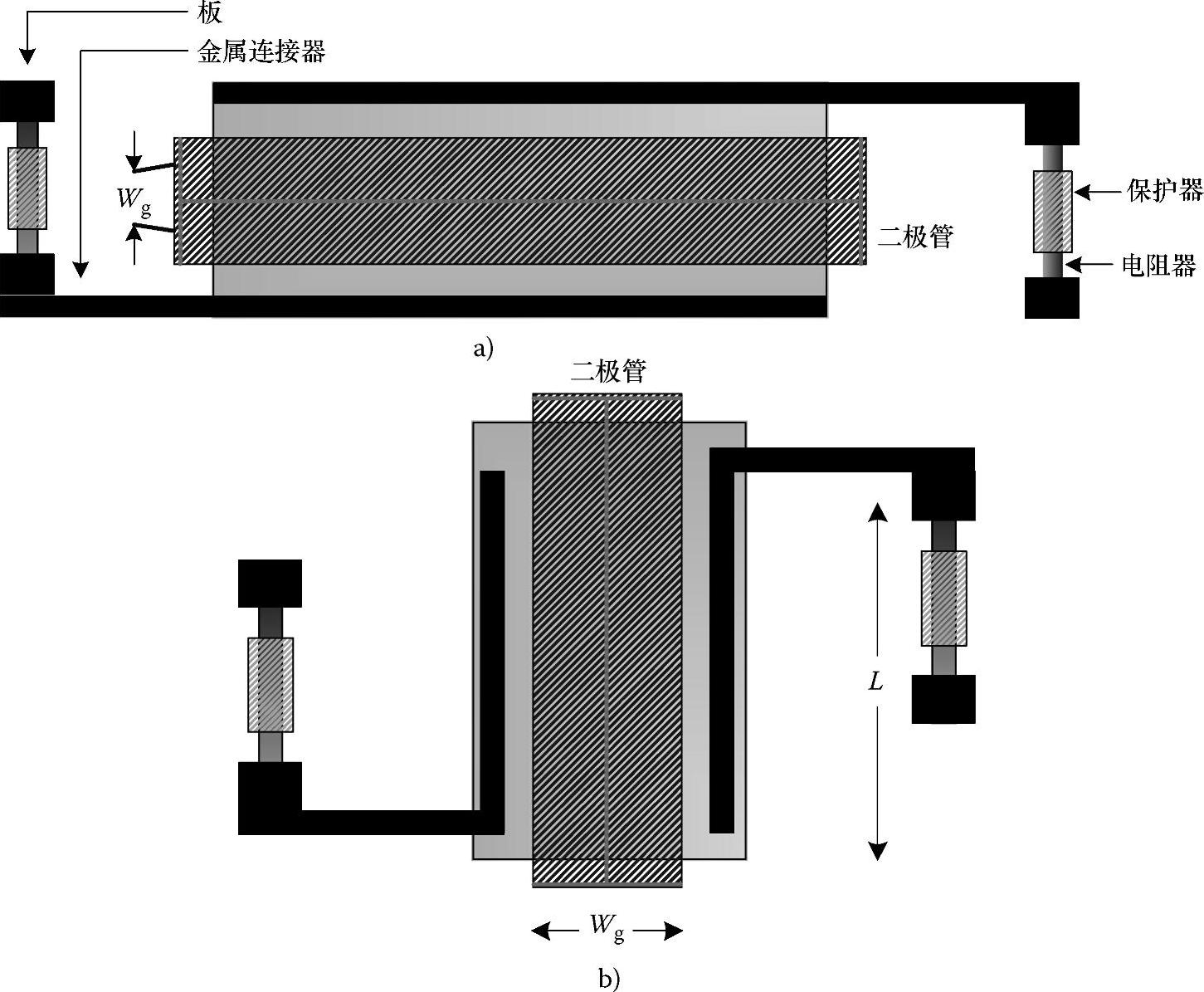
图1.14 x轴传感器组件结构与y轴传感器组件结构
a)x轴传感器组件结构 b)y轴传感器组件结构
耦合传感器产生的电流取决于光照面积。如果一个光敏二极管比另一个二极管受到的光照更强,这两个光敏二极管产生的电流便有差异。如果将传感器放置在一个相对于光源的预设角度,这将会导致图1.14中所示的两个光敏二极管产生不同的电流。通过这种方式就可以计算出系统的移位。系统使用此差分信号来定位光伏板以对准光源[23,24]。
两个光敏二极管之间有一个间距,这对于避免载流子的复合来说非常必要。光伏效应可由式(1.17)来描述:

式中 A——光照面积;
NF(λ)——单位面积的入射光子数;
SR(λ)——波长为λ的入射光子数产生的载流子数;
R——半导体表面的光子反射[23,24]。
每个光敏二极管光照面积的计算公式为

式中 Wa——遮光板缝隙的宽度;
Wg——光敏二极管之间的缝隙;
H——传感器宽度;
θ——偏差角;
L——传感器深度。
两个电流之间的差值为(https://www.xing528.com)

式中 I1和I2——相应的光敏二极管电流;
JL——光敏二极管各表面产生的电流密度。
移位偏差可由下式计算而得:

角度取决于辐照度和电流密度。通过增大电流,可以将这个变量标准化,而且它对电流密度的依赖可以忽略不计:
I1+I2=L(Wa-Wg)JL (1.21)
因此,结合式(1.20)和式(1.21),可以求得偏差角为

根据式(1.22),可以增大H/(Wa-Wg)比值,以提高传感器的灵敏度。
如果一个光敏二极管根本未受光照,这时将出现最大传感器角度值,因为其中一个二极管产生的电流为零。当没有光照时,光电流为零,因而式(1.22)可改写为

可以调节太阳传感器的输出,以使其与微控制器的电压范围相适应。微控制器生成光敏二极管的反向偏压,以此来定位光伏板使电流差最小化。通常来说,为了用于控制,电流信号应被转换为电压信号。图1.15所示的流程给出了太阳跟踪系统的传感器输出估计与电动机控制[23,24]。
对于式(1.22)的应用,可以分别使用微分电路和加法器电路来实现传感器输出的增减。参考角(θ)由微控制器获得,而电动机的实际位置也会被反馈给微控制器。电动机的参考位置可以通过向电动机驱动器提供控制信号来得到。这两个电动机和驱动电路是由同一个电源供电的。
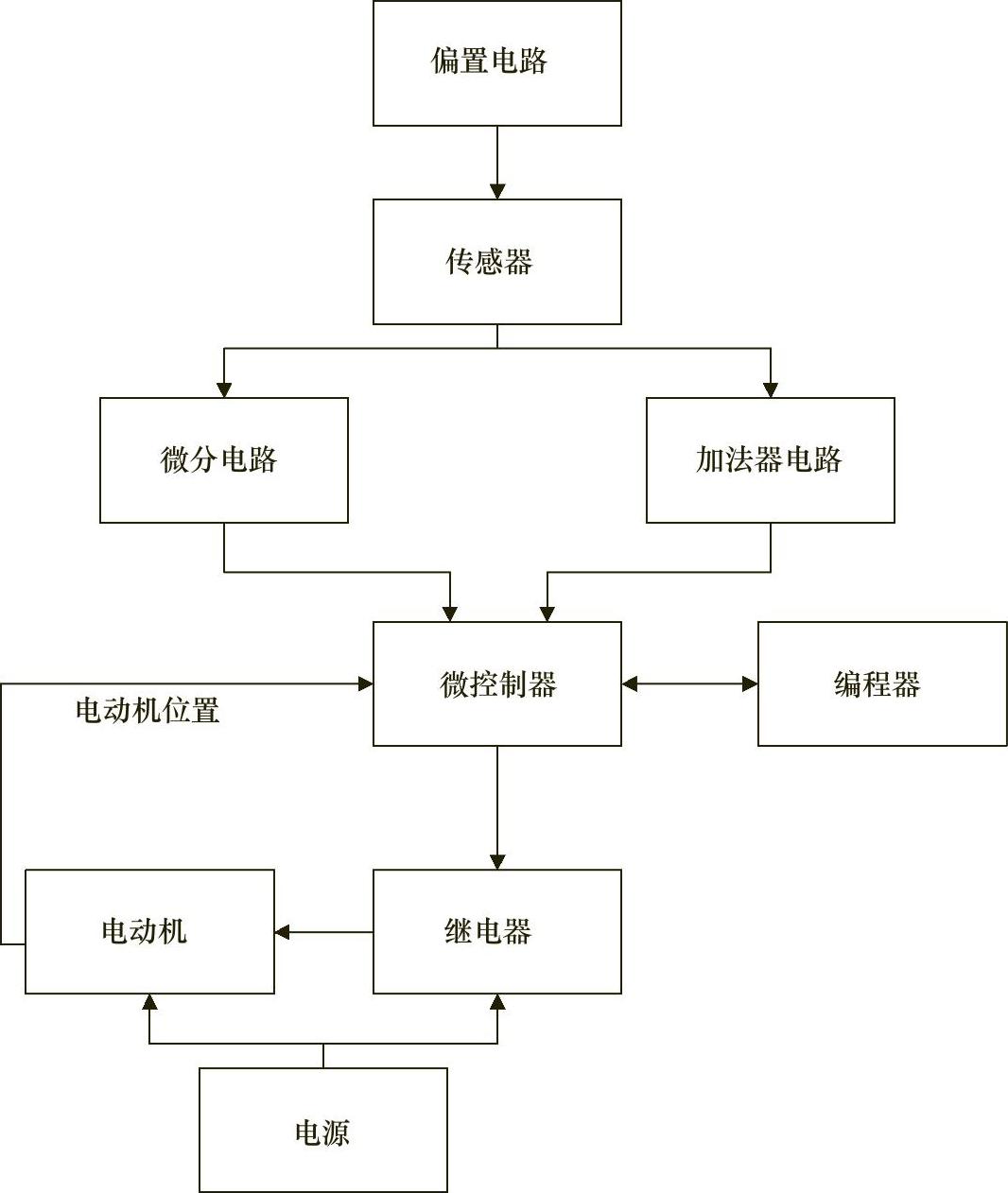
图1.15 太阳跟踪器的传感器输出估计与电动机控制流程
不同的信号数据均与最大的阈值进行比较。该值越高,太阳与设定的角度偏差越大。因此,控制电动机驱动器的微控制器应采取与之相反的运动。
传感器产生的电流之差可以形成一个差分信号。太阳和云层的运动都会影响到输出。云层的存在可能会导致微控制器误判太阳的运动方向,这样就会引起平台向错误的方向运动,并带来不必要的能源耗费。这些故障可以使用智能控制技术来消除。
电流的加法和微分用来识别真实状态,即太阳或者云层的运动。为了检测云层的出现情况,电流的加法被用作参数,而电流的微分则随着太阳的运动而变化。电流的增加不会受到太阳位置变化的影响。电流的加法因云层、日落或者日出等情况而异。云层存在时,电流加法的导数(The derivative of current addition)要高于日落或者日出的情况。因此,太阳跟踪控制器算法应该考虑电流微分、电流加法、电流估计值斜率以及电流的变化值等[23]。
太阳搜索或者太阳跟踪的确定需要一种算法。太阳跟踪是正常的运行状态,而在云层出现时则需要使用太阳搜索。该算法的流程图包括若干状态机,如图1.16所示。微控制器被初始化,以访问先前记录的数据表来决定运行太阳搜索、太阳跟踪或者云算法。辐照数据表含有典型晴天的信息。根据这些数据计算而得的辐照用于确定是否有云在传感器上面通过。存储的信息使得在有云的情况下可以再现系统的运动。
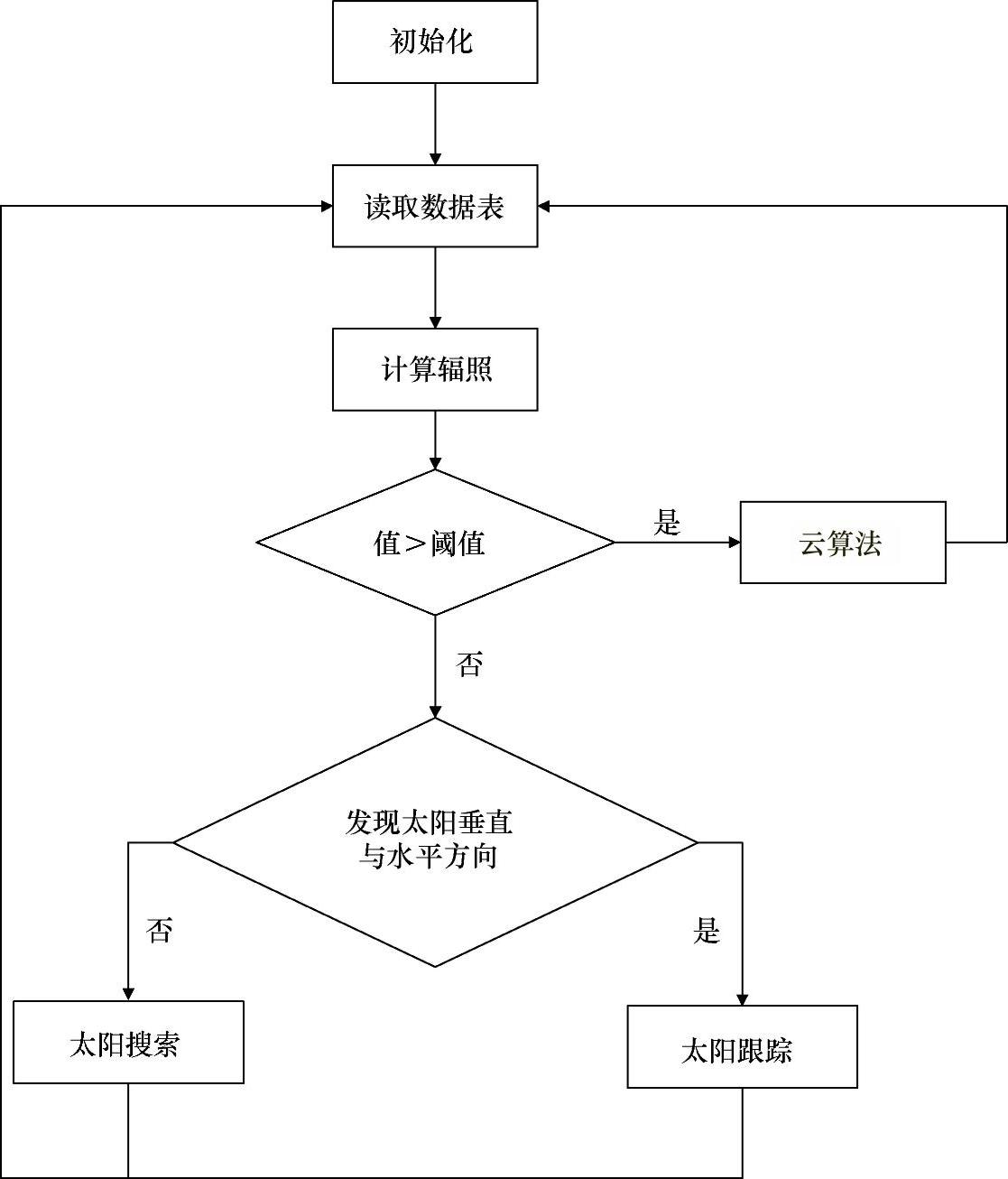
图1.16 太阳跟踪算法
太阳搜索或者跟踪状态是辐照的函数。在良好的气象条件下,该系统将工作在“太阳跟踪”状态。这种状态负责存储跟踪运动的信息。该系统运动可由微控制器提供,该微控制器提供适当的开关信号来驱动电动机,以到达参考电动机的位置。
如果检测到云层,相应的状态将是“云算法”。然后,该运动可以通过在“太阳跟踪”状态中存储的信息进行复制。该系统处于这种状态,一直持续到辐照返回到另一个值为止。云层预计历时约15min。当这个时间段结束后,该系统将寻找太阳和最大的太阳辐照值。这种时间上的限制用于根据近似值来实现误差最小化。太阳的运动使用方位角和仰角来表征。一天的不同时间,方位角或仰角的变化规律也不同。例如,在上午,仰角急剧变化,而方位角几乎保持不变。主要状态的选择是基于附加电压,因为辐照是根据这些数据计算而来的。一旦选定了状态,基本的变量就是差分电压。要将这些数据采样,以便知道在“太阳跟踪”状态下的太阳运动。在有云层的情况下,如果有部分阳光可用,“太阳搜索”状态负责将传感器定位至对准太阳。这一行动在特定条件(例如,在黎明时分)下是必要的,并在“云算法”状态之后确定传感器的朝向。在这种状态下,该平台的运动是双向的,以防止系统发生故障[23]。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。