



风力发电机中的许多控制系统都利用模拟控制和反馈传感器来实现正常运行。反馈控制也叫作闭环控制,图5-28画出了一个闭环控制系统原理图。如果与风力机中的实际应用例如偏航控制结合起来,就可以理解图中各个部分的作用。从图中可以看出,系统受设定值(SP)信号触发,SP是一个对应于期望得到的目标的期望值。例如,如果期望偏航角度被调整为东90°,SP值就应该设置为90°。
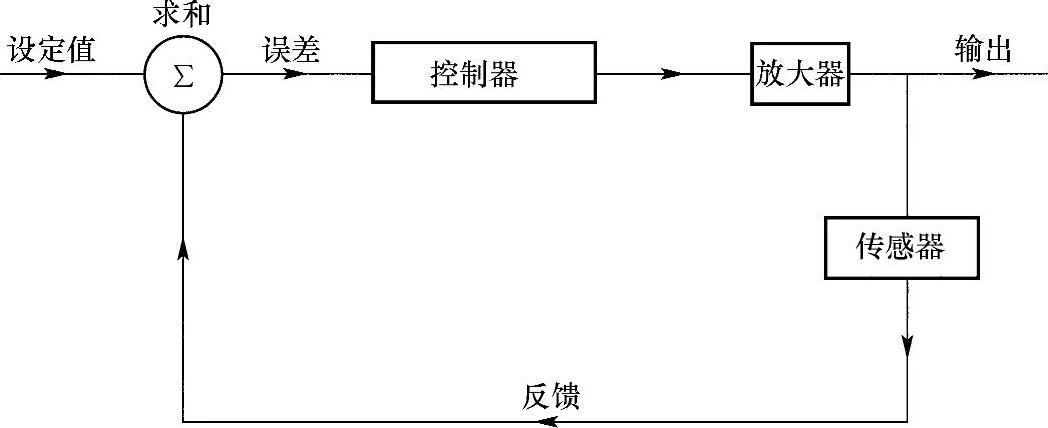
图5-28 包括设定值、过程变量、误差、控制器和输出的闭环(反馈)控制系统原理图
控制系统的下一个要素为过程变量(PV),它来自指示动力机舱方向的传感器。例如,在控制机舱方向的系统中,PV信号来自于闭环系统的方向传感器,PV也叫作反馈信号,它是通过传感器测量到的机舱的实时方位值。由于传感器的检测是一个持续的过程,所以PV随着机舱方向的改变而改变。
加法器在控制系统中实现SP和PV的比较,在数学运算角度即由SP值去减PV值。例如,如果SP值是90°,而PV信号表示的实际方向是80°,我们可以得到差就是10°,图中,代数和用希腊字母Σ表示。
SP和PV间的差被称为误差,误差是代表机舱期望方位的SP与代表机舱实际位置的PV之间的差距。误差信号和PV信号都用百分比来衡量。当SP点的测量值大于PV时,误差为正数;当SP小于PV时,误差是负数。控制器通过改变输出来调整机舱方向。举例来说,系统的输出是通过一个液压马达来实现的,它可以驱动转轴并带动机舱旋转以改变方向,使叶片迎风。有一点必须记住:控制器总是试图调整误差幅值从而使得误差尽可能小,尽可能地使PV点接近SP点。
图5-29说明了偏航闭环控制系统的原理,图中控制系统的各个基本要素均被列出。该控制器采用闭环控制结构,当闭环控制程序被植入到PLC中后,SP就成为机舱需要移到的新位置点。新方向可以通过一个能确定最佳方向的计算算法得出。该系统的传感器是一个类似指南针的方向传感器,检测的信号即为PV。进行信号反馈后,SP和PV相比较进行求和运算,这一切都是在控制器内进行的。(https://www.xing528.com)
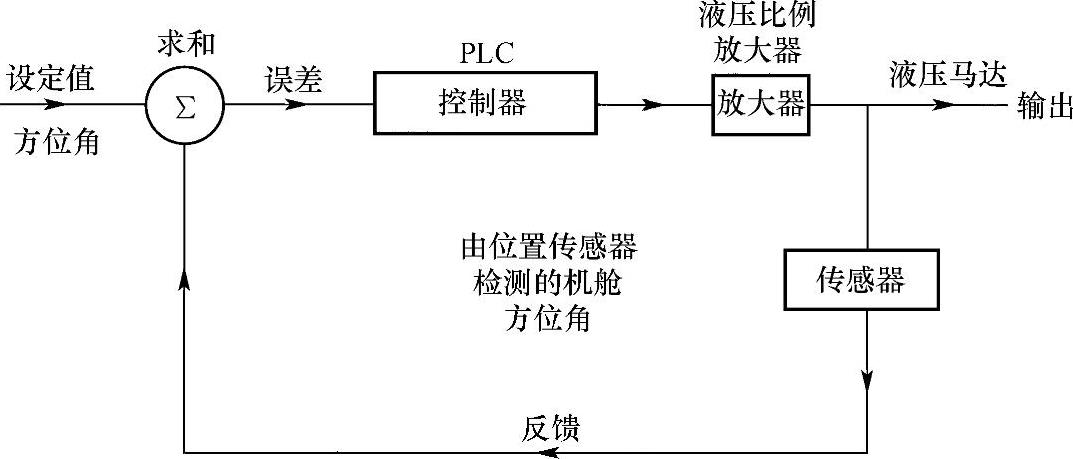
图5-29 偏航闭环控制系统,该系统中由液压马达控制机舱偏航环的旋转速度和方向,而液压马达的液压流量控制则通过液压阀实现
经过计算后,控制器会向放大器送出一个输出信号,放大器控制液压马达中的液压油流量,从而控制马达带动机舱改变方向。该系统的放大器是一个液压比例放大器,它可以利用0~10V的直流电压信号控制液压电磁阀线圈中的电流。控制器向放大器送出电压信号作为输出信号,放大器通过改变液压电磁阀的位置来控制液压马达转动的方向和速度。
图5-29所示的控制系统之所以为“闭环”,原因是类似于指南针的方向传感器检测机舱方位角度后得到PV并将其反馈到加法器,在加法器中PV信号和SP信号作比较。由于传感器信号要反馈至加法器,所以传感信号也叫作反馈信号。当反馈存在时,信号流通路径构成闭环,因此相应的控制系统则称作闭环系统。
如果系统被设置为没有运用反馈信号的手动模式,则该系统被称为开环系统。在大多数系统里,人们一般都利用自动/手动开关来控制PV信号,来决定它是否运用于反馈。在自动模式中,如果开关闭合,传感信号将被应用于反馈;在手动模式中,如果开关断开,传感信号则不用于反馈。自动/手动开关决定了系统运行于开环或是闭环模式。当系统运行于开环模式时,输出将由操作者手动调整。例如,如果检修人员在维护时,需要将机舱移动到某一个确定的方向,系统需要运行于手动模式,机舱可以被手动移动到指定的方向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。