



【摘要】:单控件五杆机构的综合模型可以采用不同的综合方法。一般采用先四杆后五杆的两步综合法和Ⅱ级杆组综合法。该四杆机构能在尽可能多的点位上最优近似地逼近给定运动。由于单控件五杆机构只有一个受控驱动系统,因此与双控件五杆机构相比,其成本低廉。但由于非是受控主动件的运动不能调整,且机构尺寸参数已经固定,只能实现某一特定的运动规律。
单控件五杆机构的综合模型可以采用不同的综合方法。一般采用先四杆后五杆的两步综合法和Ⅱ级杆组综合法。
如图9-22a所示,曲柄AB和滑块3是主动件,其中滑块3为受控主动件,要求该机构M点精确实现轨迹yi=f(xi) (i=1,2,…,n)。
1)两步综合法。先用最优综合的方法综合出一个起始四杆机构ABCD(去掉受控件3)。该四杆机构能在尽可能多的点位上最优近似地逼近给定运动。再在起始四杆机构的基础上,引进受控主动件(滑块3),并按照给定的M点的坐标值计算受控主动件的补偿位移s3(φ1i),从而精确实现任意给定运动。
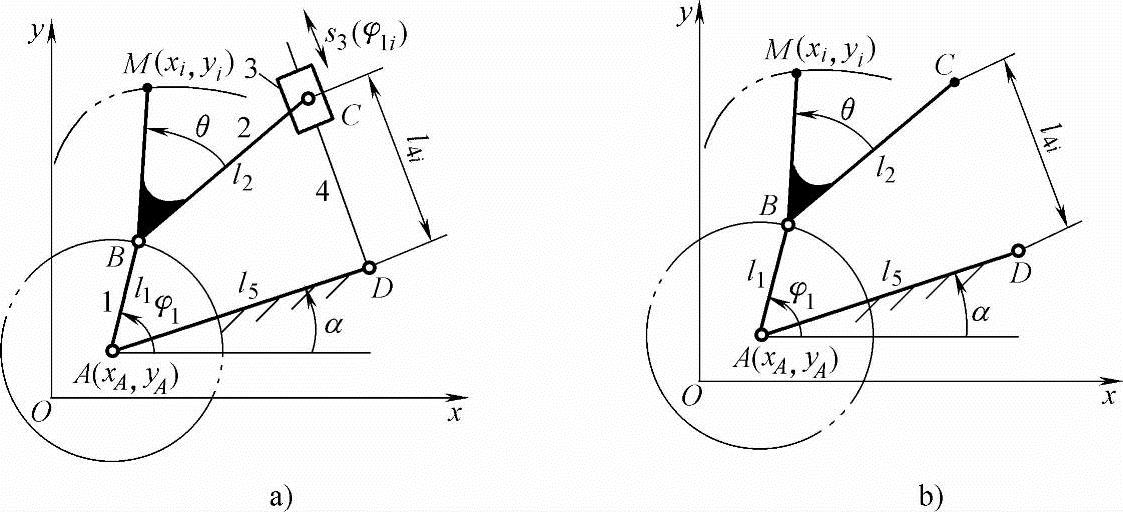
图9-22 单控件五杆机构综合模型(https://www.xing528.com)
a)单控件五杆机构 b)Ⅱ级杆组综合模型
2)Ⅱ级杆组综合法。设将构件3、4从机构中拆下,如图9-22b所示。将Ⅱ级杆组ABC上的转动副装于机架上的A点,使点M沿轨迹M(xi,yi)运动的同时,曲柄AB绕A点作圆周运动。此时C点到D点的距离l4i将随曲柄转动而发生变化。以l4i变化极小为目标进行机构优化,求出各尺寸参数及l4i的变动值Δl4i,受控主动件的补偿位移s3(φ1i)=Δl4i。
由于单控件五杆机构只有一个受控驱动系统,因此与双控件五杆机构相比,其成本低廉。但由于非是受控主动件的运动不能调整,且机构尺寸参数已经固定,只能实现某一特定的运动规律。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。