



如图9-12a所示为全铰链五杆机构,若分别将运动副E、C、D以移动副替代,则得到如图9-12b、c、d所示三种带有一个移动副的五杆机构。观察机构的运动不难发现,图9-12c、d所示机构的可动性与机构各尺寸的分配无关。现仅讨论图9-12b所示曲柄滑块五杆机构的可动性条件。需要分两个转动主动件和一个转动、一个移动主动件两种情况加以讨论。
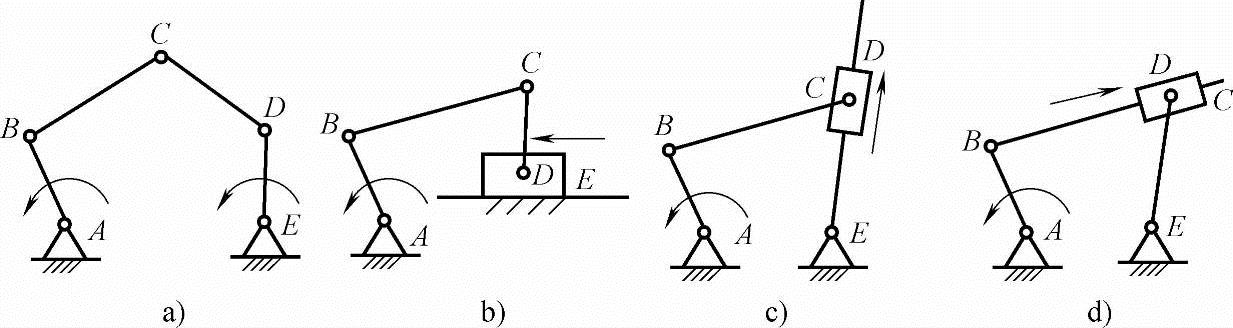
图9-12 带移动副的五杆机构
1.两个转动主动件
如图9-13a所示,以AB、DC两转动构件为主动件。两构件整周转动最难通过如图9-13b所示的机构位置,此时构件AB、BC和CD共线,由此得
b-a-c≥e若已确定b、e尺寸,则AB、CD为整周转动构件的尺寸条件为
a+c≤b-e (9-25)此即该机构两转动主动件时的机构可动性条件。
2.曲柄和滑块为主动件
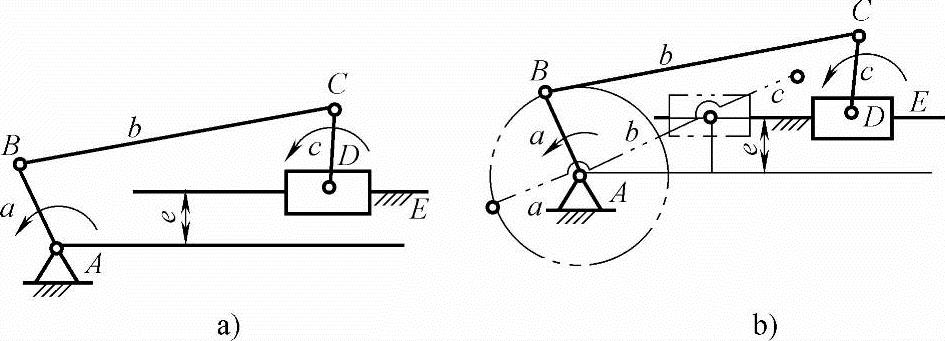
如图9-14a所示,以曲柄AB和滑块为主动件。滑块为主动件应满足在机构最难达到的两位置区间内完成其行程H。该两位置即滑块离A点的最远位置D2和最近位置D1,其位移分别为smax和smin。
由△AD2G2得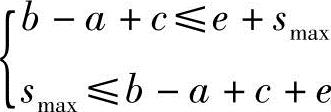
由△AD1G1得
 (https://www.xing528.com)
(https://www.xing528.com)
图9-13 带移动副的双曲柄五杆机构
将上式联立求解得c≤H/2+a,c≥H/2+a。故得c=H/2+a。
图9-14 带移动副的曲柄滑块五杆机构
如图9-14c所示,该机构满足AB为曲柄,则应满足滑块离支座A最近时,曲柄AB、杆BC、CD三杆共线的尺寸要求。此时有b-c-a≥e。
将c=H/2+a代入上式得
b≥H/2+2a+e
应该指出,当b=H/2+2a+e时,滑块离支座A的最近距离即偏距e,此时滑块在支座A的正上方,出现死点。所以为提高传力性能,一般按b>H/2+2a+e取值。由此得到曲柄和滑块为主动件时曲柄滑块五杆机构的可动性条件为

例9-7 如图9-14所示,已知a=100,e=130,H=380,为使两主动件按给定规律连续运动,尺寸b、c应按式(9-26)计算确定:

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。