



如图9-9所示为带一个滑块、带两个滑块和带三个滑块的具有代表性的Ⅲ级机构的典型结构。图9-9c所示带三个滑块的六杆Ⅲ级机构中有曲柄的条件与机构尺寸无关。现分别讨论图9-9a、b所示两种情况的机构有曲柄条件。
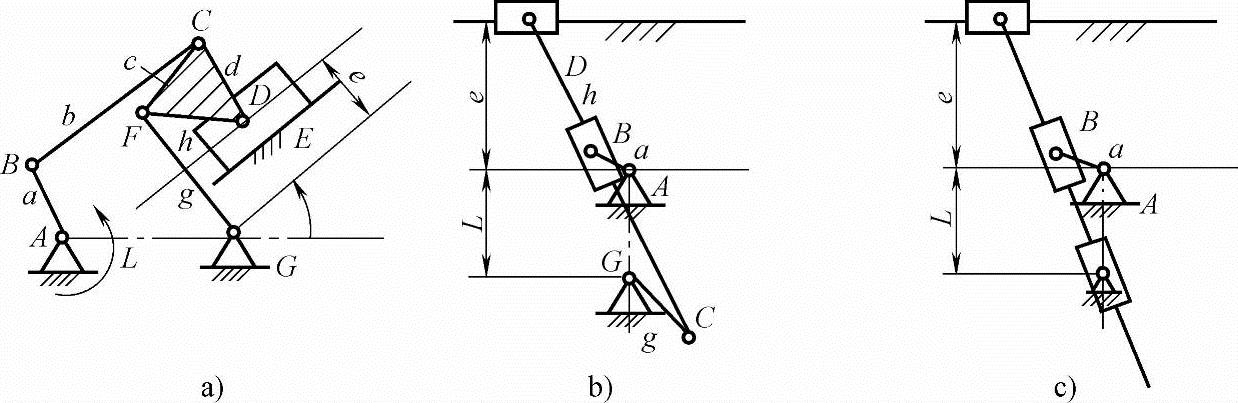
图9-9 Ⅲ级机构的典型结构
1.带一个滑块的六杆Ⅲ级机构的有曲柄条件
如图9-9a所示机构若将GF改为主动件则得到如图9-10a所示的六杆Ⅱ级机构。该六杆Ⅱ级机构由带滑块的四杆机构GFD与Ⅱ级杆组ABC构成(构件AB、BC用虚线画出)。
如图9-10b所示为四杆机构GFD的两个极限位置。杆长h(一般g>h)应满足
h≤g-e (9-21)
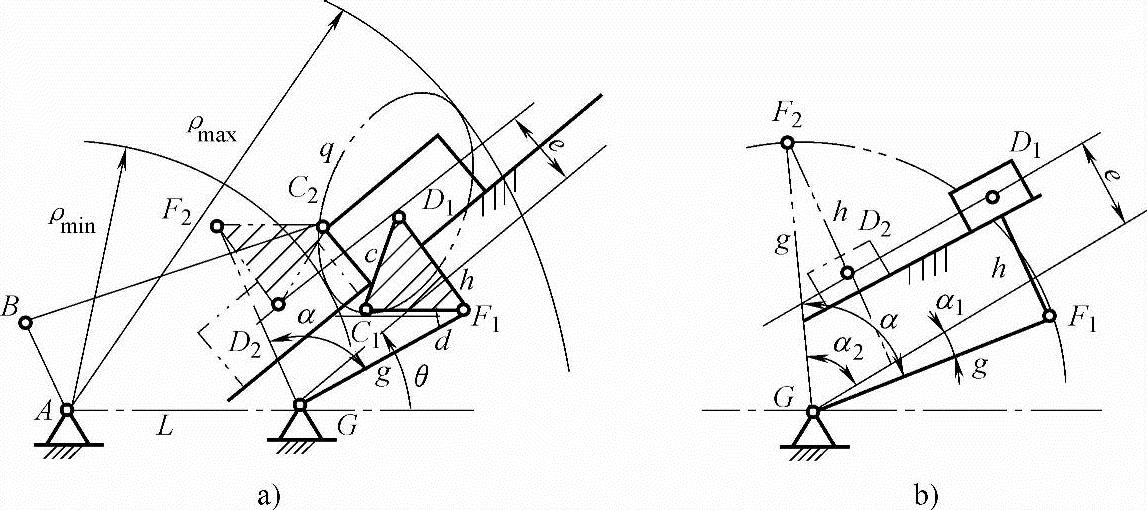
图9-10 一个滑块的六杆Ⅱ级机构
构件GF的极限摆角α=α1+α2=arcsin[(h-e)/g]+arcsin[(h+e)/g],对四杆机构GFD进行运动分析求得点C的轨迹q。最后计算出支座A距该轨迹最远、最近距离 和
和 。则原六杆Ⅲ级机构中AB、BC的尺寸为
。则原六杆Ⅲ级机构中AB、BC的尺寸为

例9-5 如图9-10所示已知L=100,d=c=40,e=20,g=80,θ=60°。求带一个滑块的六杆Ⅲ级机构满足AB为曲柄时,杆长a、b、h的大小。
解:由式(9-21)得
h≤g-e=60
取h=40,求得杆GF的摆角范围为45.5225°~108.5904°。将该摆角均分为180等分计算F点往复运动的360个点位的C点位置后得 ,
, 。由式(9-22)得
。由式(9-22)得
b=137.290314,a≤62.551548
然后可依前述方法,利用计算机计算有曲柄条件。程序如下:(https://www.xing528.com)
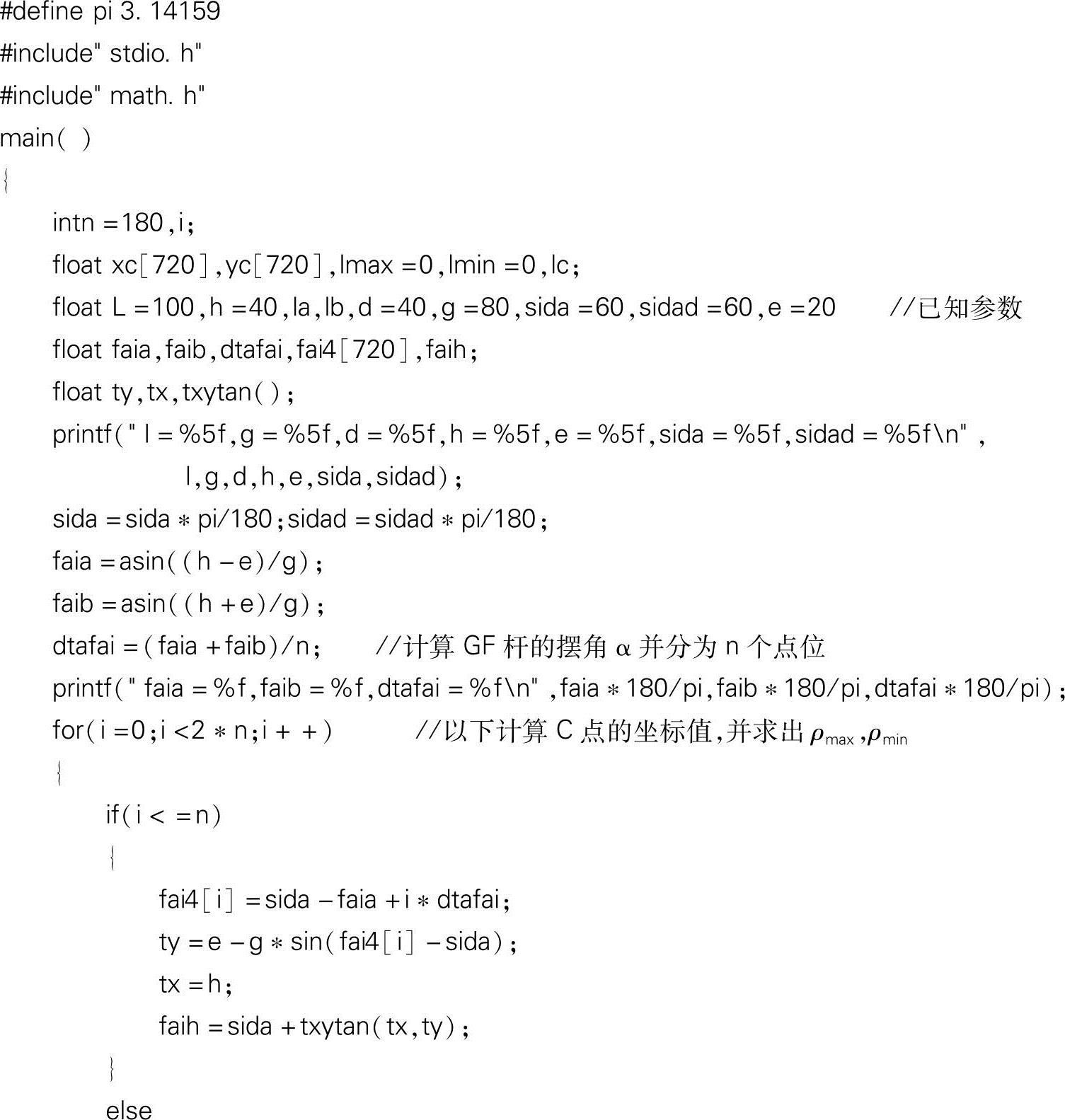
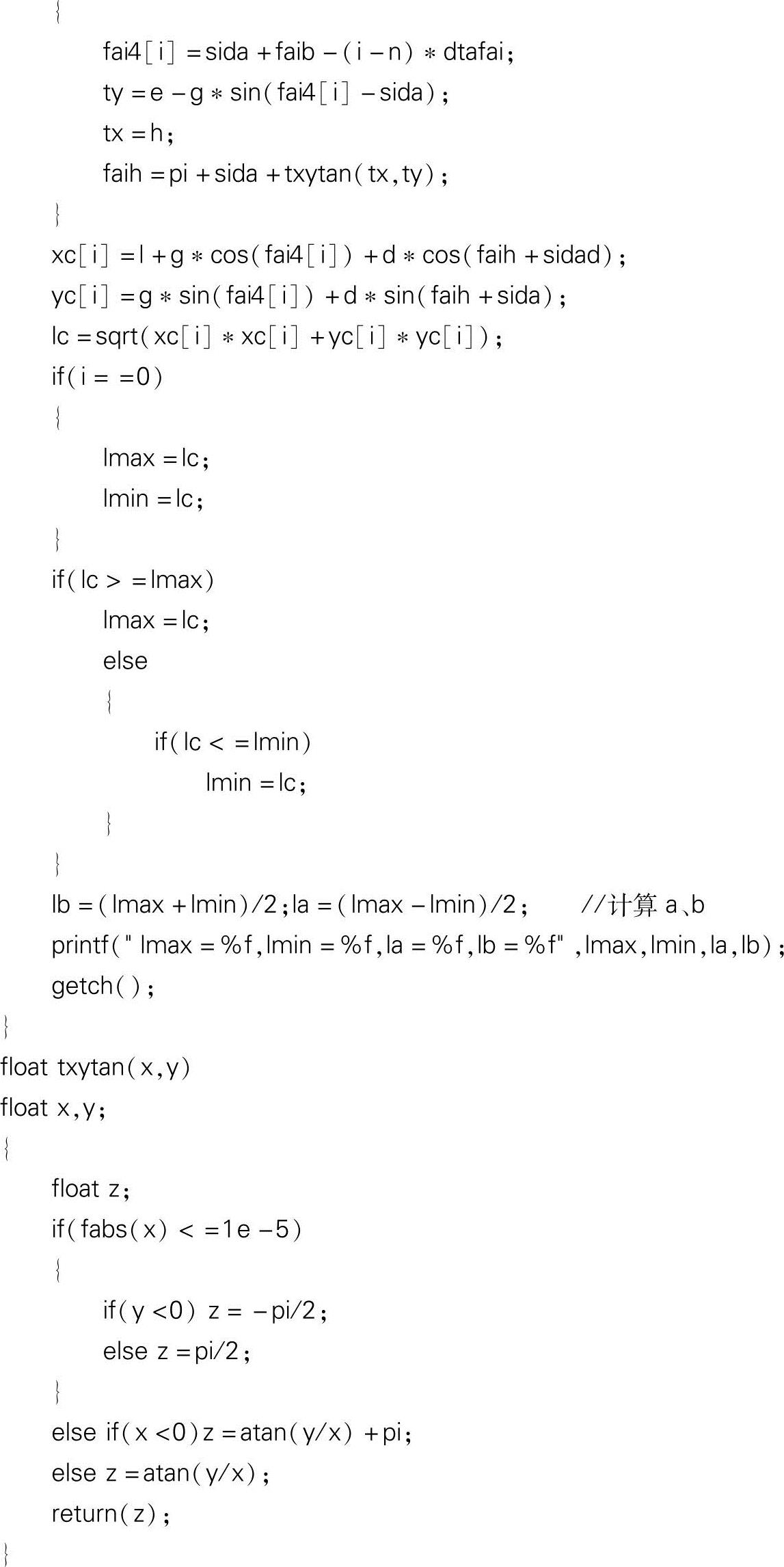
运算过程及结果
L=100.000000,g=80.000000,d=40.000000,h=40.000000,e=20.000000,sida=60.000000,
sidad=60.000000 (注:打印已知参数)
faia=14.477524,faib=48.590420,dtafai=0.350377 (注:打印GF杆的摆角α及n分度角)
lmax=199.841858,lmin=74.738762,la=62.551548,lb=137.290314 (注:打印C点最大、最小向径即a、b的数值)
2.带两个滑块的六杆Ⅲ级机构的有曲柄条件
图9-9b所示为以AB为主动件的Ⅲ级机构,若将滑块D变换为主动件后,得到如图9-11所示的Ⅱ级机构(其中的二杆组AB用虚线绘出)。已知机架尺寸L、e及GC的杆长g,可以确定杆长h及原六杆Ⅲ级机构的曲柄半径a。图9-11所示GC1D1、GC2D2为四杆机构DCG的极限位置,由于滑块D可通过中垂线作对称往复运动,故应满足如下关系:
h=e+L+g (9-23)
此时,曲柄半径应保证滑块在极限位置内运动。由极限位置的几何关系得曲柄AB的尺寸:
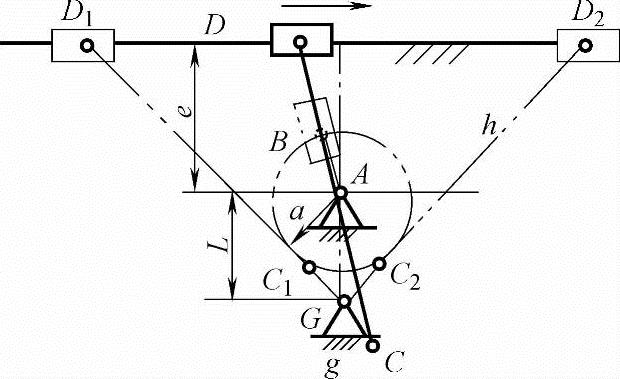
图9-11 Ⅱ级机构

例9-6 如图9-9b所示的Ⅲ级机构中,已知L=100,e=80,g=50,求满足该Ⅲ级机构AB构件为曲柄时的杆长a和杆长h。
解:按式(9-23)得h=e+L+g=230。由式(9-24)得a≤76.5986。此时a的取值可保证滑块在其极限运动区域内运动,否则运动出现干涉。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。