



四杆机构包括铰链四杆机构、导杆机构及曲柄滑块机构等。
1.铰链四杆机构的可动性条件
如图9-1所示,曲柄AB只要能通过两极限位置AB1、AB2即可整周转动,因此由此构成的两三角形存在。由△AC1D和△AC2D得
b-a+d≤c
或
b-a+c≤d
及
a+b≤c+d
整理得


图9-1 铰链四杆机构可动性条件
将式(9-1)中各项两两相加得

由式(9-1)、式(9-2)可知,a为最短杆,而b、c、d中必有一最长杆。故可得到,机构中,四杆中最短杆与最长杆之和小于或等于其他两杆之和时,最短杆可整周连续运动。
为清晰起见,设四个构件的长度用L短、L长、L1、L2表示。由式(9-1)得
L短+L长≤L1+L2 (9-3)
式(9-3)称为铰链四杆机构的杆长之和条件。由低副运动的可逆性及机构命名的规定知,若铰链四杆机构满足杆长之和条件,以短杆的邻杆为机架得曲柄摇杆机构;以短杆为机架得双曲柄机构;以短杆的对杆为机架得双摇杆机构,该机构的连杆为短杆仍可作整周运动。故可把铰链四杆机构的可动性条件描述为:铰链四杆机构若满足杆长之和条件,不论以何杆为机架,只要以短杆为主动件机构就具有可动性。
2.导杆机构的可动性条件
导杆机构的可动性按不同构件为主动件有所不同。
(1)以滑块为主动件 如图9-2所示,可分为两种情况:
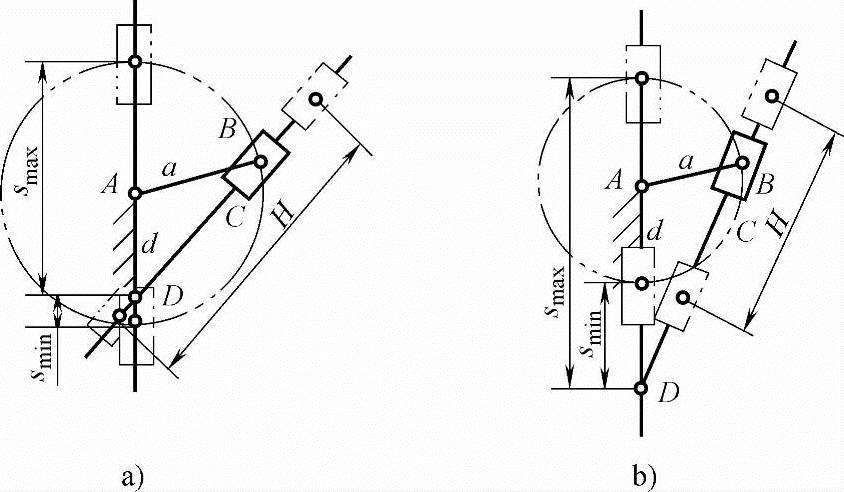
图9-2 导杆机构可动性条件
a)a>d时 b)a<d时
1)a>d。由图9-2a可知,当主动件在导杆DC上运动时,滑块可能运动到的两极限位置位于支座D的两边,此时滑块行程H=smax+smin,机构尺寸应满足:
smax≤a+d
smin≤a-d
两式相加得
a≥H/2 (9-4)
2)a<d。由图9-2b可知,滑块运动到两极限位置时,即位于支座D的同边,此时滑块的行程H=smax-smin,机构尺寸应满足:(https://www.xing528.com)
smax=a+d
smin=d-a
两式相减得
a=H/2 (9-5)
故得导杆机构以滑块为主动件时的可动性条件为:导杆机构中滑块为主动件时,a应等于滑块行程的一半。
(2)以旋转运动的构件为主动件 导杆机构以旋转运动的构件为主动件时的可动性条件为:导杆机构中曲柄为主动件时,不论曲柄和机架如何取值,曲柄均可整周转动,a>d时为转动导杆机构,a<d时为摆动导杆机构。
3.曲柄滑块机构的可动性条件
(1)滑块为主动件 如图9-3所示,由△AC1E1,△AC2E2,得
s0+H<b+a
(9-6)
s0<b-a
由式(9-6)得
b>s0+H-a
(9-7)
a<b-s0
(2)曲柄为主动件 由△AC1E有

图9-3 曲柄滑块机构可动性条件
AC1>e
得
a<b-e (9-8)
曲柄滑块机构的可动性条件为:滑块为主动件时应满足式(9-7)的两个条件;曲柄为主动件时应满足a<b-e。
例9-1 求曲柄滑块机构滑块为主动件时的可动性条件。设H=400,s0=500,e=100。求满足可动性条件的尺寸a和b。
解:先设定a,由式(9-7)的第一个公式求得b,再由式(9-7)的第二个公式判定设定的a是否合适。
(1)取a=200,由式(9-7)的第一个公式得b>500+400-200=700。取b=750后得a<b-s0=750-400=350,故a、b取值满足式(9-7)。此时滑块的可能行程为

(2)取a=300,求得b>500+400-300=600,取b=650。此时滑块的可能行程为H2=609.31>H。
可见均满足主动件的行程要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。