



1.铰链四杆机构
如图8-5所示,已知两连架杆预期所对应转角φi、ψi(i=1,2,…,n),试设计该四杆机构。由于实现连架杆对应位置与杆长绝对值无关,故图中a、b、c、d均为相对尺寸。α,β分别为两连架杆的初位角。已知d=1,机构待定参数a,b,c,α,β共5个,为得到其精确唯一解应列出五个方程,即连架杆对应位置n=5,当α,β已给定时,机构待定参数3个,只能实现两连架杆三个对应位置。
由环路ABCD得矢量方程:a+b=d+c其投影方程式为 (i=1,2,3,…,n)上式消去φ2得到
(i=1,2,3,…,n)上式消去φ2得到
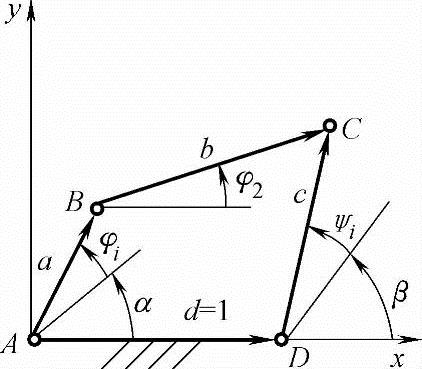
图8-5 按两连架杆对应位置的机构综合模型

若α,β为给定值,求a、b、c,则式(8-12)可写成如下广义多项式形式
p0cos(ψi+β)+p1cos(ψi-φi+β-α)+p2=cos(φi+α) (i=1,2,3,…,n)(8-13)
式中
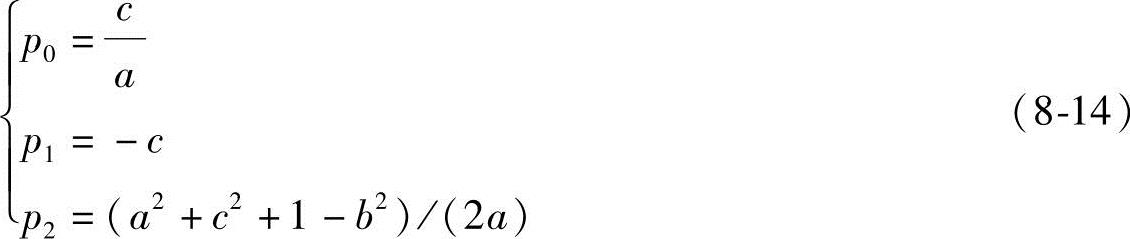
式(8-13)为含有三个待求量p0、p1、p2的线性方程组,将ψi、φi(i=1,2,3)分别代入式(8-13)中,可求出p0、p1、p2,再由式(8-14)计算出a、b、c。
应该指出若α、β也为待求量,则未知参数为5个:a,b,c,α,β。此时应将式(8-14)中变换的三角函数项展开,并简化为p0cosφi+p1sinφi+p2cosψi+p3sinψi+p4-(p0p2+p1p3)cos(ψi-φi)-(p0p3-p1p2)sin(ψi-φi)=0(i=1,2,3,…,n)
(8-15)
式中
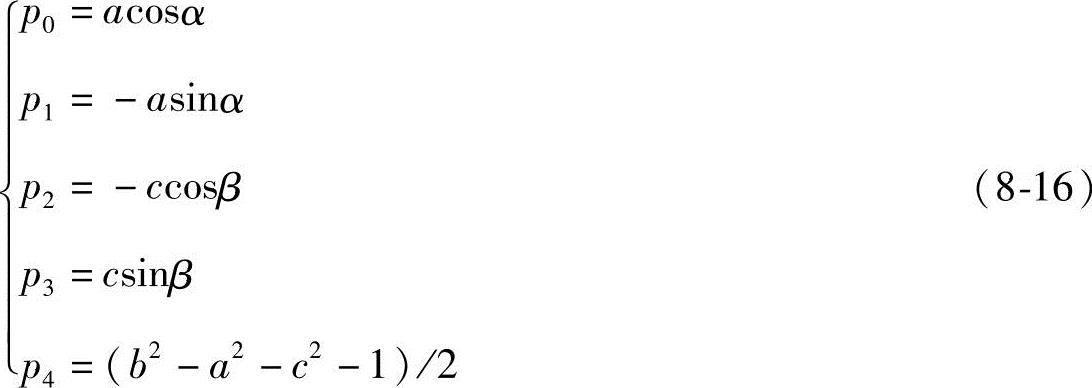
式(8-15)是pj(j=0,1,2,3,4)的非线性方程组,求解比较麻烦,可采用牛顿-拉普森(Newton-Raphson)法求解。
例8-1 如图8-6所示,要求在φi=0°~180°范围内两连架杆实现对应转角:ψi=30sinφi (i=1,2,3,…,n)。初位角α=101.2°,β=29.4°。设d0=1,要求按零值公式确定三个点位,用代数综合法求机构相对尺寸a0,b0,c0;或按平方逼近法取180个点位,求机构相对尺寸a0、b0、c0。
解:用代数综合法求解时,将式(8-13)写成矩阵式:
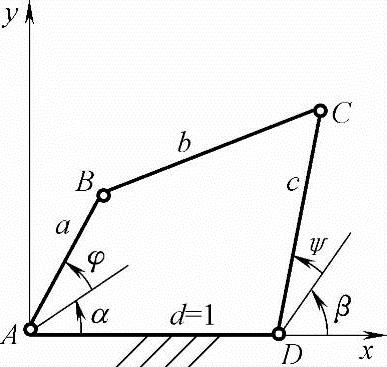
图8-6 按连架杆对应位置设计机构模型
 (https://www.xing528.com)
(https://www.xing528.com)
代入已知量求解即可。
用平方逼近法求解时,将式(8-3)、式(8-8)、式(8-9)写成矩阵式:

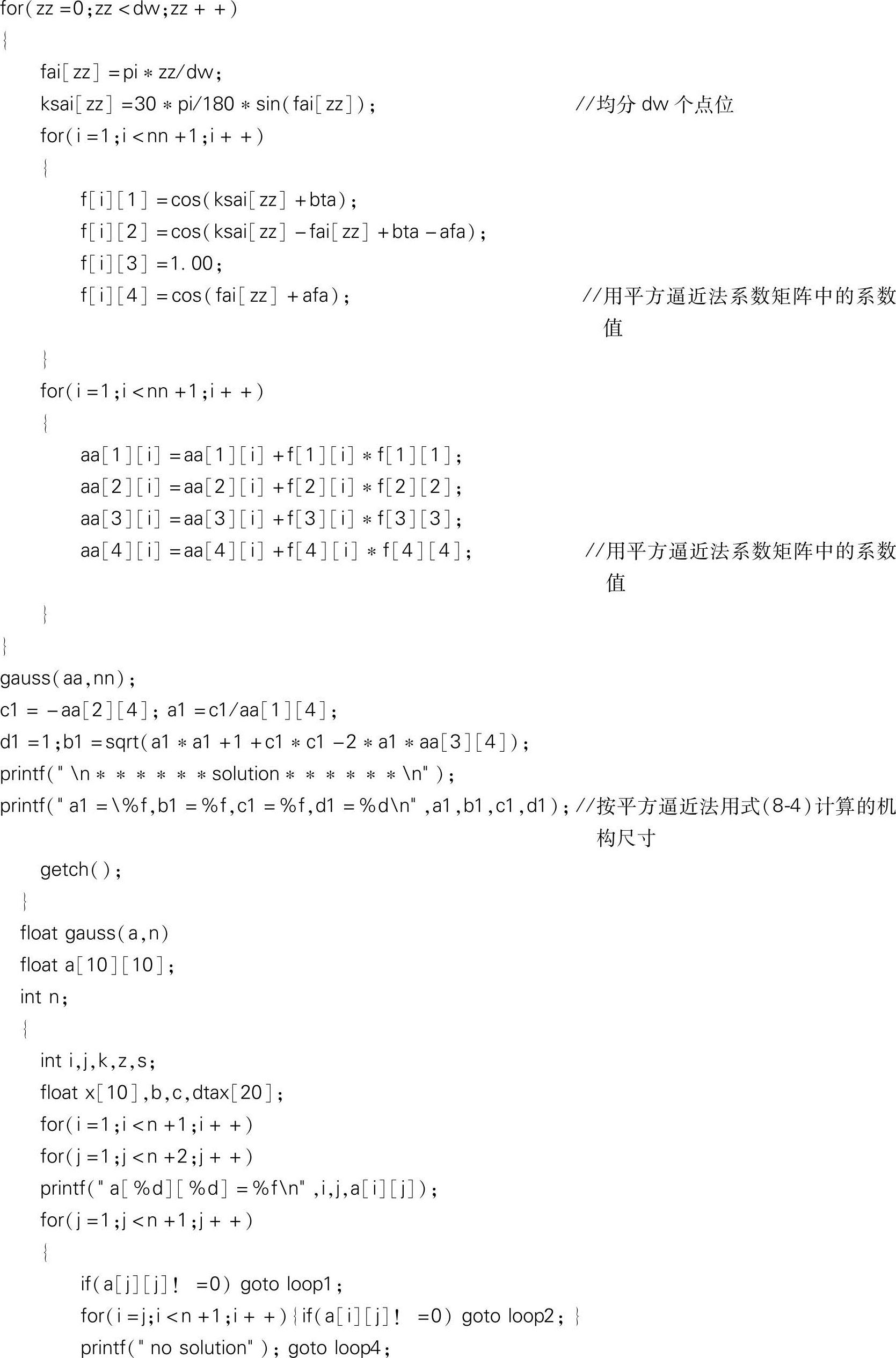
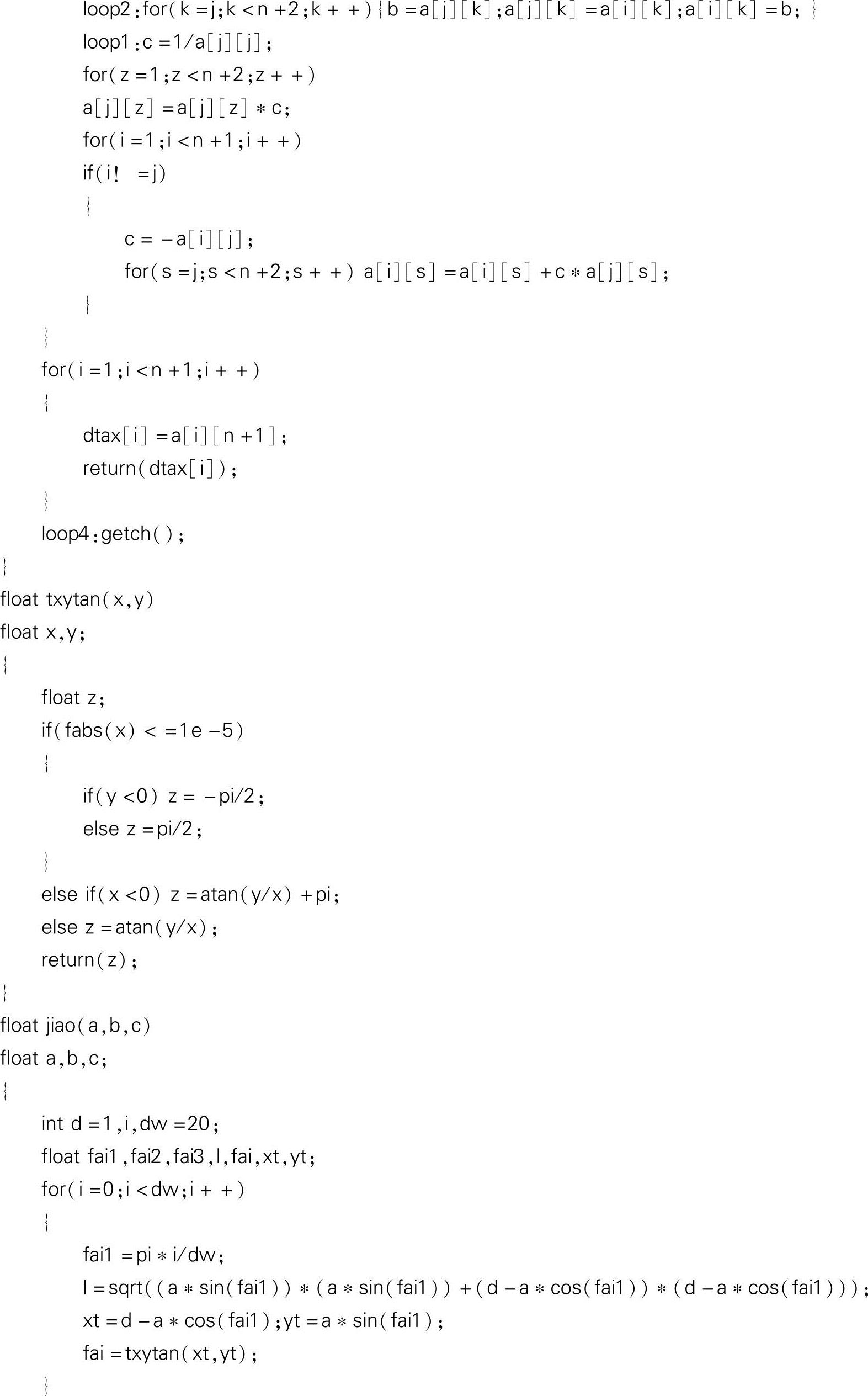
代入已知量求解即可。两种解法的计算机程序如下,可供参考。
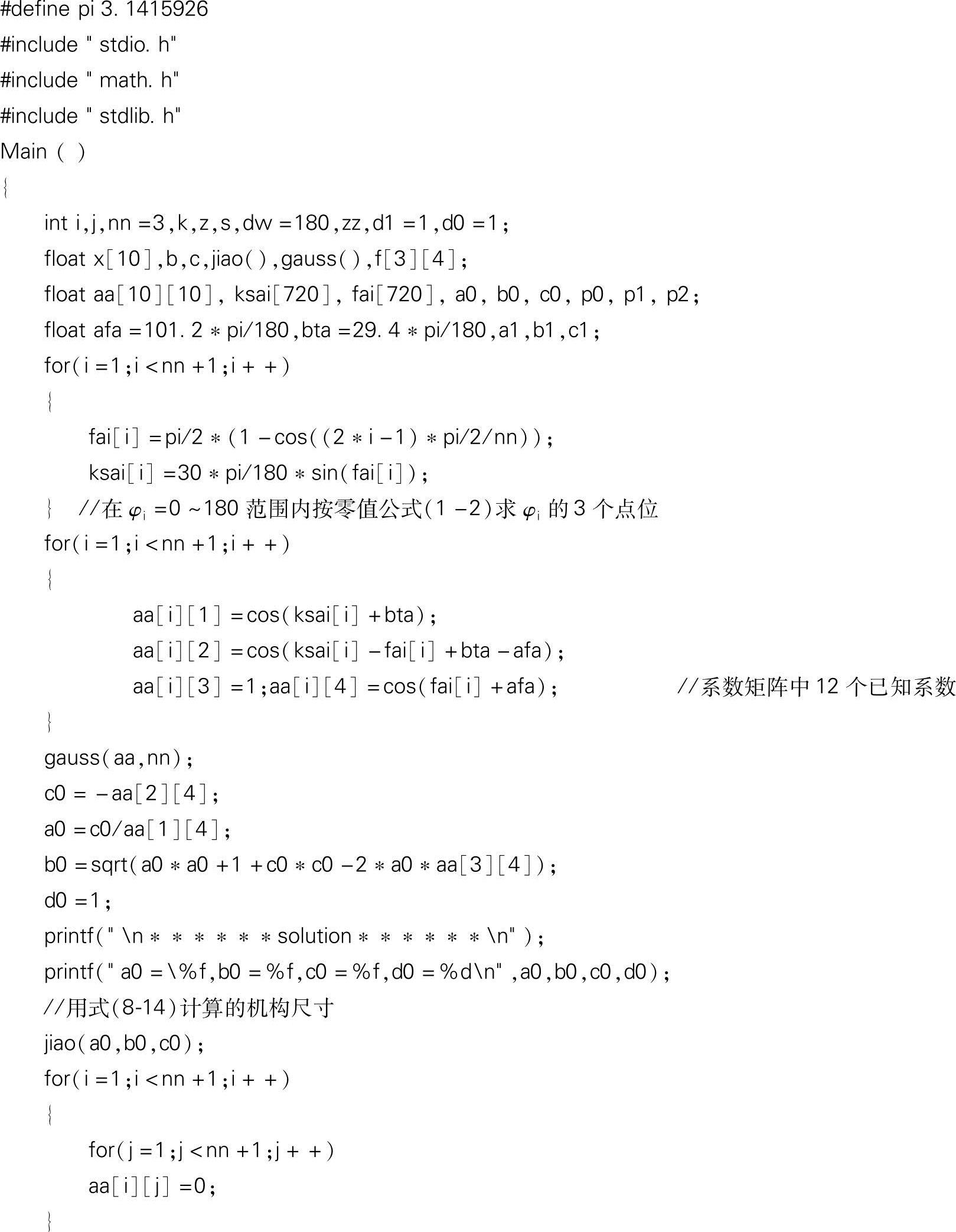
按上述两种方法得到的机构尺寸验算一个点位的运动精度,如取φ=90°时,ψ=30°sin90°=30°。按代数综合法计算尺寸得ψ=28.027°;按平方逼近法计算尺寸得ψ=30.4478°。两者的相对误差分别为6.6%和1.5%。
2.曲柄滑块机构
对于曲柄滑块机构,如图8-7所示。已知φi、si(i=1,2,3)三对应位置。由环路ABCD可得矢量方程a+b=s+e,其投影方程为
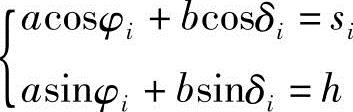
将上式平方相加消去δi,经整理后得
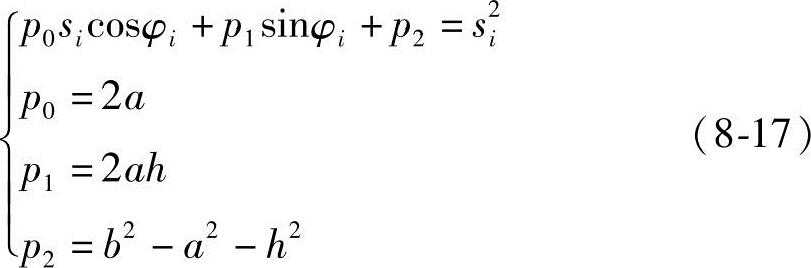
将φi,si(i=1,2,3)代入式(8-17),先求出p0、p1、p2,即可计算出a、b、h。
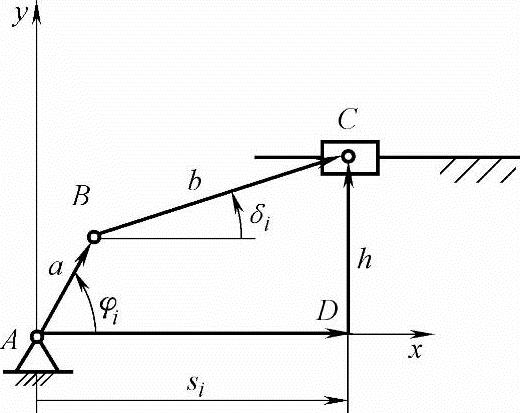
图8-7 曲柄滑块机构对应位置的机构综合模型
应该指出,当构件AB的初位置角φ0、滑块C的初位移s0也为待求量时,将得到待求量为a、b、h、φ0、s0的五元非线性方程组,可采用Newton-Raphson法求解。此处不再累述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。