



优化问题实质上是求极值的数学问题。这一问题的求优过程有两种求解方法。一种是解析法,即应用数学中的微分学求极值的方法。如果目标函数值在定义区间内连续且存在一阶、二阶偏导数,则目标函数F(X)对各变量的偏导数在该点等于零时,其目标函数在该点有最小函数值,该点即最优点。但是工程中的优化设计,其目标函数和约束函数往往是高次多元函数,求导也存在一定困难,用解析法求解会显得非常复杂。在这种情况下,就只能采用优化问题的另一种解法,即数值迭代法,根据目标函数值的变化规律,沿着能使目标函数值下降的方向,逐步向目标函数值最小点进行搜索。这种方法是一种近似求解函数最小值的计算方法。
1.数值迭代计算的基本概念
数值迭代法的基本思想是:从某已知初始点开始,按照一定的原则和逻辑结构进行目标函数的反复计算,一步步寻求目标函数值不断下降的设计点,直至获得满足给定精度的近似优化解。具有这种特点的计算方法称为数值迭代法。显然,数值迭代的工作量很大,必须借助于计算机编程运算。
现结合二维问题的图形(图7-3)来说明优化算法的迭代过程。设优化点为X*,先从某一个选定的初始点X(0)(图7-3画出了从两个不同的初始点X1(0)和X2(0)开始所经过的迭代过程)开始,沿某优化方法所规定的方向S(0),确定适当的初始步长α(0)。从初始点开始,按下式产生一个新的设计点X(1):
X(1)=X(0)+α(0)S(0)
使满足
F(X(1))<F(X(0)) 且X(1)∈D
则X(1)就是一个优于X(0)的设计点。
然后以X(1)为新起点,按类似方法产生下一个新设
计点X(2)。如此反复迭代计算,第k+1次迭代为
X(k+1)=X(k)+α(k)S(k) (7-9)
式中,X(k+1),X(k)分别为k+1,k次的迭代点;S(k)为第k次迭代计算的优化方向;α(k)为第k次迭代计算的步长。
使满足
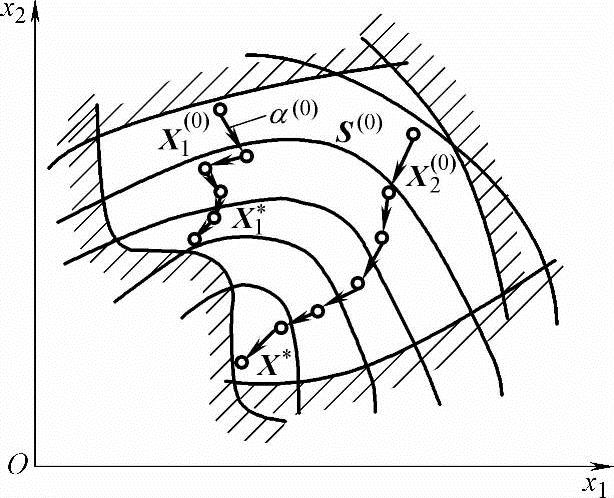
图7-3 优化算法的迭代过程(https://www.xing528.com)
F(X(k+1))<F(X(k)) 且X(k+1)∈D (7-10)
由于每次迭代,其目标函数值均有所下降,故最后必逼近最优点X*。式(7-9)即为基本迭代公式。
按式(7-9)进行一系列迭代计算的基本思想为“下山法”,即每迭代一步都应该使目标函数值有所下降,同时还要为下一步移动的方向提供有用的信息。由以上迭代方程可以看出,优化方法的主要问题是解决如何确定迭代方向S(k)和迭代步长α(k)的问题,以使得每次迭代其目标函数值稳定下降。
2.迭代计算的终止准则
从理论上说,任何一种迭代计算法都可以无穷的序列{X(k),k=0,1…}无限制地进行下去,而且当k→∞时,应该有X(k)→X*。但实际上,优化计算不可能也不必要按上述迭代过程无限制地进行下去,因此有必要有一迭代终止的准则,只要达到预先给定的精度便可以终止迭代计算,并认为已求得近似的最优解。从理论上讲,希望迭代最终优化点与理论极小点之间的距离足够小时,终止迭代。但实际上上述要求无法办到,因为优化设计前理论极小点是未知的,而只能从这一迭代序列中提供的信息来建立终止迭代准则。一般常用的迭代终止准则有:
(1)点距准则 前后两次迭代点X(k+1)、X(k)之间矢量差的模已充分小,达到预定的精度值ε时,即

则认为X(k+1)≈X*,终止迭代。
(2)函数下降量准则 前后两次迭代点的函数值下降量已充分小,达到预定的精度ε时,即
F(X(k+1))-F(X(k))≤ε (7-13)
或当F(X(k+1))≠0时
则认为X(k+1)≈X*,终止迭代。
以上各式中的ε代表收敛精度值,其值可以根据不同的迭代计算方法和工程实际问题的性质而定。这两种终止准则都在一定程度上反映了达到最优点的程度,但是都各有一定的局限性。单独用某一种终止准则遇到一些特殊形态的目标函数时,可能会造成迭代过早结束,因此最好同时用这两种终止准则,以保证能收敛于最优点。式(7-14)比式(7-13)更能反映目标函数的变化程度,但当F(X(k+1))→0时,终止准则不能采用式(7-14),否则会致使计算提前终止。在优化问题的实际计算中,还常常附加最大迭代次数作为终止准则,以免计算时间过长或死循环。

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。