



港口起重机是用于港口码头装卸货物的机械设备。如图6-15所示,要求货物悬挂点P在高度为h的水平线上往复运动。移动中P点作近似匀速运动,以避免货物摆动,除此还希望机构有较好的传动性能。对于机构多种要求的设计,只有通过优化设计得到较为满意的近似解。而位移矩阵设计只能满足机构的位置要求,而且仅能在运动全域中的几个点位得以实现,设计方法为:
1.分析设计任务
如图6-15所示,点P在水平线上由近到远运动时,悬挂杆BP的倾斜角β越来越小,其与坐标x关系为
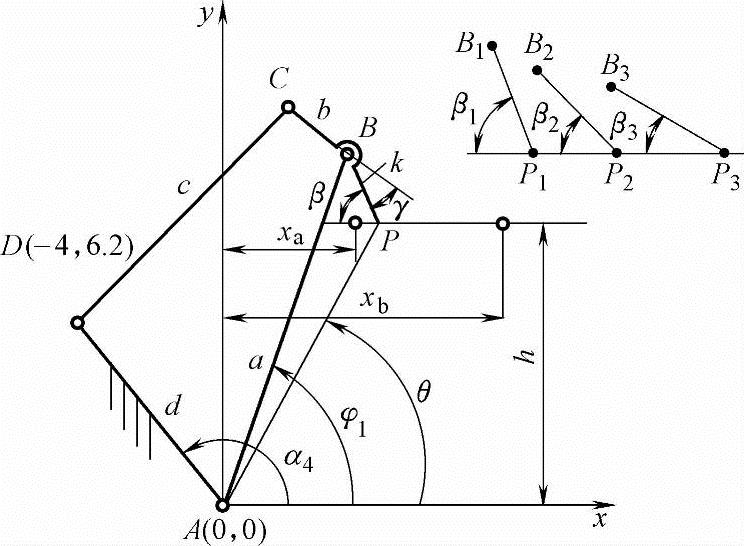
图6-15 港口起重机设计
β=93.4-6x-0.17x2 (6-30)
xa=3m、xb=9m为运动域的下限和上限。支座A、D的坐标为A(0,0)、D(-4,6.2)。用位移矩阵法设计该机构。
如第1章所述,要在整个运动域内精确实现以上要求一般是不可能的,只能采用准点法。为了减小结构误差,用切比雪夫零值公式配置准点

当n=3时,有
xi=6-3cos[(2i-1)180°/6](i=1,2,3,…) (6-31)
当i=1、2、3时,由式(6-31)得x1=3.4,x2=6,x3=8.6。再由式(6-30)得悬挂杆的倾角:β1≈71°,β2≈51°,β3≈29°。
由此得到在运动域内P点三个坐标值:P1(3.4,10),P2(6,10),P3(8.6,10),按逆时针得到的悬挂杆平面转角为θ2=20°,θ3=42°。
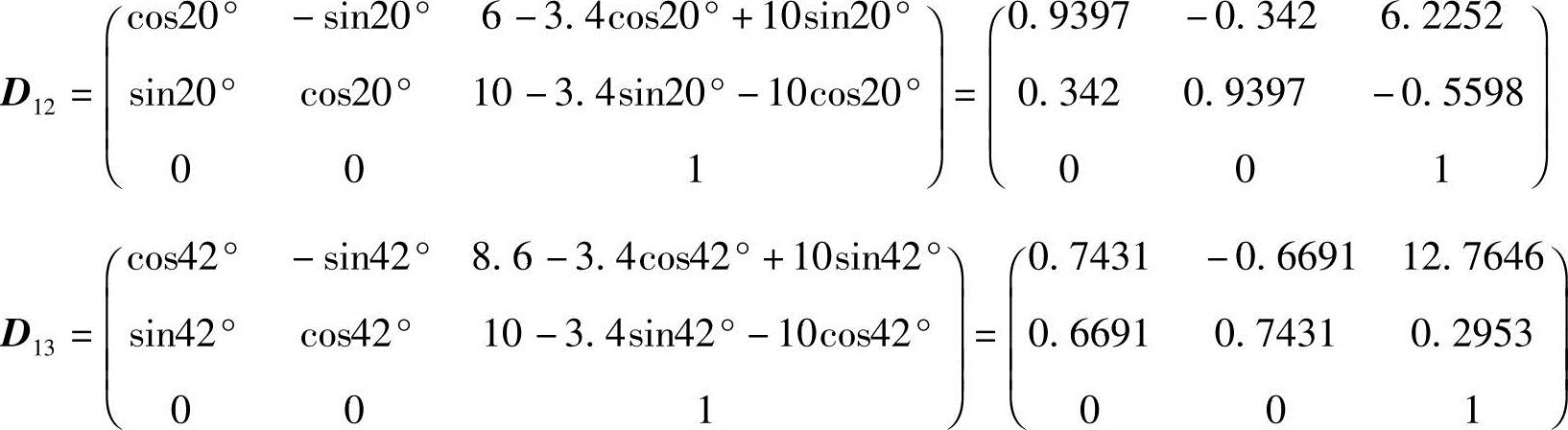
2.两位置的位移矩阵

按P点三个坐标值及悬挂杆平面转角列出
3.求系数Aj、Bj、Cj(https://www.xing528.com)
因为支座A坐标为(0,0),由式(6-18)得
A2=5.6472,B2=-2.654,C2=-19.5332;
A3=9.6818,B3=-8.3227,C3=-81.5106。
4.求B点坐标值
将系数Aj、Bj、Cj(j=2,3)代入式(6-17),得

 ,
,
5.求C点坐标值
同理,由支座D(-4,6.2),代入式(6-17),式(6-18)得
A2=3.2784,B2=-3.6370,C2=-47.9048;
A3=4.5058,B3=-9.4063,C3=-130.7493。

解得 ,
,
6.求机构尺寸
按两点间距离和三角函数公式计算机构尺寸参数为:
k=2.8865m,a=12.9769m,b=2.1510m,c=10.2705m,d=7.3783m,γ=3.973°。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。