



实现已知轨迹的设计问题是指设计一连杆机构,其连杆上某点能再现(或称复演)所要求的轨迹。连杆上任一点的轨迹称为连杆曲线。表6-1给出了不同机构连杆上若干点不同的连杆曲线,可供设计中参考。除用解析法设计机构外,还有一种图谱综合法,即按图谱选择与要求相近的曲线来确定机构的尺寸。这里简单介绍按位移矩阵法进行机构设计的方法。
设给定轨迹的函数为y=f(x),设计一四杆机构并使其连杆上P点的n个位置能拟合给定轨迹,即P点的坐标值满足给定的函数关系

如图6-13所示,P点的位置取决于连杆位置,当P点各位置已知时可以写出连杆位移矩阵。应该注意到该位移矩阵中连杆的相对转角θj是未知的,因此无法单独求出某一连架杆的运动副未知坐标值。如果根据定杆长约束条件写出两连架杆的约束方程并联立,则可求出连架杆运动副坐标值及连杆各未知的相对转角θj。连杆的位移矩阵为
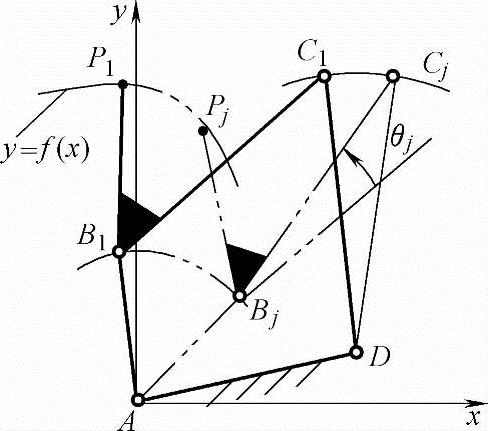
图6-13 轨迹综合 的机构模型

式中,θj为未知量。
Bj、Cj与B1、C1坐标间的关系可用位移矩阵表示
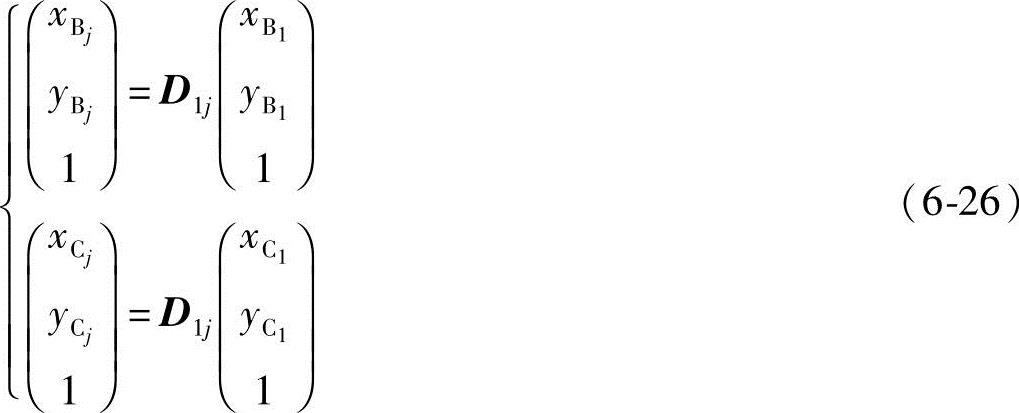
两连架杆杆长约束方程为

将式(6-25)、式(6-26)代入式(6-27)得
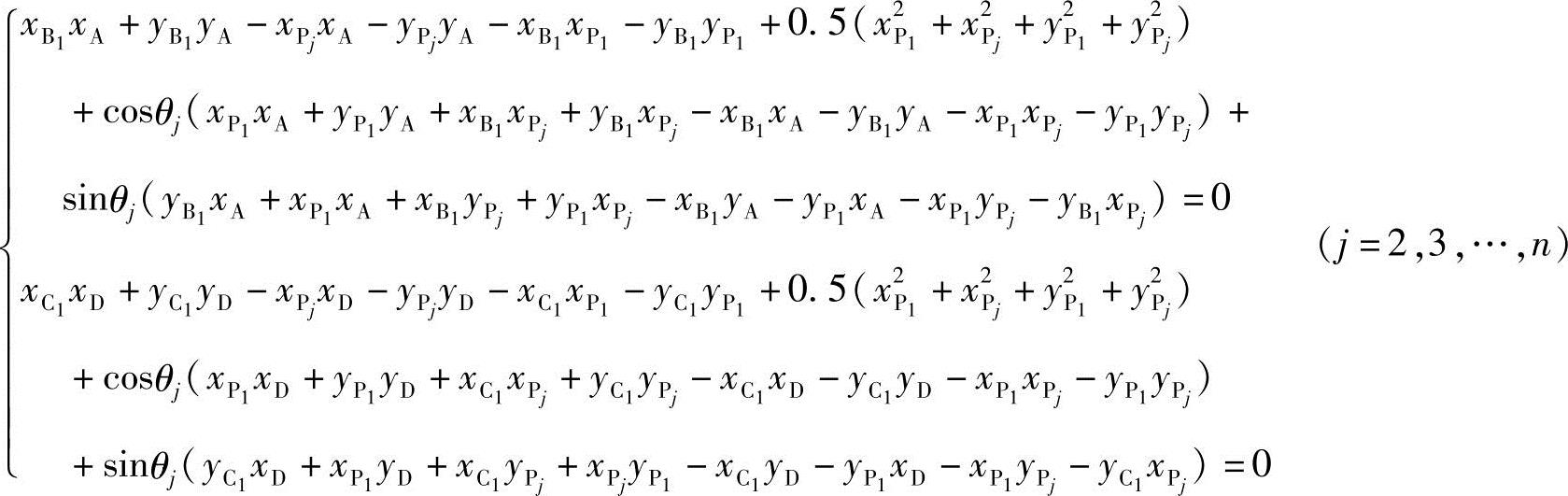
(6-28)(https://www.xing528.com)
式(6-28)表示各运动副位置1坐标与P点给定坐标值以及连杆相对转角间的关系,已知量为 、
、 (j=1,2,…,n),未知量为xA、yA、xD、yD、
(j=1,2,…,n),未知量为xA、yA、xD、yD、
 、
、 、
、 以及连杆相对转角θj(j=2,3,…,n)。可见若给出n个已知点位置,则方程数为2(n-1),待定参数包括8个运动副坐标及n-1个连杆转角。若已有k个待定参数赋值,则待定参数总计为n+7-k。因此有定解的条件为2(n-1)=n+7-k,即
以及连杆相对转角θj(j=2,3,…,n)。可见若给出n个已知点位置,则方程数为2(n-1),待定参数包括8个运动副坐标及n-1个连杆转角。若已有k个待定参数赋值,则待定参数总计为n+7-k。因此有定解的条件为2(n-1)=n+7-k,即
n=9-k (6-29)
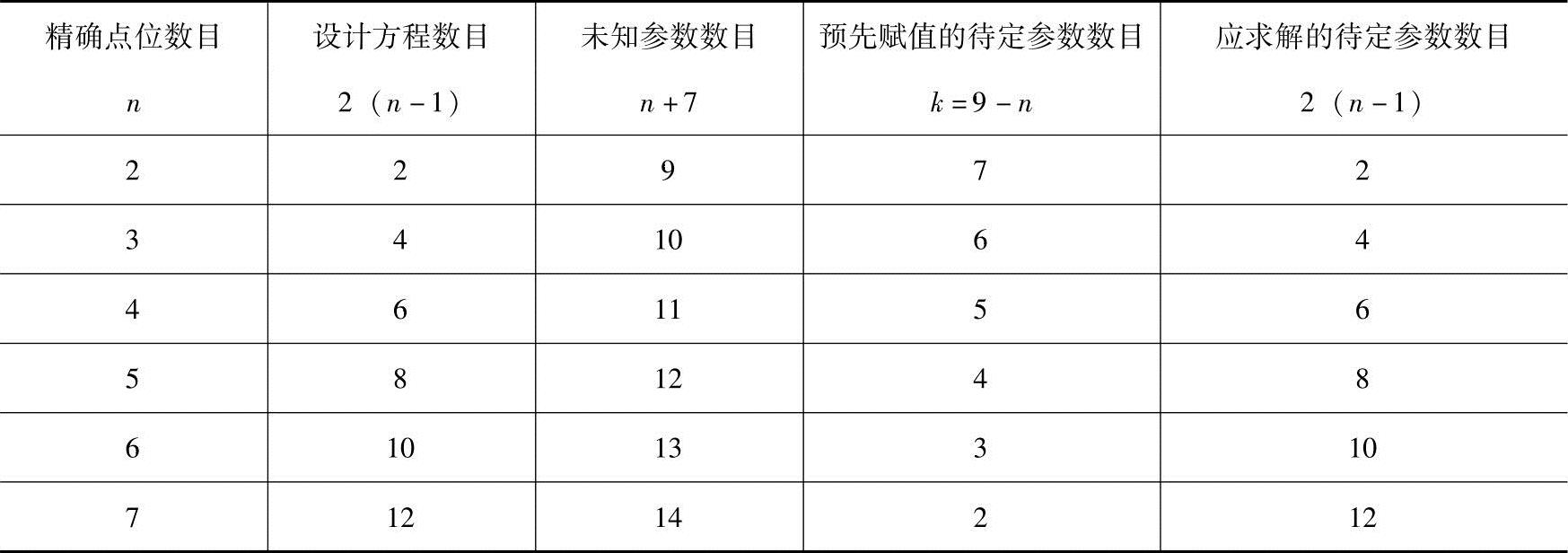
式(6-29)表示有定解的给定点数位n与预先赋值的待定参数数目k间的关系。当k=0时,n=9,即四杆机构最多只能精确实现给定函数轨迹上的9个点。当给定5个轨迹点位时,必须预先给定4个待求量赋值才有定解。当精确实现的点数n=2~9时,其设计方程数目,未知参数数目及预先赋值的待定参数数目见表6-1。
表 6-1
理论上铰链四杆机构能精确实现轨迹上的9个点位,但由于上述设计方程为非线性方程组,只能借助于计算机进行数值迭代求解其逼近值。另外,当点位超过6个时,其是否有解在很大程度上取决于迭代计算所取初值、要求的计算精度及所选点在轨迹上的位置,有时求
解会十分困难。在设计中如果选值不当,还可能出现轨迹失调,即机构运动顺序与轨迹顺序不协调的现象。
例6-7 已知轨迹上5个点位的坐标值P1(1,1),P2(2,0.5),P3(3,1.5),P4(2,2),P5(1.5,1.9)。试设计复演5个点位的铰链四杆机构。
解:如表6-1所示,当n=5时可列出8个方程,未知参数数目为12,若有定解必须预先对4个待求量赋值。设xA=2.1,yA=0.6;xD=1.5,yD=4.2。
将5个点位的P点坐标值代入式(6-28)得8个非线性方程。用牛顿-拉普森(Newton-Raphson)法求解,其结果为

设计所得机构如图6-14所示。
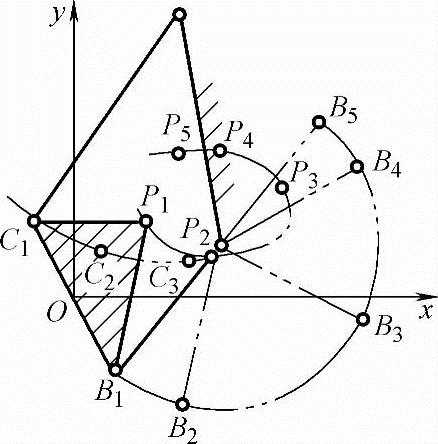
图6-14 四杆机构复演
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。