



按给定的连杆位置综合曲柄滑块机构时,与铰链四杆机构的综合方法一样(图6-6),可取位置1为参考位置写出连杆的位移矩阵。先根据杆长不变约束条件求A、B坐标值,再按定斜率约束方程求解滑块铰链T的位置。
现讨论滑块铰链T的约束直线方程,设已知连杆的三个位置,则滑块铰链T的约束方程为

或写成行列式形式

图6-6 曲柄滑块机构的综合模型

将以上行列式展开

式中, 、
、 、
、 、
、 均可用位移矩阵以
均可用位移矩阵以 、
、 代替。
代替。
式中,dikj(i=1,2,3;k=1,2,3;j=1,2,3)均为已知,求出 、
、 与
与 、
、 的关系后代入式(6-13)可解出
的关系后代入式(6-13)可解出 、
、 。
。
滑块的导路倾斜角α4为
tanα4=(yT2-yT1)/(xT2-xT1) (6-15)
由于三个位置才能列出一个定斜率方程,故当已知n位置时可列n-2个方程。可见方程数与待求量(xT1,yT1)相等时,即n=4时有定解。上述n=3的情况只能求一个未知量,
因此 、
、 之一先给定时有定解。
之一先给定时有定解。
例6-4 已知连杆三位置,P1=(1 1)T,P2=(2 0.5)T,P3=(3 1.5)T;θ2=0,θ3=45°。设固定支座A=(5 0)T,滑块铰链 ,试设计该曲柄滑块机构。
,试设计该曲柄滑块机构。
解:列出两个有限位移矩阵
 (https://www.xing528.com)
(https://www.xing528.com)
先求铰链B的坐标xB1、yB1,因固定支座A=(5 0)T。由式(6-11)得A2=1,B2=-0.5,C2=4.375,A3=3.6467,B3=1.47465,C3=10.4963。将系数值代入式(6-10),
则有

解得 ,
, 。
。
再求滑块铰链T的坐标 、
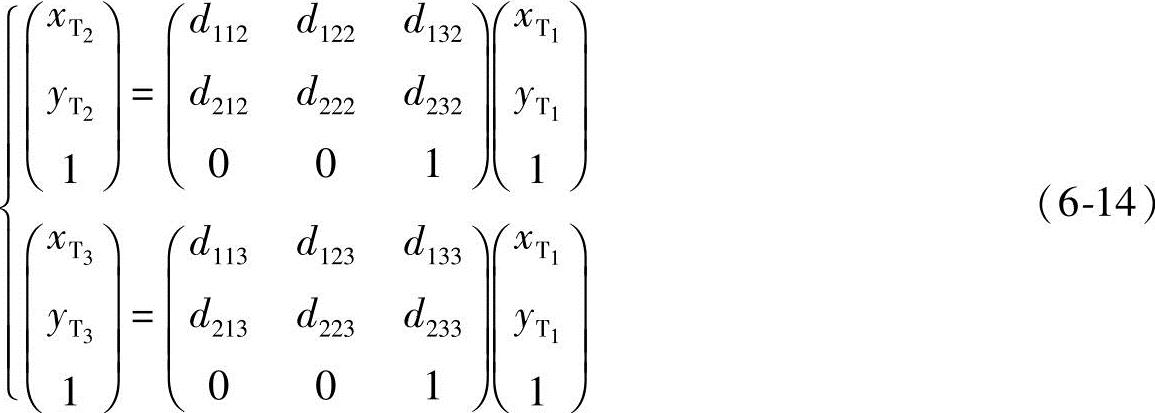
、 。将位移矩阵代入式(6-14),得
。将位移矩阵代入式(6-14),得


将以上结果代入式(6-13),得

解得 。
。
由式(6-15)解得导路倾角

根据几何关系解得机构各杆长
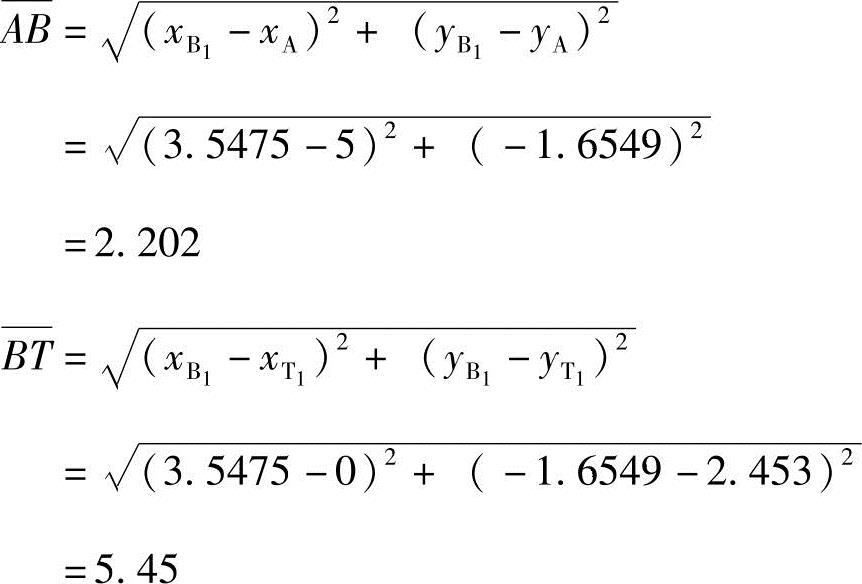
设计所得机构如图6-7所示。

图6-7 曲柄滑块机构综合结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。