



如图6-5所示,给定连杆BC的各位置θj。θj为连杆标线与其第一位置的相对转角(逆时针为正)。要求设计四杆机构实现给定的连杆各位置,即确定支座A、D和第一位置时运动副B1、C1的坐标。
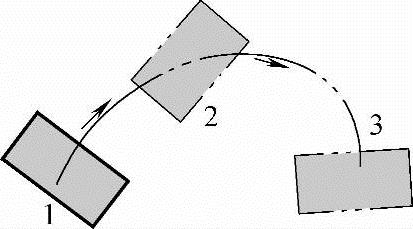
图6-4 刚体导引
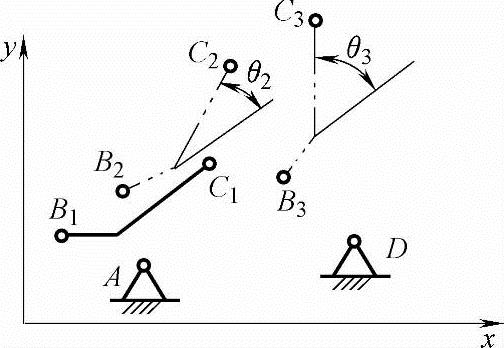
图6-5 刚体导引机构模型
设可动运动副坐标以(xj,yj)表示,支座运动副坐标以(x0,y0)表示。根据可动运动副与其转动支座间距离不变(即杆长不变),可列出如下方程:
(xj-x0)2+(yj-y0)2=(x1-x0)2+(y1-y0)2 (6-8)
根据位移矩阵可写出(xj,yj)与(x1,y1)间的位移方程为

将式(6-9)代入式(6-8)可消去xj、yj,简化后得
Ajx1+Bjy1=Cj (6-10)
其中

由式(6-10)和式(6-11)知,未知量为x1、y1、x0、y0,由于连杆的n个位置可列出n-1个方程,只有方程数与未知量相等时(n-1=4),有定解,故当给定连杆五位置时式(6-10)、式(6-11)有定解。若已知连杆三位置,仅可列出两个方程,四个未知量中必须预先给定两个才有定解。一般给定支座位置(x0,y0),此时式(6-11)中的Aj、Bj、Cj为常数,故式(6-10)为j=2、3的线性方程组。
将运动副B1和支座A的坐标 、
、 和xA、yA分别置换式(6-10)、式(6-11)中的x1、y1和x0、y0,可求出
和xA、yA分别置换式(6-10)、式(6-11)中的x1、y1和x0、y0,可求出 、
、 和xA、yA。同理可求出
和xA、yA。同理可求出 、
、 和xD、yD。
和xD、yD。
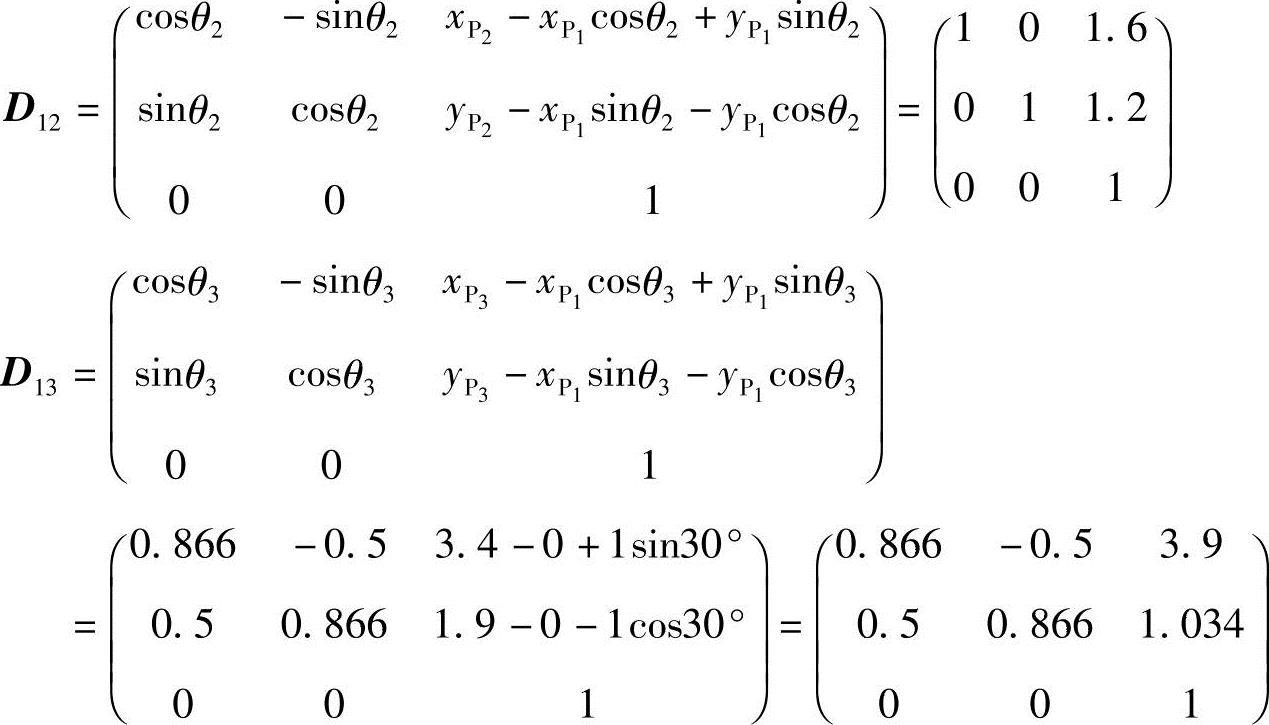
例6-3 已知连杆三位置P1=(0 1)T,P2=(1.6 2.2)T,P3=(3.4 1.9)T;θ2=0,θ3=30°。并给定支座位置A=(0 0)T,D=(5 0)T。试设计一铰链四杆机构。
解:将给定参考点P1、P2、P3的坐标及转角代入式(6-4):
先计算支座A及运动副B1的坐标值。由于A=(0 0)T,由式(6-11)得(https://www.xing528.com)
A2=1×1.6+0×1.2+(1-1)xA-0yA=1.6
B2=0×1.6+1×1.2+(1-1)yA-0xA=1.2
C2=1.6×0+1.2×0-0.5(1.62+1.22)=-2
同理得A3=3.8944,B3=-1.0546,C3=-8.1396
将Aj、Bj和Cj(j=2,3)代入式(6-10)有

解出 ,
, 。
。
再计算支座D及运动副C1的坐标值,由于D=(5 0)T,根据D12,D13及式(6-11)
得
A2=1×1.6+0×1.2+(1-1)xD-0×yD=1.6
B2=0×1.6+1×1.2+(1-1)yD-0×xD=1.2
C2=1.6×xD+1.2×yD-0.5(1.62+1.22)=6
同理得A3=4.5644,B3=1.4454,C3=11.36042
将Aj、Bj、Cj(j=2,3)代入式(6-10)得线性方程组:
解得 ,y
,y 。
。
当求出该机构位置1时连杆铰链点B1、C1的坐标后,即可根据两点间的距离公式求出各杆长度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。