



如图6-1所示,要求沙箱运动占有三个位置1、2、3。其上P点三位置的坐标值及其姿态均已知,希望点P绕固定支座OQ转动占据给定三位置,但P点的转动中心却在点OP。为了在沙箱上根据已知点Pj(j=1,2,3)找到另外一点Qj(j=1,2,3),使其转动中心位于固定支座OQ。需要建立平面运动刚体上未知点与已知点间的坐标方程式。
如图6-2所示,刚体的位置可用其上一直线PQ表示。其任意位置j用PjQj(j=1,2,3)表示。
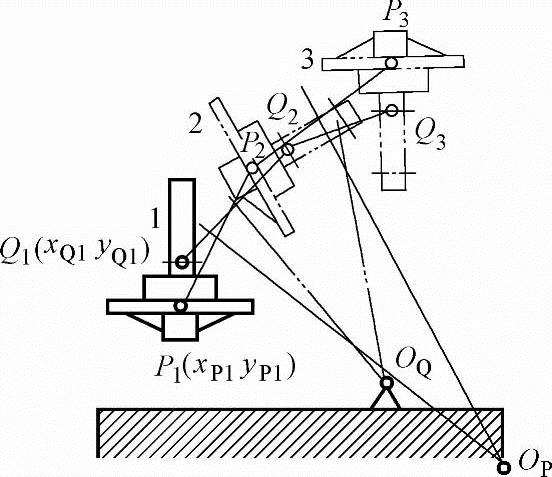
图6-1 沙箱的运动
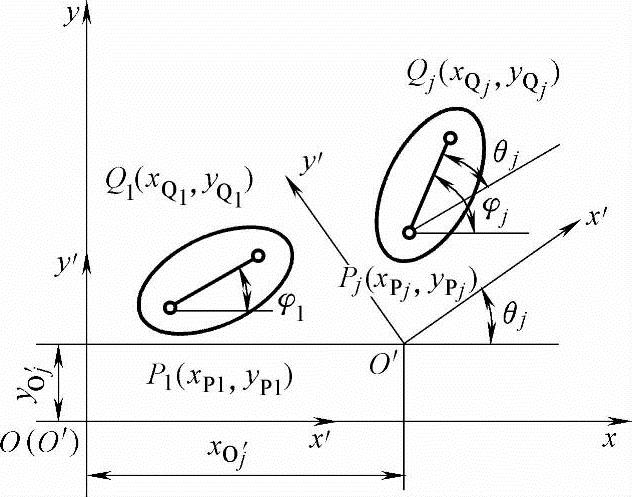
图6-2 刚体的有限位移图
Oxy为固定坐标系,与刚体PQ固定的O′x′y′为动坐标系。位置P1Q1处动、定坐标系重合。现使刚体与动坐标系O′x′y′一起相对于定坐标系Oxy作有限位移,到任意位置j。动坐标系相对定坐标系的转角(即刚体PjQj相对P1Q1的转角)用θj表示。
θj=φj-φ1 (6-1)
若已知P点的位置参数,该刚体上另一点Q与已知点P间的关系式为

式(6-2)可写成矩阵表达式:

若

式中,d13j=xPj-xP1cosθj+yP1sinθj;d23j=yPj-xP1sinθj-yP1cosθj,即动坐标系的原点O′在定坐标系中的坐标值xO′j、yO′j,故D1j称为从位置1到位置j的刚体平面运动的位移矩阵。因此,只要已知刚体的n个位置(即刚体某点的n个坐标值及其n-1个平面运动转角)就可以写出n-1个位移矩阵。
则式(6-3)可表达为

设刚体绕z轴转动,即动坐标系原点位置不变而绕定坐标系原点转动。此时d13=d23=0,其位移矩阵用R1j表示,称为平面转动矩阵。有如下形式
 (https://www.xing528.com)
(https://www.xing528.com)
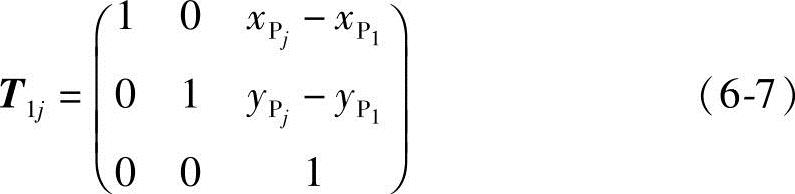
当刚体作平动,即θj=0时,cosθj=1,sinθj=0。位移矩阵用T1j表示,称为平动矩阵,并有如下形式
例6-1 如图6-3所示,构件PQ作平面有限位移,已知构件初位置P1=(1 1)T,Q1=(3 1)T,若P点到位置P2=(3 2)T并相对第一位置转角为θ2=60°,求Q2。
解:写出位移矩阵式并代入已知数值。
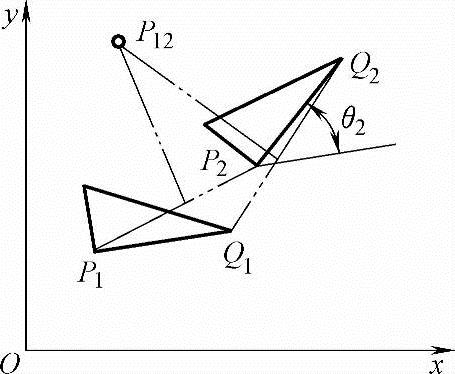
图6-3 刚体位移

将上式代入式(6-3),得
解得Q2=(4.000 3.732)T。
例6-2 如图6-3所示,已知条件同例6-1,求构件从位置P1Q1到P2Q2的转动中心P12。
解:由于P12为转动中心,故从位置1到位置2时P12点不动,即运动前后P12的坐标值不变。将位移矩阵代入式(6-3),得
展开后
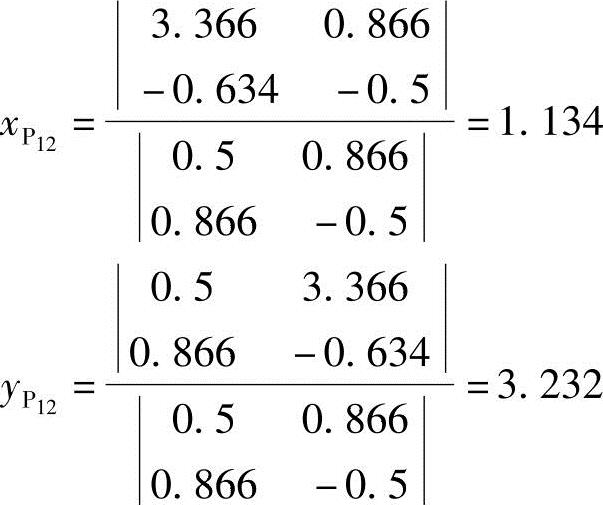
解得
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。